YOLOv8 тренирует ваш собственный набор данных
В этом примере мы используем модель обнаружения целей YOLOv8 в Ultralytics для обучения нашего собственного набора данных, чтобы мы могли обнаруживать воздушные шары.
#Установить
!pip install -U ultralytics -i https://pypi.tuna.tsinghua.edu.cn/simpleimport ultralytics
ultralytics.checks()
1. Подготовьте данные
Обучение модели yolo требует организации набора данных в формате набора данных yolo. Затем напишите файл конфигурации набора данных yaml.
yolo_dataset
├── images
│ ├── train
│ │ ├── train0.jpg
│ │ └── train1.jpg
│ ├── val
│ │ ├── val0.jpg
│ │ └── val1.jpg
│ └── test
│ ├── test0.jpg
│ └── test1.jpg
└── labels
├── train
│ ├── train0.txt
│ └── train1.txt
├── val
│ ├── val0.txt
│ └── val1.txt
└── test
├── test0.txt
└── test1.txt
Формат файла метки (например, train0.txt) следующий:
class_id center_x center_y bbox_width bbox_height
0 0.300926 0.617063 0.601852 0.765873
1 0.575 0.319531 0.4 0.551562
Обратите внимание, что class_id начинается с 0, а координаты центральной точки, а также высота и ширина являются относительными координатами.
Используйте Labelme или makeense для маркировки образцов, чтобы напрямую экспортировать образцы этого типа.
%%writefile balloon.yaml
# Ultralytics YOLO 🚀, GPL-3.0 license
path: /tf/liangyun2/torchkeras/notebooks/datasets/balloon # dataset root dir
train: images/train # train images (relative to 'path') 128 images
val: images/val # val images (relative to 'path') 128 images
test: # test images (optional)
# Classes
names:
0: ballon
Overwriting balloon.yaml
import torch
from torch.utils.data import DataLoader
from ultralytics.yolo.cfg import get_cfg
from ultralytics.yolo.utils import DEFAULT_CFG,yaml_load
from ultralytics.yolo.data.utils import check_cls_dataset, check_det_dataset
from ultralytics.yolo.data import build_yolo_dataset,build_dataloader
overrides = {'task':'detect',
'data':'balloon.yaml',
'imgsz':640,
'workers':4
}
cfg = get_cfg(cfg = DEFAULT_CFG,overrides=overrides)
data_info = check_det_dataset(cfg.data)
ds_train = build_yolo_dataset(cfg,img_path=data_info['train'],batch=cfg.batch,
data_info = data_info,mode='train',rect=False,stride=32)
ds_val = build_yolo_dataset(cfg,img_path=data_info['val'],batch=cfg.batch,data_info = data_info,
mode='val',rect=False,stride=32)
#dl_train = build_dataloader(ds_train,batch=cfg.batch,workers=0)
#dl_val = build_dataloader(ds_val,batch=cfg.batch,workers =0,shuffle=False)
dl_train = DataLoader(ds_train,batch_size = cfg.batch, num_workers = cfg.workers,
collate_fn = ds_train.collate_fn)
dl_val = DataLoader(ds_val,batch_size = cfg.batch, num_workers = cfg.workers,
collate_fn = ds_val.collate_fn)
for batch in dl_val:
break
batch.keys()
dict_keys(['im_file', 'ori_shape', 'resized_shape', 'ratio_pad', 'img', 'cls', 'bboxes', 'batch_idx'])
2. Определите модель
from ultralytics.nn.tasks import DetectionModel
model = DetectionModel(cfg = 'yolov8n.yaml', ch=3, nc=1)
#weights = torch.hub.load_state_dict_from_url('https://github.com/ultralytics/assets/releases/download/v0.0.0/yolov8n.pt')
weights = torch.load('yolov8n.pt')
model.load(weights['model'])
model.args = cfg
model.nc = data_info['nc'] # attach number of classes to model
model.names = data_info['names']
3. Модель обучения
1. Используйте собственный интерфейс Ultralytics.
Чтобы использовать собственный интерфейс Ultralytics, вам нужны только следующие строки кода.
from ultralytics import YOLO
yolo_model = YOLO('yolov8n.pt')
yolo_model.train(data='balloon.yaml',epochs=10)
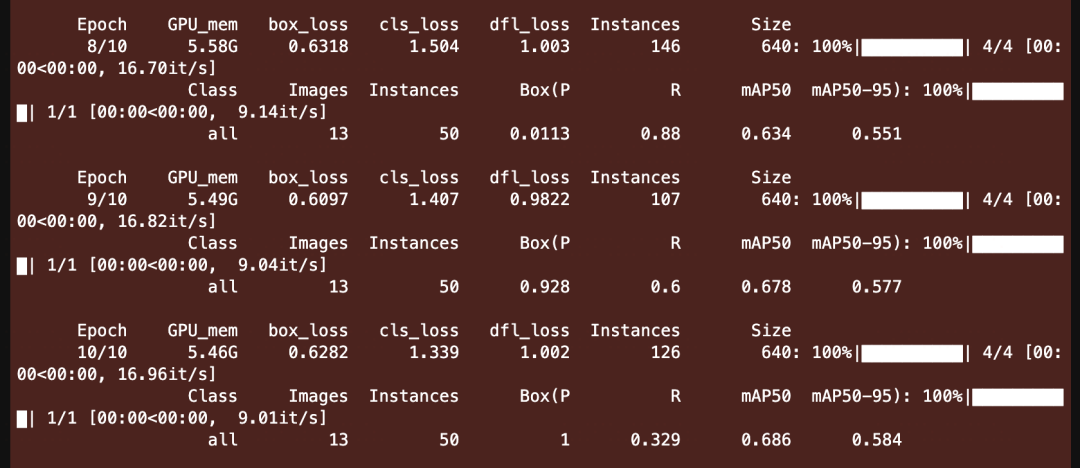
2. Использовать печь мечты Торчкераса.
Хотя использовать собственный интерфейс Ultralytics очень просто, использование torchkeras для реализации пользовательской логики обучения кажется немного излишним.
Однако структура исходного кода Ultralytics относительно сложна, что делает неудобным для пользователей выполнение персонализированных элементов управления и модификаций.
Более того, torchkeras гораздо более элегантен в визуализации, чем собственный обучающий код Ultralytics.
Кроме того, освоение пользовательской логики обучения также будет полезно каждому, чтобы ознакомиться со структурой кода библиотеки Ultralytics.
for batch in dl_train:
break
from ultralytics.yolo.v8.detect.train import Loss
model.cuda()
loss_fn = Loss(model)
optimizer = torch.optim.AdamW(model.parameters(), lr=1e-4)
x = batch['img'].float()/255
preds = model.forward(x.cuda())
loss = loss_fn(preds,batch)[0]
print(loss)
tensor(74.5465, device='cuda:0', grad_fn=<MulBackward0>)
from torchkeras import KerasModel
#Нам нужно изменить StepRunner, чтобы он адаптировался к формату набора данных Yolov8.
class StepRunner:
def __init__(self, net, loss_fn, accelerator, stage = "train", metrics_dict = None,
optimizer = None, lr_scheduler = None
):
self.net,self.loss_fn,self.metrics_dict,self.stage = net,loss_fn,metrics_dict,stage
self.optimizer,self.lr_scheduler = optimizer,lr_scheduler
self.accelerator = accelerator
if self.stage=='train':
self.net.train()
else:
self.net.eval()
def __call__(self, batch):
features = batch['img'].float() / 255
#loss
preds = self.net(features)
loss = self.loss_fn(preds,batch)[0]
#backward()
if self.optimizer is not None and self.stage=="train":
self.accelerator.backward(loss)
self.optimizer.step()
if self.lr_scheduler is not None:
self.lr_scheduler.step()
self.optimizer.zero_grad()
all_preds = self.accelerator.gather(preds)
all_loss = self.accelerator.gather(loss).sum()
#losses
step_losses = {self.stage+"_loss":all_loss.item()}
#metrics
step_metrics = {}
if self.stage=="train":
if self.optimizer is not None:
step_metrics['lr'] = self.optimizer.state_dict()['param_groups'][0]['lr']
else:
step_metrics['lr'] = 0.0
return step_losses,step_metrics
KerasModel.StepRunner = StepRunner
keras_model = KerasModel(net = model,
loss_fn = loss_fn,
optimizer = optimizer)
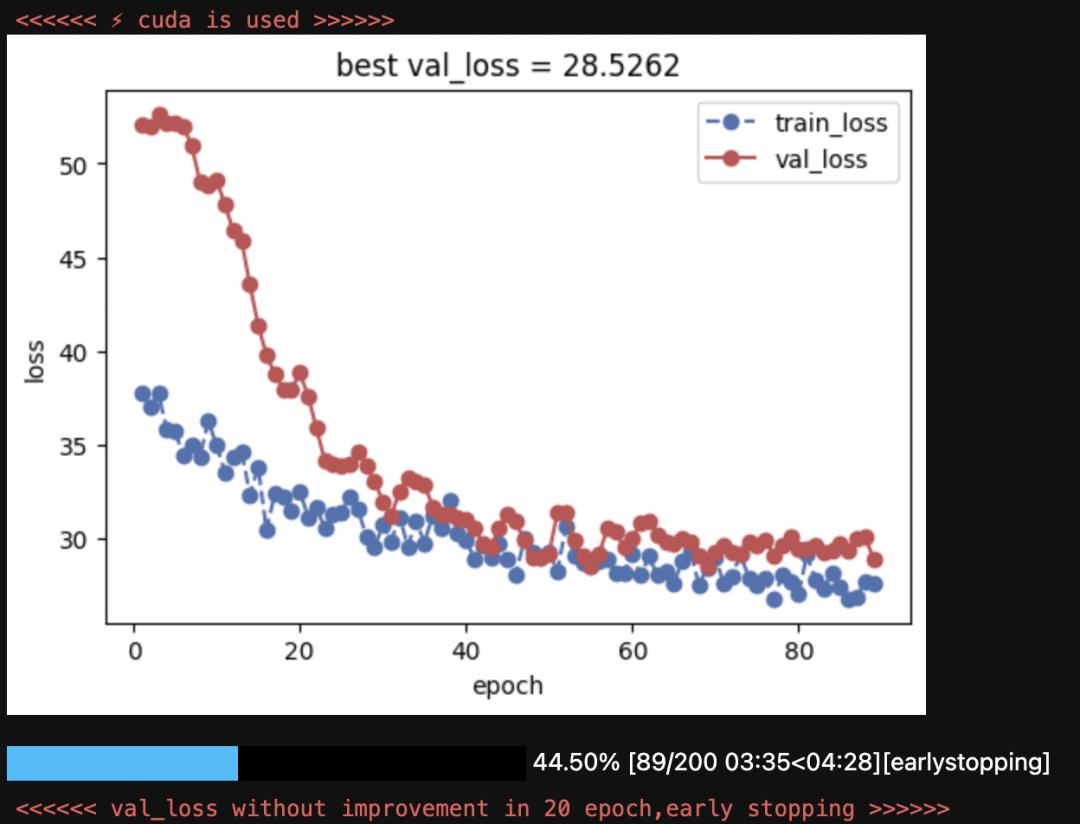
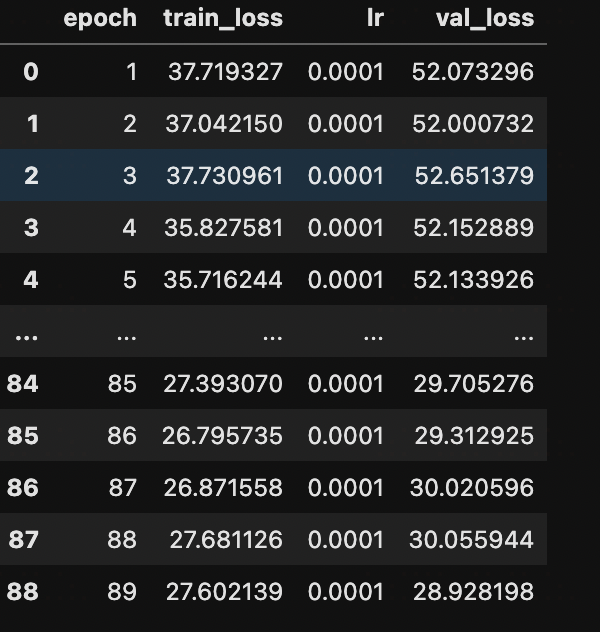
keras_model.fit(train_data=dl_train,
val_data=dl_val,
epochs = 200,
ckpt_path='checkpoint.pt',
patience=20,
monitor='val_loss',
mode='min',
mixed_precision='no',
plot= True,
wandb = False,
quiet = True
)
4. Модель оценки
Чтобы облегчить оценку карты и других показателей, мы снова сохраняем веса и используем собственный интерфейс YOLO Ultralytics для оценки после загрузки.
keras_model.evaluate(dl_val)
100%|██████████████████████████████████████████████████| 1/1 [00:00<00:00, 1.32it/s, val_loss=28.7]
{'val_loss': 28.715129852294922}
from ultralytics import YOLO
keras_model.load_ckpt('checkpoint.pt')
save_dic = dict(model = keras_model.net, train_args =dict(cfg))
torch.save(save_dic, 'best_yolo.pt')
from ultralytics import YOLO
best_model = YOLO(model = 'best_yolo.pt')
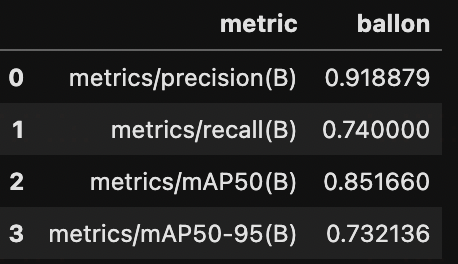
metrics = best_model.val(data = cfg.data )
metrics.results_dict
{'metrics/precision(B)': 0.9188790992746612,
'metrics/recall(B)': 0.74,
'metrics/mAP50(B)': 0.8516599658911874,
'metrics/mAP50-95(B)': 0.7321355695315829,
'fitness': 0.7440880091675434}
import pandas as pd
df = pd.DataFrame()
df['metric'] = metrics.keys
for i,c in best_model.names.items():
df[c] = metrics.class_result(i)
df
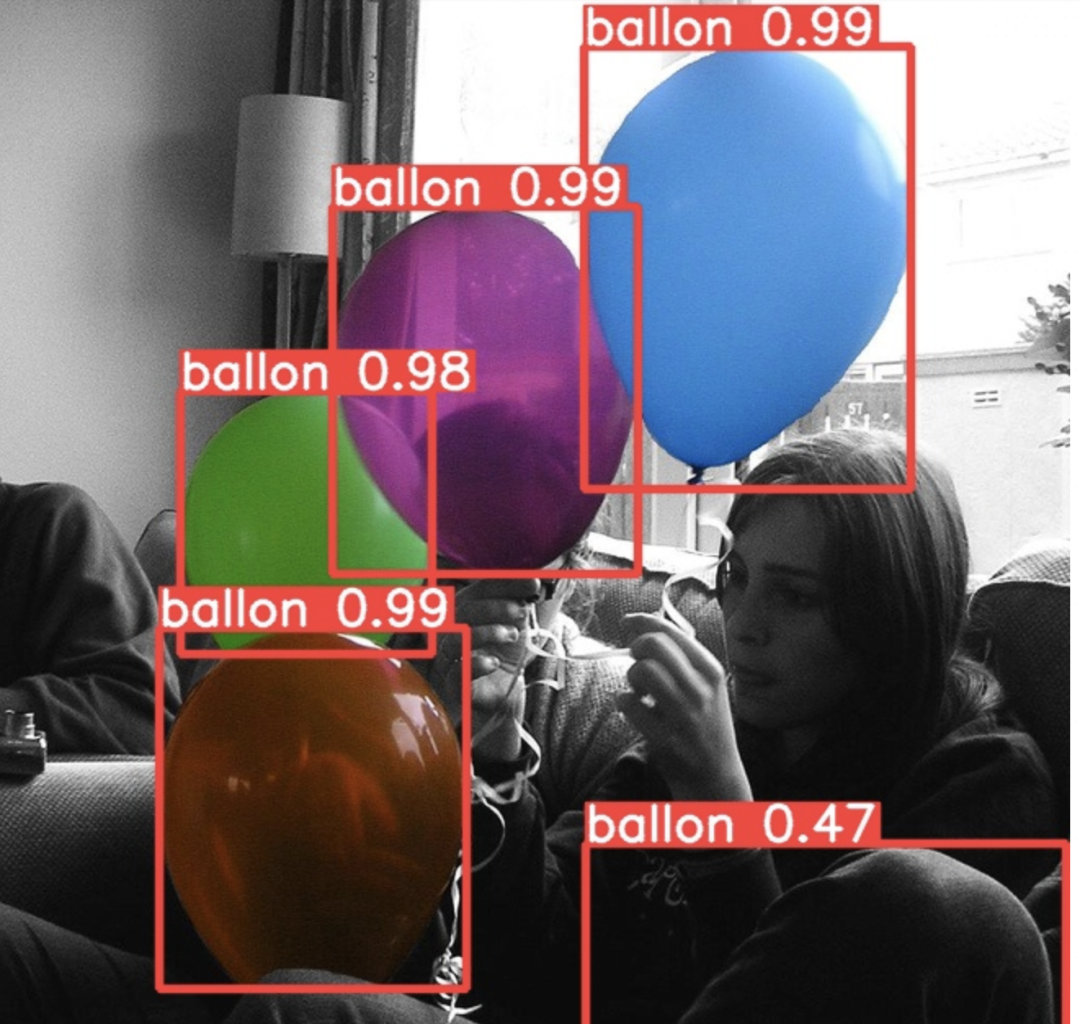
5. Используйте модель
from pathlib import Path
root_path = './datasets/balloon/'
data_root = Path(root_path)
best_model = YOLO(model = 'best_yolo.pt')
val_imgs = [str(x) for x in (data_root/'images'/'train').rglob("*.jpg") if 'checkpoint' not in str(x)]
img_path = val_imgs[5]
import os
from PIL import Image
result = best_model.predict(source = img_path,save=True)
best_model.predictor.save_dir/os.path.basename(img_path)
Image.open(best_model.predictor.save_dir/os.path.basename(img_path))
6. Экспортная модель
best_model.export(format='onnx')
from ultralytics.yolo.v8.detect.predict import DetectionPredictor
predictor = DetectionPredictor(
overrides=dict(model='best_yolo.onnx'))
results = list(predictor.stream_inference(source=img_path))



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
