Все в одной статье | Комплексный обзор новейших технологий автономного управления транспортными средствами 2023 года! (Оценка состояния/управление траекторией/приложение структуры и т. д.)
Управление транспортным средством Автономное Вождение Одна из наиболее важных проблем автомобильных, подключенных и автоматизированных транспортных средств имеет решающее значение с точки зрения безопасности транспортных средств, комфорта пассажиров, эффективности транспорта и энергосбережения. В этом обзоре предпринята попытка предоставить всесторонний и тщательный обзор текущего состояния технологий управления транспортными средствами, уделяя особое внимание Эволюция от оценки состояния транспортного средства и управления отслеживанием траектории на микроуровне к совместному управлению CAV на макроуровне. Первый старт с оценки критического состояния автомобиля,Особенно угол бокового скольжения автомобиля.,Это наиболее критическое состояние для управления траекторией автомобиля.,обсудить репрезентативные методы. Далее предлагается метод условного отслеживания траектории движения ЛА. кроме,Схема совместного контроля CAV и соответствующие процедуры также были дополнительно рассмотрены. Наконец, обсуждаются будущие направления исследований и проблемы. Целью этого опроса является получение более глубокого понимания новейших технологий в области управления транспортными средствами AV и CAV.,Определите ключевые направления,и определяет потенциальные области для дальнейших исследований.
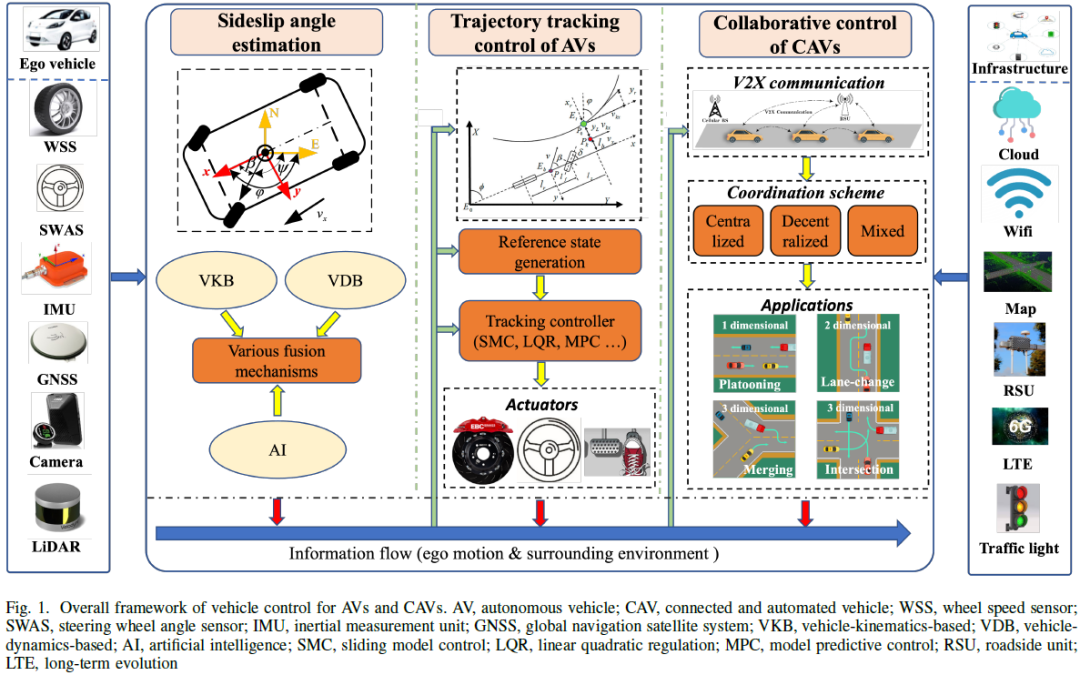
Общий план этой статьи показан на рисунке 1. В разделе 2 будут рассмотрены мультимодальные датчики, включая бортовые датчики, IMU, GNSS, камеры и лидары, в качестве входных данных для AV или CAV.,Принимая во внимание различные конфигурации датчиков и характеристики модели.,методы оценки состояния,Особенно угол бокового скольжения,Проведите расследование. Затем,В третьем разделе будут обсуждаться классическая физика транспортных средств и алгоритмы управления отслеживанием траектории беспилотных летательных аппаратов. также,Для совместного контроля CAV,Раздел 4. Вспомогательные технологии, ключ компоненты、Были исследованы методы и потенциальные приложения. Раздел 5 завершается комментариями о текущем состоянии и потенциальных областях будущих исследований.
Оценка угла бокового скольжения автомобиля
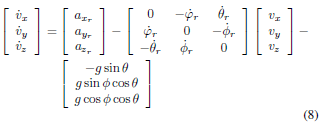
Информация о состоянии транспортного средства играет ключевую роль в планировании движения, принятии решений и технологии управления для AV и CAV. Состояния включают положение транспортного средства, скорость (продольную и поперечную скорость в координатах транспортного средства) и положение (крен, тангаж и рысканье транспортного средства). Рисунок 2 иллюстрирует определение вышеуказанного состояния, где верхние индексы n и b обозначают навигационные координаты и координаты тела соответственно. В поле навигации x, y и z указывают на восток, север и вверх, а в основном поле они указывают вперед, влево и вверх. Как показано в (1), точные знания продольной и поперечной скоростей необходимы для расчета угла бокового скольжения автомобиля, что имеет решающее значение для управления автомобилем. В то время как дорогое оборудование, такое как RT3000 и Kistler S-Motion,Некоторые из этих переменных состояния можно измерить,Но они невыполнимы для серийных автомобилей. поэтому,Многие ученые работали над оценкой угла бокового скольжения на реальных автомобилях. Следует отметить, что,Хотя оценка позиционирования/локализации AV и CAV входит в сферу оценки состояния AV и CaV.,Но это больше связано с сообществом навигации и картографии.,и были подробно и всесторонне рассмотрены в [52-55]. Для того, чтобы этот обзор был посвящен интересам сообщества, занимающегося управлением транспортными средствами.,В этой статье основное внимание уделяется оценке состояния транспортного средства.,То есть оценка угла скольжения. в другом аспекте,Оценка угла бокового скольжения эквивалентна оценке угла курса.,Это одно из самых критичных состояний в навигационной системе. Связь между углом скольжения и курсовым углом была выявлена в [32],Как показано ниже:

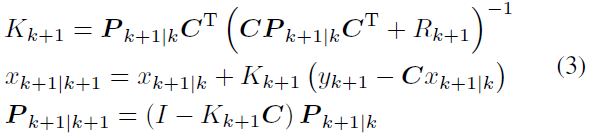
В настоящее время конструкция оценки состояния транспортного средства состоит в основном из фильтра Калмана и нелинейного наблюдателя. KF широко используется благодаря своей простоте и надежности. Они состоят из двух этапов: этапа прогнозирования и этапа коррекции. На этапе прогнозирования производятся оценки переменных текущего состояния и их неопределенностей. Когда поступает измерительный сигнал, оцененные переменные корректируются на этапе коррекции. Этап прогнозирования можно описать уравнением (2):

Фаза калибровки описывается следующим образом:
Однако использование стандартного ФК для оценки состояния в высокодинамичных условиях неоптимально. Чтобы преодолеть это ограничение, некоторые исследователи предложили варианты KF для улучшения его производительности. В качестве альтернативы другие разработали нелинейные наблюдатели для оценки состояний транспортных средств, принимая во внимание сильную нелинейность динамических моделей транспортных средств в экстремальных условиях вождения. В отличие от KF, для нелинейных наблюдателей не существует фиксированной парадигмы проектирования. В частности, коэффициент обратной связи рассчитывается путем построения тонкой функции Ляпунова и ограничения производной функции меньшим нуля [57].
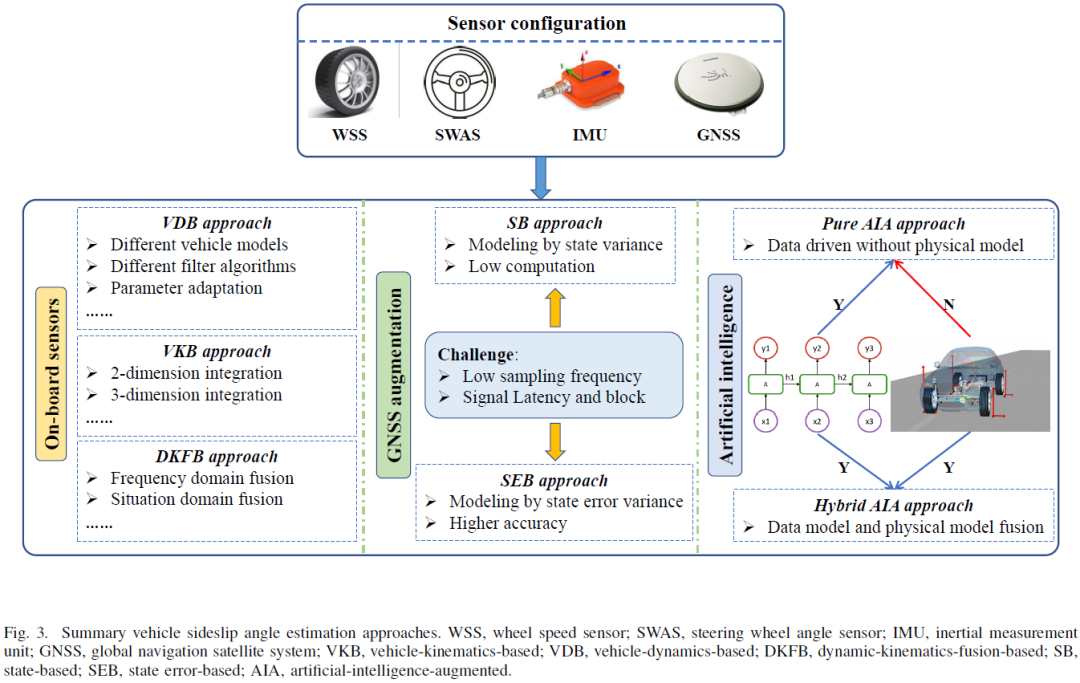
На рисунке 3 представлена оценка угла бокового скольжения Подробная классификация автомобилей. Вообще говоря, его можно разделить на три основных метода: метод OSB, метод ГАУиметод АИА. Методы OSB можно разделить на три типа: метод на основе кинематики транспортного средства (VKB), метод на основе динамики транспортного средства (VDB) и метод на основе динамической кинематики (DKFB). метод ГАУ можно разделить на методы, основанные на состоянии (SB) и методы, основанные на состоянии ошибки (SEB). метод АИА также можно разделить на смешанный метод. АИАичистыйметод АИА。
OSB approach
Бортовые датчики, такие как SWAS, WSS и IMU, имеют решающее значение для обеспечения безопасной эксплуатации автомобиля. Исследователи разработали различные математические модели, которые используют входные данные от этих датчиков для оценки угла бокового скольжения автомобиля в режиме реального времени. Эти комплексные методы оценки можно разделить на три основных типа: метод VDB, метод VKB и метод DKFB. В следующих разделах каждый из этих методов будет описан подробно.
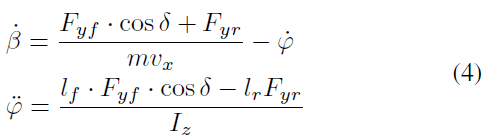
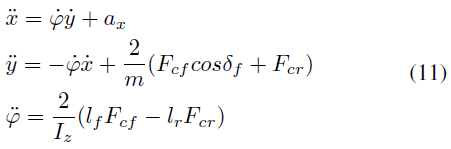
1) Метод VDB: учитывая относительно низкую зависимость динамики автомобиля от точности датчика.,за последние двадцать лет,В промышленности и научных кругах было проведено множество исследований по динамике транспортных средств на основе динамики транспортных средств. Эффективность метода VDB во многом связана с надежностью динамики автомобиля. Модель. поэтому,Степени свободы (DOF), дорожное трение, нелинейные характеристики шин и неопределенности в параметрах транспортного средства будут влиять на точность алгоритма оценки. Чтобы облегчить обзор подхода VDB,В этой статье в качестве примера для описания состояния движения транспортного средства используется классическая модель динамики транспортного средства. Модель транспортного средства с двумя степенями свободы можно записать следующим образом:
На основе классической динамики автомобиля. Модель и ее варианты.,Было предложено большое количество методов VDB и различных оценок. в,Расширенный фильтр Калмана(EKF)метод был значительнососредоточиться да, многие исследования это доказывают. Когда шины транспортного средства достигают крайних нелинейных областей, линеаризация первого порядка, используемая в EKF, может быть недостаточно точной для оценки состояния. Напротив, фильтр Калмана без запаха (UKF) может быть применен непосредственно к нелинейной модели и использует набор сигма-точек для оценки состояния, чтобы избежать локальной линеаризации, что делает оценку угла бокового скольжения автомобиляподходящий метод。как упоминалось выше,Метод VDB требует параметров транспортного средства. Однако,определенные параметры,Например, центр тяжести и жесткость шины на поворотах.,Сильно зависит от условий вождения и нагрузки. Неопределенность этих параметров может привести к ошибкам оценки.,Это может даже привести к тому, что оценщик не сможет сходиться.
2) Метод VKB: ввиду недостатков неточных моделей транспортных средств, особенно в критических условиях вождения, некоторые ученые предпочитают отказаться от метода VDB и вместо этого использовать информацию датчиков транспортных средств, таких как IMU, WSS и SWAS, для разработки метода VKB. . Доминирующую модель кинематики транспортного средства с 2 степенями свободы в плоскости можно выразить следующим образом:

Путем прямого интегрирования [77] угол бокового скольжения можно получить следующим образом:

К сожалению, этот подход может привести к ошибкам интегрирования и, в тяжелых случаях, даже к смещенным оценкам. Чтобы устранить вышеуказанные проблемы, Ким и др. разработали EKF для оценки угла бокового скольжения транспортного средства с учетом изменяющихся во времени изменений продольной и поперечной скорости. Однако авторы не уточнили, как были получены измеренные продольная и поперечная скорости для коррекции по обратной связи. Чтобы правильно обрабатывать измерения IMU и исключить нежелательные эффекты, Селманадж и др. учитывают продольную скорость транспортного средства, смещение датчика, угол крена транспортного средства и ускорение центра тяжести.
На основании приведенной выше литературы очевидно, что метод ВКБ опирается на IMU в качестве основного датчика. Несмотря на это, выходной сигнал IMU чувствителен к температурному дрейфу, ошибкам смещения, случайному шуму и компонентам гравитации, возникающим из-за углов крена и тангажа. Чтобы точно получить скорость путем интегрирования ускорения датчика, крайне важно удалить компоненты смещения, шума и гравитации. В противном случае длительное время интегрирования может привести к накоплению ошибок.
3) Метод ДКФБ: Поскольку и методы ВДБ, и ВКБ имеют ограничения, вопрос о том, как объединить их в дополнительный метод ДКФБ, остается открытым. Согласно [81], метод VDB показывает более высокую достоверность на низких частотах, тогда как метод VKB работает лучше на высоких частотах. Следовательно, для интеграции методов VKB и VDB можно использовать фильтр первого порядка. Результаты слияния следующие:

По мере того, как сенсорные технологии становятся все более совершенными, сигналы ускорения и угловой скорости, получаемые IMU, постепенно преобразуются из двухмерной плоскости в трехмерное пространство. Это улучшение позволяет установить взаимосвязь между вращением и перемещением транспортного средства в трех измерениях. Соответствующую модель можно выразить следующим образом:
Используя приведенную выше информацию, можно выделить ускорение, возникающее в результате гравитационной составляющей изменения положения. Благодаря этой мотивации Ся и др. объединили трехмерные оценки, чтобы получить угол бокового скольжения автомобиля. При меньших условиях возбуждения метод VDB помогает методу VKB оценить угол скольжения, тогда как при более сильных возбуждениях оценка угла скольжения будет зависеть только от метода VKB. Кроме того, Сюн и др. предложили новый метод DKFB, который учитывает плечо рычага между IMU и COG в зависимости от условий движения. Предлагаемая архитектура состоит из следующих четырех оценщиков: оценок поперечной и продольной скорости для метода VDB и оценок ориентации/скорости для метода VKB. Условия движения определяют механизм слияния. Что еще более важно, метод VDB можно использовать в качестве сигнала обратной связи для метода VKB, когда транспортное средство находится в нормальных условиях движения. Однако в критических условиях движения метод VDB отключается и для оценки угла увода автомобиля используется только метод VKB. Работоспособность предложенного способа проверяют посредством смены полосы движения и маневров поворота.
метод ГАУ
Поскольку AV и CAV продолжают развиваться,Теперь доступно больше датчиков, предоставляющих входную информацию для эффективной оценки состояния.,Включает в себя GNSS, камеры и лидар. Поскольку система глобальных навигационных спутников обычно используется в самолетах и CAV по низкой цене.,Поэтому были проведены обширные исследования по оценке угла скольжения транспортного средства с использованием метода ГАУ.,Этот метод включает информацию о положении и скорости глобальной навигационной спутниковой системы в навигационные координаты. По характеристикам переменных в уравнении состояния,Эти методы можно разделить на следующие две категории: методы SB и методы SEB.
1) Метод SB: метод SB напрямую зависит от состояния переменной в модели. Преимущества этого подхода заключаются в простоте проектирования и вывода, а также в относительно низких вычислительных требованиях. Поэтому он широко используется для оценки состояния транспортного средства. Наетс и др. предложили EKF, который использует боковую скорость, угловую скорость рыскания, продольную скорость и жесткость шины на поворотах в качестве векторов состояния для оценки угла бокового скольжения транспортного средства. Они также проанализировали четыре типа измерений коррекции обратной связи, включая скорость рыскания, поперечное ускорение, скорость четырех колес и скорость GNSS. Кроме того, Катринок и др. оценивают локальную наблюдаемость предполагаемой структуры с помощью горизонтальных скоростей на основе данных ГНСС.
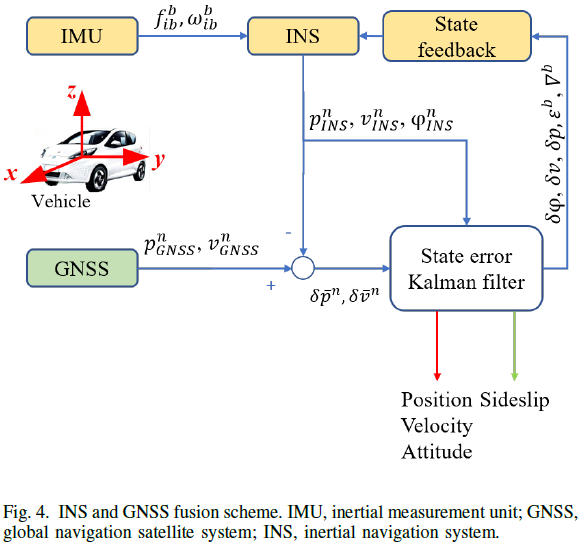
2) Метод СЭБ: несмотря на СБ и метод ГАУУвеличена точность определения угла скольжения.,Но они до сих пор не могут точно оценить смещение гироскопов и акселерометров. Чтобы смягчить вышеуказанные ограничения,Некоторые ученые также приняли альтернативную стратегию объединения GNSS и IMU.,метод СЭБ,Способ основан на рамке инерциальной навигационной системы (ИНС). По сравнению с методом SB,Метод SEB повышает точность и надежность оценки позы. Преимущество метода SEB заключается в том, что,Они используют ошибки состояния (например.,Позиция, скорость и положение),Вместо прямого использования вектора состояния. Это приводит к ошибке, близкой к исходной.,Избегаются такие проблемы, как блокировка подвеса и сингулярные параметры. Пример ИНСрамки для оценки угла скольжения показан на рисунке 4.
метод АИА
за последние десять лет,Технологии искусственного интеллекта достигли значительного прогресса. Это развитие побудило некоторых исследователей применить искусственный интеллект к искусственному интеллекту., используя подход, основанный на данных, который сочетает в себе данные от мультимодальных датчиков. Этот метод можно разделить на две категории: чистый метод АИАисмешиваниеметод АИА。
1)чистыйметод АИА: Чистый подход AIA предполагает реализацию оценки полностью посредством сквозного процесса, управляемого данными. угла бокового скольжения автомобиля,Вместо того, чтобы полагаться на традиционную модельную математику. Лю и др. разработали нейронную сеть с задержкой.,Угол бокового скольжения автомобиля оценивается с использованием входных данных, таких как угол поворота рулевого колеса, поперечное ускорение, скорость рыскания и скорость колес. Три искусственные нейронные сети были построены Bonditto et al.,Вернуть угол бокового скольжения при трех дорожных условиях: сухом, мокром и обледенелом. Предполагаемый результат корректируется через сеть классификаторов трафика. Лю и др. предложили нелинейную авторегрессионную нейронную сеть для оценки угла скольжения транспортного средства. путем сравнительного исследования,Предложенный метод показывает хорошие результаты при любых условиях вождения.
2)смешиваниеметод АИА: гибридные методы AIA, сочетающие в себе кинематическую или динамическую математическую модель с технологией искусственного интеллекта, становятся все более популярными при оценке углов бокового скольжения транспортных средств. Например, Ким и др. использовали длинную кратковременную память (LSTM) для оценки угла бокового скольжения транспортного средства и его неопределенности с помощью угловой скорости рыскания, угла рулевого колеса и бокового ускорения. Выходные данные LSTM используются в качестве входных данных для динамической модели EKF/UKF для повышения производительности оценки угла скольжения. Аналогично, Нови и др. интегрировали искусственные нейронные сети с UKF на основе модели кинематики для оценки угла бокового скольжения. с чистым методом По сравнению с АИА гибридный метод может в определенной степени улучшить интерпретируемость метода оценки.
Приведенное выше исследование подчеркивает, что оценка угла бокового скольжения имеет решающее значение не только для управления отслеживанием траектории самолета, но и для навигации самолета, что имеет решающее значение для связи между CAV. Таким образом, точная оценка угла бокового скольжения важна как для AV, так и для CAV.
Управление отслеживанием траектории беспилотных транспортных средств
Управление отслеживанием траектории транспортного средства является ключевым и фундаментальным компонентом AV, способным рассчитывать команды прямой оптимизации, такие как угол поворота рулевого колеса, открытие дроссельной заслонки и педаль тормоза, чтобы заменить водителя и помочь ему. В модуле управления он гарантирует, что автомобиль точно следует заданному маршруту, избегая препятствий и поддерживая безопасные условия вождения. Поэтому алгоритмы обратной связи на микроуровне или самообучающиеся алгоритмы управления отслеживанием предназначены для регулировки скорости, ускорения и рулевого управления транспортного средства для следования по желаемой траектории. Обычно алгоритмы учитывают динамику и кинематику транспортного средства для определения оптимальных управляющих входов. Эти входные данные корректируются в режиме реального времени с учетом любых неопределенностей или нарушений в среде, в которой находится транспортное средство, таких как изменения дорожных условий, транспортного потока или наличия препятствий.
В настоящее время многие учреждения, производители автомобилей и поставщики компонентов в области AV придают большое значение разработке алгоритмов управления отслеживанием. Эти алгоритмы в основном делятся на следующие три типа: 1) управление с обратной связью без прогнозирования (например, пропорционально-интегрально-дифференциальное (ПИД), линейно-квадратичный регулятор (LQR) и скользящее управление (SMC)); 2) управление с обратной связью с прогнозированием; (например, модельное прогнозирующее управление (MPC)); и 3) управление на основе обучения, такое как глубокое обучение с подкреплением. Общая структура показана на рисунке 5.
Математическая модель автомобиля
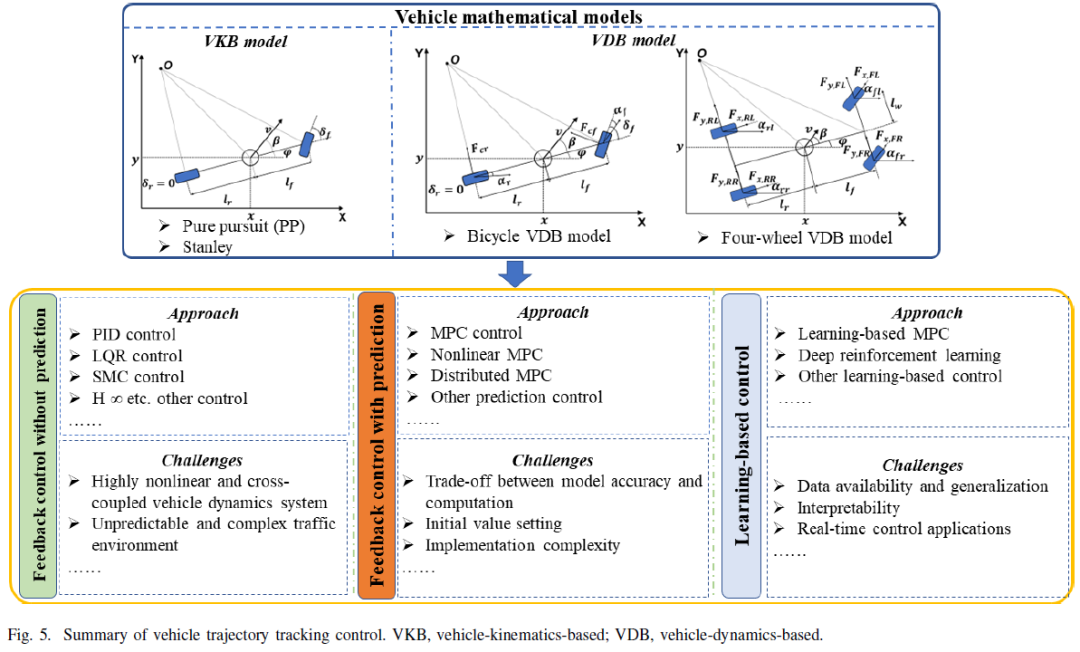
Управление траекторией движения АВ предполагает использование различных моделей транспортных средств, которые обычно делят на три типа: модель ВКБ, модель велосипеда ВДБ и четырехколесная модель ВДБ. Различные модели имеют свои собственные применимые сценарии.
ВКБМодель широко используется.,Потому что он может напрямую установить взаимосвязь между боковой/курсовой ошибкой и углом поворота. в целом,Метод чистого преследования (PP) используется для расчета боковой ошибки на фиксированном расстоянии впереди транспортного средства по желаемому пути. в целом,Точкой привязки автомобиля для этого метода является центр задней оси. Соответствующая модель выглядит следующим образом:
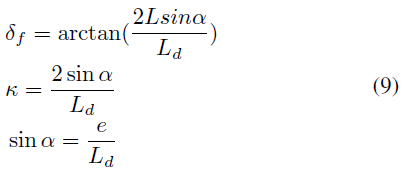
Приведенное выше уравнение учитывает только боковую ошибку и игнорирует ошибку курса, которая также имеет решающее значение для обеспечения оптимального отслеживания траектории. Для решения этой проблемы был разработан метод Стэнли, учитывающий как боковые, так и курсовые ошибки. Более конкретно, боковая ошибка определяется как расстояние между ближайшей точкой пути и передней осью транспортного средства. Угол поворота можно найти по следующей формуле:

Хотя модель ВКБ широко используется для контроля траектории движения автомобиля, она игнорирует такие ошибки, как проскальзывание шин, что очень важно для критических условий движения. Чтобы уменьшить вышеуказанные ошибки, многие ученые также используют модель VDB для построения алгоритмов управления отслеживанием траектории транспортных средств. Вот пример широко используемой велосипедной модели VDB. Формула выглядит следующим образом:
Для дальнейшего повышения точности модели автомобиля,Некоторые ученые также используют четырехколесную модель VDB. Однако,Повышенная точность также приведет к увеличению сложности и вычислительных затрат Модели. поэтому,Выбор Математической модели автомобиля в конечном итоге зависит от нескольких факторов.,Включает сценарии вождения, точность и сложность.
Нет алгоритма управления с прогнозирующей обратной связью
Алгоритмы управления с обратной связью без прогнозирования обычно используют явную теорию управления, такую как методы PID, LQR и SMC. Эти технологии обеспечивают надежное отслеживание колеи в большинстве условий вождения.
1) ПИД-регулирование: ПИД-регулирование слежения за траекторией — это метод, широко используемый в промышленности.,Потому что это просто и эффективно для управления отслеживанием траектории самолета. Парк и др. улучшили точность управления отслеживанием траектории AV за счет использования алгоритма пропорционально-интегрального (PI) управления.,Этот алгоритм минимизирует ошибку бокового расстояния. Пропорциональный выигрыш алгоритма остается прежним,А интегральный коэффициент меняется в зависимости от кривизны дороги. Сходным образом,На основе PPМодель Chen et al.,Алгоритм ПИ-управления и фильтр нижних частот используются для повышения плавности отслеживания траектории.
в целом,ПИД-регулятор представляет собой относительно простой алгоритм управления.,Может быть реализован в AV,и может быть легко запрограммирован в микроконтроллер или встроенную систему,Для достижения промышленного приложения. Однако,ПИД-управление отслеживанием траектории часто сталкивается с трудностями при настройке коэффициента усиления обратной связи. Когда условия вождения в реальных условиях значительно меняются,в некоторых случаях,Параметры управления могут перестать быть оптимальными. Хотя многие ученые исследовали методы адаптивного ПИД-регулирования и самообучающегося ПИД-регулирования.,Однако адаптивная и автоматическая настройка параметров по-прежнему сложна и требует много времени. также,Достижение удовлетворительных характеристик управления с помощью ПИД-регулирования в сложных условиях движения остается сложной задачей.
2) Контроль LQR. Чтобы смягчить вышеуказанные ограничения, некоторые ученые также используют метод LQR для контроля слежения за транспортными средствами. Целью этого метода является минимизация квадратичной функции стоимости J, как показано в (12). Коэффициент усиления обратной связи решается с помощью соответствующего уравнения Риккати.

Поскольку LQR — это управление с обратной связью по состоянию, K — коэффициент усиления обратной связи, полученный методом вариаций, как описано в следующем уравнении:

где матрица P является решением уравнения Риккати и определяется формулой:

Как правило, метод LQR подходит для оптимизации линейных систем, где параметры Q и R необходимо отрегулировать для обеспечения сходимости и стабильности системы. Для управления отслеживанием траектории транспортного средства метод LQR обычно разрабатывается на основе модели VDB. Пиао и др. предложили управление отслеживанием оптимальной траектории LQR с помощью велосипедной модели VDB и оптимизировали весовые матрицы Q и R, используя алгоритм стохастической аппроксимации одновременных возмущений.
Основываясь на приведенном выше исследовании, метод LQR может обеспечить оптимальное решение для управления, которое минимизирует функцию стоимости, что может обеспечить превосходную производительность отслеживания за счет онлайн- или офлайн-оптимизации. В частности, многие исследователи используют метод LQR с LMI для достижения сходимости управления посредством типичной конструкции функции Ляпунова. Однако LQR-управление не подходит для систем с большими управляющими входами, поскольку предполагает, что управляющие входы малы и не вызывают значительных отклонений от желаемой траектории. Таким образом, в некоторых критических условиях вождения, таких как значительная кривизна дороги или низкое сцепление с дорогой, эффективность управления отслеживанием траектории может ухудшиться, что приведет к ухудшению надежности. Кроме того, хотя управление отслеживанием LQR может работать с нелинейными системами путем линеаризации динамики вокруг желаемой траектории, линеаризация сильно нелинейных и быстро меняющихся во времени моделей транспортных средств может привести к искажению модели. Поэтому, возможно, потребуется изучить более передовые технологии для автомобильных систем.
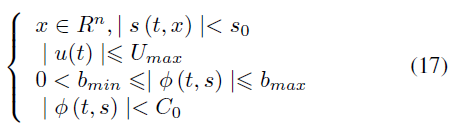
3) Управление SMC. Чтобы решить проблему предположения линеаризации в LQR, SMC вводится в управление отслеживанием траектории AV. SMC — это надежный метод управления нелинейными системами с неопределенностью параметров и внешними возмущениями. Задача при реализации SMC состоит в том, чтобы разработать сверхскрученную плоскость, обеспечивающую надежную устойчивость и уменьшающую вибрацию. Системные функции SMC следующие:

Тогда скользящая переменная s с производной выражается следующим образом:

Управление отслеживанием траектории в режиме скольжения направлено на то, чтобы заставить систему сходиться на поверхности скольжения, определяемой как s = 0. И должны быть соблюдены следующие условия:
Таким образом, SMC можно задать следующим образом:

Согласно модели VDB модель ошибок выражается следующим образом:

Поскольку SMC нечувствителен к неопределенности модели, он стал популярным нелинейным методом управления отслеживанием траектории самолета, а модель VDB широко используется для описания движения самолета. Акерми и др. использовали нечеткую систему для автоматической регулировки усиления SMC для компенсации изменений параметров системы. Дай и др. предложили объединить SMC с оптимизацией роя частиц (PSO) для повышения надежности управления отслеживанием траектории самолета. Подробно автор разработал алгоритм управления отслеживанием траектории рулевого управления на основе SMC для устранения боковых и курсовых ошибок. Однако неподходящие поверхности скольжения могут вызвать колебания системы.
в общем,SMC — это практический метод управления, который очень подходит для нелинейного управления. Это связано с тем, что SMC основан на концепции скользящего режима.,Скользящий режим — это когда переменная процесса вынуждена двигаться по заранее заданной траектории. в то же время,По сравнению с другими технологиями управления,SMC меньше зависит от параметров Модели.,Делает ее более устойчивой в присутствии неопределенностей и возмущений модели. к сожалению,Отскок вблизи скользящих поверхностей остается проблемой,Особенно в режиме реального времени приложение. также,Когда сигнал связи плавный и непрерывный,SMC более эффективен. Если сигнал ссылки неровный,Например, дорожное покрытие неровное.,Это может привести к высокочастотным колебаниям на управляющем входе. поэтому,Более сложная динамика Модель должна быть спроектирована путем увеличения степеней свободы. Чтобы обойти эти ограничения,Исследователи также предложили гибридные схемы управления, сочетающие SMC с другими методами управления, такими как PID или LQR.
4) Другие методы управления: кроме PID, LQR и SMC.,Исследователи также разработали некоторые другие методы управления для улучшения характеристик отслеживания траектории самолета. К таким методам относятся H-бесконечность, адаптивное и нечеткое управление. В методе H-бесконечности,Решая задачу оптимизации с использованием уравнения Риккати,Минимизируйте норму H-бесконечности системы. Ху и др. предложили надежную стратегию управления с обратной связью по выходу H-бесконечности.,Эта стратегия использует гибридный генетический алгоритм/подход линейного матричного неравенства.,Устойчив к внешним воздействиям и неопределенности параметров окружающей среды.
Хотя управление с обратной связью без прогнозирования и другие алгоритмы управления за последние несколько лет добились значительного прогресса. Сильно нелинейные и перекрестно связанные системы динамики транспортных средств, а также непредсказуемые и сложные условия дорожного движения по-прежнему затрудняют надежное управление отслеживанием траектории самолетов.
Алгоритм управления с обратной связью и прогнозированием
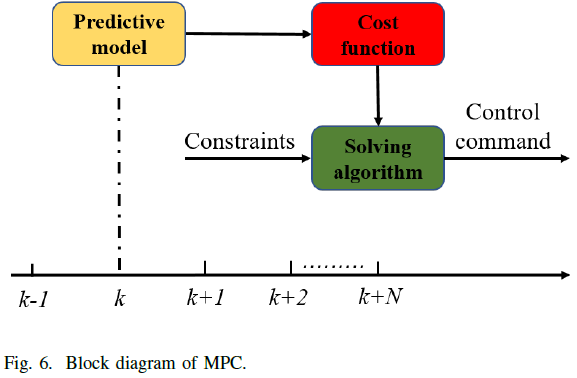
MPC - популярный метод управления отслеживанием траектории.,Потому что он может решить проблему оптимизации, вводя различные ограничения и диапазоны прогнозирования. Общая блок-схема представлена на рисунке 6. Отличие от LQR,MPC может использовать горизонты прогнозирования для прогнозирования будущего поведения.,и решать задачи оптимального управления с разомкнутым контуром ограниченного диапазона. Оптимальная последовательность управления рассчитывается за серию дискретных шагов по времени путем минимизации функции стоимости. Весь процесс итеративно повторяется,И к транспортному средству подается только первый управляющий вход. также,MPC учитывает возмущения в виде определенных ограничений,для повышения прочности и стабильности. поэтому,MPC всегда корректирует Модель процесса, делая это с более высокими вычислительными затратами, чем классические методы управления отслеживанием траектории.,Таким образом, требуется интуитивная параметризация.
Модель пространства состояний MPC выглядит следующим образом:

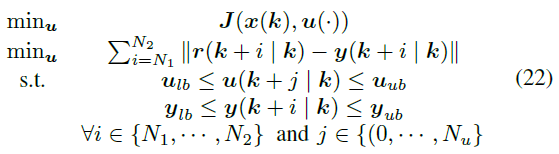
MPC минимизирует определяемую пользователем функцию стоимости J, такую как ошибка отслеживания траектории между желаемым путем r и выходными данными модели y.
Несколько недавних исследований продемонстрировали особые характеристики MPC при управлении траекторией самолета. В основном они сосредоточены на улучшении его производительности в следующих трех ключевых областях: повышение осуществимости задач оптимизации в разомкнутом контуре (например, за счет повышения точности модели), улучшение стабильности управления отслеживанием траектории в замкнутом контуре (например, за счет более точного прогнозирования и процессы управления), а также повышенную надежность в условиях неопределенности, например, в экстремальных условиях вождения. Что касается осуществимости, Чу и др. предложили управление MPC с обратной связью, которое использует характеристики динамического отслеживания и отслеживания траектории, чтобы сократить время вычислений и усилия, необходимые для настройки параметров. Объединив MPC с PID, они стремились минимизировать ошибки, вызванные упрощением модели. Результаты экспериментов и моделирования демонстрируют эффективность предлагаемого метода.
MPC обеспечивает оптимальное решение управления, которое сводит к минимуму критерии производительности в ограниченном диапазоне.,По сравнению с другими технологиями управления,Это приводит к превосходной производительности отслеживания. с другой стороны,MPC может прогнозировать будущие состояния и рассчитывать оптимальные управляющие входы в безопасных пределах, используя модель нелинейности системы.,Таким образом, мы имеем дело с нелинейностями и ограничениями. Однако,Они все еще сталкиваются с некоторыми проблемами,Такие как недостатки точности, ограничения диапазона прогноза и сложность вычислений.,Это усложняет создание приложения в реальном времени. также,в реальных условиях,Имеются задержки сигналов от датчиков и исполнительных устройств. Однако,MPC чувствителен к задержкам в системе,Это может повлиять на точность прогнозирования и эффективность управления. Еще одна проблема связана с установкой начальных значений во время оптимизации ускорения. Если начальное значение не подходит,оптимизация может не удаться или занять много времени,Время расчета каждого шага непредсказуемо.
Алгоритм управления на основе обучения
Для решения вышеуказанных задач существует несколько методов оптимизации управления MPC на основе методов обучения. Один из методов заключается в использовании алгоритма MPC на основе выборки, который использует простую стратегию выборки управляющей последовательности. Другой подход заключается в прогнозирующем управлении самообучающейся моделью, которое ближе к оптимальной скорости управления на основе известных параметров. Кроме того, понимание теории обучения MPC посредством конкурентного контроля может помочь оптимизировать процесс.
также,Из-за сильной нелинейности и неопределенности в AV,Разработка точной модели автомобиля — непростая задача]. Чтобы преодолеть эту проблему,Алгоритм управления на основе обучениябыл широко исследован,Поскольку они не зависят от конкретной модели,Может решить сложную нелинейную систему управления. Глубокое обучение с подкреплением стало потенциальным решением ограничений современных алгоритмов управления отслеживанием траектории AV.
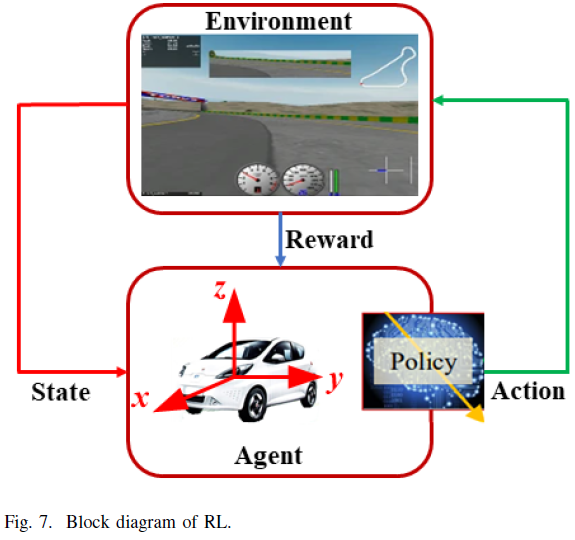
При реализации алгоритмов глубокого обучения с подкреплением AV изучает оптимальные стратегии управления, взаимодействуя с окружающей средой и используя собранные данные, как показано на рисунке 7. Чтобы преодолеть проблемы существующих алгоритмов управления отслеживанием траектории, Чжао и др. предложили алгоритм оптимального управления, основанный на обучении, который аппроксимирует сети критиков и актеров с помощью двух многослойных нейронных сетей.
Конечно, алгоритмы глубокого обучения с подкреплением имеют ограничения, в том числе необходимость в больших объемах обучающих данных, возможность переобучения и сложность интерпретации внутренней работы модели. Несмотря на проблемы, область глубокого обучения с подкреплением быстро расширяется с появлением новых технологий и алгоритмов, предназначенных для расширения его возможностей.
В дополнение к вышеупомянутым методам обучения Лю и др. также представили новый алгоритм адаптивного управления на основе обучения (MFAC). Алгоритм основан на методе двойной непрерывной проекции (DuSP)-MVAC и использует недавно представленный метод DuSP и симметрично аналогичную структуру управления отслеживанием траектории MFAC и структуру оценки параметров. Используя угол отклонения предварительного просмотра, проблема отслеживания траектории превращается в проблему стабилизации. Ван и др. разработали новую адаптивную систему управления отслеживанием траектории транспортного средства на основе данных, инновационно сочетая поиск экстремальных значений и управление на основе обучения. Шарма и др. использовали сквозное обучение в открытом гоночном симуляторе (TORCS) для обучения двух разных нейронных сетей прогнозированию скорости и рулевого управления автомобиля на основе траекторий дороги. Результаты показывают, что управление отслеживанием траектории эффективно работает на двух траекториях, несмотря на ограниченность доступных обучающих данных.
В целом, алгоритмы управления отслеживанием траектории самолета были подробно рассмотрены на микроскопическом уровне. Выбор подходящего алгоритма зависит от особенностей управления отслеживанием траектории транспортного средства и требований к его производительности.
Совместный контроль CAVS
Самолеты, оснащенные такими датчиками, как камеры, радары и лидары, являются ключевыми компонентами интеллектуальных транспортных систем. Однако, несмотря на передовую сенсорную технологию беспилотных летательных аппаратов, не всегда возможно полностью надежно воспринимать динамические и переменные условия с использованием только бортовых датчиков из-за таких факторов, как неблагоприятные погодные условия, неопределенности датчиков или модели транспортного средства, а также изменения освещения.
К счастью, сочетание Интернета вещей и искусственного интеллекта привело к значительному прогрессу в интеллектуальных транспортных системах. Эти технологии позволяют соединить различных участников транспорта, включая транспортные средства, светофоры, людей и инфраструктуру, для повышения эффективности транспорта, сокращения выбросов и предотвращения аварий. Эти агенты, особенно CAV, сотрудничают посредством связи V2X, чтобы расширить свои возможности принятия решений и сделать транспортную систему более эффективной и устойчивой. С этой целью, чтобы решить ограничения AV, совместный контроль CAV стал многообещающей технологией в ITS. Технология совместного управления предполагает обмен информацией как внутри, так и за пределами прямой видимости, чтобы обеспечить скоординированное принятие решений между CAV, тем самым снижая вероятность аварий и повышая общую эффективность движения, комфорт и экономичность в типичных сценариях дорожного движения. Эта технология вызвала значительный интерес благодаря ее способности оптимизировать возможности управления транспортным средством на относительно большом расстоянии по сравнению с другими CAV.
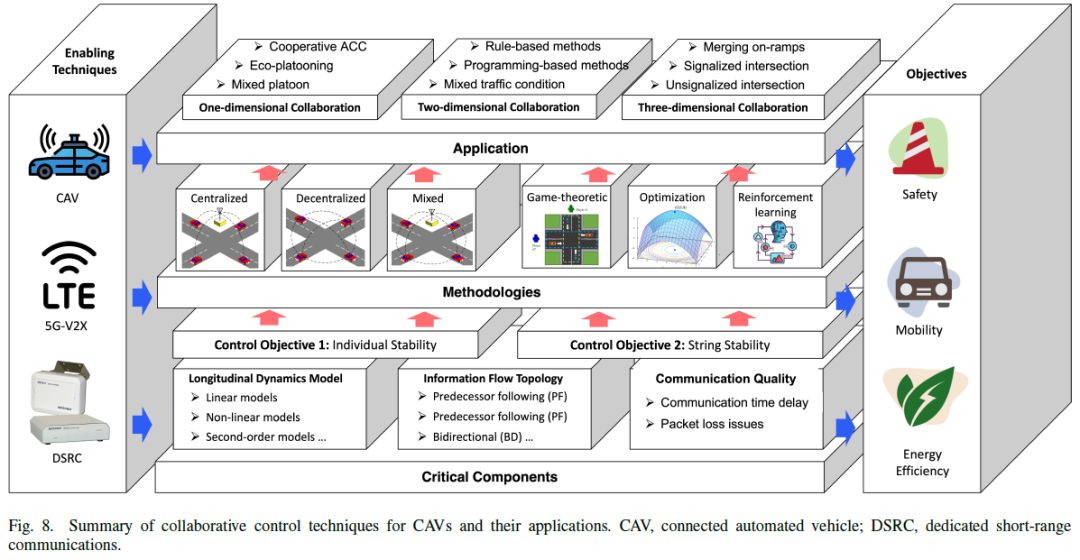
В этом разделе мы исследуем передовые технологии, методы совместного управления и потенциал технологий совместного управления в CAV. Каркас этого сечения показан на рисунке 8.
Доступные технологии
Совместное управление CAV основано на V2V и V2I, что позволяет нескольким CAV координировать свои движения и обмениваться информацией об их скорости, местоположении и пункте назначения. Некоторые продвинутые системы также обмениваются визуальной информацией, включая обнаруженные ограничивающие рамки и промежуточные нейронные функции. Эта технология обеспечивает более плавный транспортный поток, уменьшает заторы и повышает безопасность дорожного движения, облегчая синхронизацию таких факторов, как ускорение, торможение и прохождение поворотов. Одним из основных преимуществ совместного управления является оптимизация транспортного потока за счет уменьшения необходимости торможения и ускорения, что позволяет экономить топливо, снижать выбросы и повышать энергоэффективность. Еще одним преимуществом является уменьшение количества пробок и столкновений, что приводит к сокращению времени в пути, меньшему износу транспортных средств и снижению эксплуатационных расходов.
Ключевые компоненты технологии совместного управления
1) Описание системы совместного управления. В этом разделе кратко описаны ключевые компоненты системы совместного управления.
а) Модель продольной динамики. Модель продольной динамики имеет решающее значение для совместного контроля КАВ. Он прогнозирует, как будут меняться скорость и ускорение CAV в зависимости от различных факторов, таких как динамика, поведение при вождении, дорожные условия и транспортный поток. Модель улучшает поведение при вождении, повышает эффективность вождения и используется для формирования очередей, слияния и смены полос движения.
Существуют различные типы моделей продольной динамики, различающиеся по сложности и точности. Выбор кинетической модели зависит от требуемой точности, вычислительных ресурсов и доступности данных. Например, линейные модели являются самыми простыми и предполагают линейную зависимость между ускорением и входными данными, такими как положение дроссельной заслонки, тормозное усилие и внешние возмущения. Нелинейные модели обеспечивают большую точность и возможность обрабатывать более сложные ситуации.
б) Топология информационного потока. Концепция топологии информационного потока в контексте совместного управления CAV относится к способу, которым несколько транспортных средств обмениваются информацией для достижения скоординированного и эффективного движения. Это жизненно важно для обеспечения безопасного и эффективного совместного движения транспортных средств, снижения вероятности аварий и улучшения общего транспортного потока.
Существует несколько способов классификации топологий информационных потоков, каждый из которых имеет свой уникальный подход к обмену информацией и достижению скоординированного движения. Эти методы включают в себя «лидер-последователь» (PF), «лидер-лидер-последователь» (PLF), двунаправленный (BD), двунаправленный «лидер-последователь» (BDL), два «лидер-последователь» (TPF) и два «лидер-последователь» (TPLF). Координация и гибкость различаются в зависимости от метода: некоторые позволяют улучшить координацию, а другие — большую гибкость движений. Выбор метода зависит от конкретного контекста и целей командного спорта, таких как минимизация задержек, снижение расхода топлива или предотвращение несчастных случаев. В целом, концепция и метод классификации топологии информационных потоков имеют решающее значение для успешной реализации совместного управления CAV, поскольку они позволяют нескольким транспортным средствам безопасно и эффективно передвигаться по дороге.
в) Качество связи. При совместном управлении CAV эффективная связь имеет решающее значение для безопасной и эффективной работы. Однако когда несколько транспортных средств обмениваются данными друг с другом, могут возникнуть проблемы с качеством связи, что приведет к задержкам или потере данных. Это может быть вызвано такими факторами, как перегрузка сети, помехи сигнала или сбой оборудования. Например, важной проблемой, которая может возникнуть, являются задержки связи. Это относится ко времени, которое требуется для передачи данных от одного транспортного средства к другому, и может быть вызвано различными факторами, такими как ограниченная полоса пропускания, ошибки передачи или перегрузка сети. Задержки связи могут привести к потере координации между транспортными средствами, что может привести к авариям или столкновениям. Чтобы облегчить эту проблему, можно использовать такие методы, как приоритезация сообщений, эффективные алгоритмы маршрутизации и методы управления перегрузкой.
Еще одна критическая проблема — потеря пакетов. Это происходит, когда пакеты теряются во время передачи, что может быть вызвано такими факторами, как перегрузка сети, помехи сигнала или сбой оборудования. Потеря пакетов может привести к тому, что другие транспортные средства получат неправильную или неполную информацию, что приведет к небезопасной или неэффективной работе системы. Следовательно, его можно смягчить с помощью таких методов, как повторная передача пакетов, коды исправления ошибок и избыточность сети.
2) Цель системы совместного управления: Совместное управление автономными автопарками направлено на то, чтобы все транспортные средства в одной группе двигались с одинаковой скоростью, сохраняя при этом необходимое пространство между соседними транспортными средствами, тем самым увеличивая пропускную способность и повышая безопасность движения. Снижение расхода топлива. Устойчивость взводной системы является основой для всех вышеперечисленных целей управления. Цели управления технологией совместного управления можно грубо разделить на индивидуальную стабильность и стабильность струны.
а) Индивидуальная стабильность: Индивидуальная стабильность относится к стабильности каждого CAV в системе. Индивидуальные цели стабильности достигаются за счет обеспечения того, чтобы каждый CAV поддерживал желаемую скорость и расстояние до соседних транспортных средств. Алгоритм управления должен быть разработан таким образом, чтобы не допускать превышения или недостижения требуемой скорости и расстояния с учетом шума и помех. Достижение индивидуальной стабильности имеет решающее значение, поскольку оно обеспечивает основу для обеспечения общей стабильности системы.
Для сохранения индивидуальной устойчивости каждый CAV должен быть оснащен системой управления, способной точно измерять его скорость и положение относительно других машин парка. Система управления также должна иметь возможность регулировать скорость и ускорение CAV для поддержания желаемого положения и скорости внутри взвода. Этого можно достичь за счет использования передовых алгоритмов обнаружения и управления, таких как адаптивный круиз-контроль (ACC) и совместный адаптивный круиз-контроль. Этого можно достичь за счет использования передовых алгоритмов обнаружения и управления, таких как адаптивный круиз-контроль (ACC) и совместный адаптивный круиз-контроль.
б) Стабильность струны. С другой стороны, стабильность струны означает стабильность всей строки или строки CAV в системе. Устойчивость колонны достигается за счет обеспечения того, чтобы CAV во взводе сохраняли постоянное и безопасное расстояние при движении с постоянной скоростью. Алгоритм управления должен обеспечивать быструю компенсацию любых возмущений или колебаний скорости или расстояния и возвращение автопарка в желаемое состояние.
Поддержание стабильности струн является более сложной задачей, чем индивидуальная стабильность, поскольку требует координации нескольких транспортных средств с различной динамикой. Чтобы поддерживать стабильность цепочки, система управления должна гарантировать, что каждый CAV во взводе следует заранее определенной политике интервалов, которая определяет расстояние между каждым транспортным средством во взводе и то, как это расстояние поддерживается во время работы. Связь V2V может использоваться для обмена информацией о положении и скорости каждого CAV и соответствующей корректировки стратегии расстояний. Система управления также должна быть способна обнаруживать любые нарушения или перерывы в работе взвода и соответствующим образом реагировать на поддержание требуемой стратегии расстановки сил.
Для поддержания стабильности струны можно использовать несколько методов, включая управление на основе согласованности, MPC, управление с обратной связью и управление с прямой связью. Управление на основе согласия включает разработку алгоритмов распределенного управления, которые позволяют каждому CAV регулировать свою скорость и положение на основе информации от соседних транспортных средств. MPC использует динамическую модель системы для прогнозирования ее будущего поведения и соответствующей оптимизации управляющих входов. Управление с обратной связью регулирует скорость и положение каждого автомобиля на основе обратной связи датчиков и связи с другими транспортными средствами в парке. Управление с упреждением прогнозирует управляющие входные данные, необходимые для поддержания стабильности цепочки, на основе текущего состояния каждого транспортного средства и желаемой траектории парка.
метод коллективного управления
1) Схема сотрудничества. Схема координации нескольких транспортных средств является ключевым компонентом совместного управления CAV, позволяя им работать вместе эффективно и безопасно. Схема относится к методам и приемам координации поведения нескольких CAV для достижения общей цели. Несколько транспортных средств имеют разные схемы координации и могут быть классифицированы в соответствии с используемым ими режимом управления. Три основных режима управления: централизованное управление, децентрализованное управление и гибридное управление.
а) Централизованный контроль. Модель централизованного управления предполагает наличие центрального органа, такого как диспетчерская вышка или система управления дорожным движением, контролирующего все транспортные средства. Центральные органы собирают информацию о дорожном движении и используют ее для оптимизации поведения транспортных средств. Хотя эта модель обеспечивает превосходную координацию и оптимизацию, она требует высокого уровня связи и вычислительной мощности.
б) Децентрализованное управление: Напротив, в режиме децентрализованного управления каждый CAV является автономным и принимает собственные решения на основе местной информации. Каждое транспортное средство общается со своими соседями и корректирует свое поведение, чтобы избежать столкновений и поддерживать желаемый строй. Эта модель более масштабируема и устойчива, чем централизованное управление, но может не обеспечивать оптимальную координацию.
в) Гибридное управление: Кроме того, гибридный режим управления представляет собой комбинацию режима централизованного управления и режима децентрализованного управления. В этой модели некоторые аспекты координации решаются централизованно, тогда как другие аспекты решаются на местном уровне. Например, центральный орган может предоставлять команды высокого уровня, такие как желаемые маршруты и скорости, в то время как каждое транспортное средство будет адаптировать свое поведение к местным условиям. Эта модель обеспечивает гибкий и адаптивный подход к координации, который обеспечивает как глобальную оптимизацию, так и местное реагирование.
Каждый вариант координации имеет свои преимущества и недостатки.,Выбор правильной программы зависит от ваших конкретных потребностей и имеющихся ресурсов. Централизованное управление больше подходит для высокоавтономных транспортных средств, работающих в четко определенной среде.,Примеры включают закрытые кампусы или выделенные полосы на автомагистралях. Децентрализованное управление больше подходит для низкого уровня автономии.,Например, автопарк,Группа CAV следует за головной машиной. Гибридное управление подходит для приложений, требующих как глобальной координации, так и местной адаптации.,Например, управление городским транспортом. Классифицируя схемы согласования по режимам управления,Лучший метод можно выбрать в зависимости от конкретного приложения и уровня автономности CAV.
Технология совместного управления оптимизирует поведение нескольких транспортных средств, координируя их движения. В отличие от традиционных методов управления отдельными транспортными средствами, технологии совместной работы полагаются на связь между транспортными средствами для обмена информацией об их статусе и целях. Они должны учитывать сложные взаимодействия и зависимости между несколькими транспортными средствами и иметь возможность адаптироваться к меняющимся условиям в режиме реального времени. Однако разработка этих методов является сложной задачей из-за большого количества переменных, которые необходимо учитывать, и необходимости в надежных алгоритмах, способных обрабатывать непредвиденные ситуации.
2) Метод: технология совместного управления использует передовые алгоритмы и методы расчета.,Позвольте CAV общаться и сотрудничать друг с другом в режиме реального времени. Метод коллективного управления можно классифицировать на основе математической модели, используемой для разработки алгоритмов управления.,Включает теорию игр, методы, основанные на оптимизации и обучении с подкреплением. в следующем разделе,Мы подробно представим эти три метода и их применение в совместном управлении CAV.
а) Подход теории игр. Подход теории игр моделирует взаимодействие между несколькими CAV как игру, где каждое транспортное средство является игроком, стремящимся оптимизировать свои собственные цели, принимая во внимание действия других игроков. Затем разрабатываются алгоритмы управления для определения равновесия Нэша, при котором ни один игрок не может увеличить результат, в одностороннем порядке изменив свое поведение. Подходы теории игр полезны для управления сложными динамическими взаимодействиями между несколькими транспортными средствами.
б) Подход, основанный на оптимизации. Подход, основанный на оптимизации, формулирует проблему совместного управления как задачу оптимизации, цель которой состоит в том, чтобы найти наилучшее действие для каждого транспортного средства, чтобы максимизировать общую производительность группы. Эти алгоритмы могут быть разработаны с использованием методов линейной или нелинейной оптимизации и подходят для обработки широкого спектра сценариев. Зачастую методы, основанные на оптимизации, могут быть не в состоянии справиться с неопределенностью и непредсказуемостью реальных сред.
в) Методы, основанные на обучении с подкреплением. Методы, основанные на обучении с подкреплением, требуют обучения алгоритма управления с использованием метода проб и ошибок, при котором алгоритм учится на собственном опыте работы в окружающей среде [282]. Эти алгоритмы могут быть разработаны с использованием методов глубокого обучения и адаптированы к изменяющейся среде.
Чтобы воспользоваться преимуществами обучения с подкреплением, различные исследователи научили своих движущих агентов принимать решения на основе собственных наблюдений. Однако методы, основанные на обучении с подкреплением, могут потребовать больших объемов обучающих данных, и их трудно интерпретировать и проверять.
приложение
Для разработки алгоритмов, которые могут работать в реальных жизненных ситуациях.,Большинство существующих исследований по технологиям совместного управления фокусируются на конкретных сценариях вождения или транспортных средствах.,Например, очереди, смена полосы движения, слияние и перекрестки. В этом разделе будет представлен обзор некоторых из наиболее многообещающих технологий совместного управления CAV, а также их потенциальных преимуществ и проблем. В этой статье эти программы-приложения разделены на три группы в зависимости от уровня сотрудничества.,Это одномерное, двухмерное и трехмерное сотрудничество. Каждый уровень сотрудничества представляет собой уникальные технические и эксплуатационные проблемы.,Но это также дает возможности для повышения безопасности, эффективности и комфорта перевозок.
1) Одномерное сотрудничество. Одномерное сотрудничество предполагает координацию продольного (т. е. движения вперед/назад) движения транспортных средств, например, в колонне.
а) Взвод: во взводе технология совместного управления позволяет CAV перемещаться на небольшом расстоянии между транспортными средствами, при этом ведущее транспортное средство определяет скорость и маршрут других транспортных средств во взводе. Этот подход может значительно повысить топливную экономичность и снизить выбросы за счет минимизации лобового сопротивления и сопротивления воздуха между транспортными средствами. Кроме того, очереди помогают уменьшить заторы и улучшить транспортный поток, особенно в городских районах с высокой плотностью движения.
2) Двумерное сотрудничество. Двумерное сотрудничество предполагает координацию бокового (т. е. влево/вправо) движения транспортного средства, например, смены полосы движения.
а) Смена полосы движения: при поддержке технологии совместного управления можно повысить безопасность и эффективность смены полосы движения, позволяя транспортным средствам общаться друг с другом и координировать свои движения, даже когда видимость ограничена или они движутся на высоких скоростях. Кроме того, эта технология может прогнозировать и предотвращать столкновения, автоматически обнаруживая и избегая потенциальных опасностей.
Чтобы оптимизировать решения о смене полосы движения и улучшить транспортный поток, исследователи предложили различные стратегии совместного вождения. Например, Лин и др. предложили совместную стратегию смены полосы движения с использованием переносимой игровой среды, которая улучшила индивидуальные и социальные выгоды, не влияя на условия дорожного движения. Аналогичным образом, Али и др. разработали основанную на теории игр модель принудительной смены полосы движения для традиционных и подключенных сред.
3) Трехмерное сотрудничество. Трехмерное сотрудничество предполагает координацию продольных и поперечных движений, а также временного измерения, особенно в ситуациях, когда несколько транспортных средств приближаются к перекресткам или точкам слияния с разных направлений. Чтобы избежать столкновений, транспортные средства должны координировать не только свои продольные и поперечные движения, но также время и последовательность въезда, что требует передовых возможностей связи, зондирования и принятия решений.
а) Объединение съездов: когда дело доходит до слияния на съездах шоссе, технология совместного управления может помочь уменьшить заторы и улучшить транспортный поток, позволяя транспортным средствам сливаться безопасно и эффективно. Обмениваясь информацией о своем положении и скорости, транспортные средства могут координировать свои движения, чтобы избежать столкновений и плавно сливаться с другими транспортными средствами на шоссе.
б) Сигнализированные перекрестки. На регулируемых перекрестках можно использовать технологию совместного управления, позволяющую транспортным средствам взаимодействовать друг с другом и с инфраструктурой, чтобы оптимизировать транспортный поток и снизить вероятность аварий. Позволяя транспортным средствам предвидеть сигналы светофора и реагировать на них, технология совместного управления может помочь сократить время ожидания и пробки, повысить безопасность поворотов и обеспечить более эффективное использование пропускной способности перекрестков.
в) Нерегулируемые перекрестки. На нерегулируемых или неконтролируемых перекрестках технология совместного управления может помочь повысить безопасность и эффективность, позволяя транспортным средствам взаимодействовать друг с другом и координировать свои движения. Это помогает снизить вероятность аварий из-за ошибок связи или невозможности уступить дорогу, а также позволяет сделать транспортный поток на перекрестках более плавным и эффективным.
в общем,В этом разделе обсуждается технология совместного управления CAV.,Это важно для достижения его улучшения на транспорте.система Потенциал имеет решающее значение。он охватывает передовые технологии、ключевые компоненты、метод коллективного управления и потенциала приложения. Содействующие технологии предоставляют CAV коммуникационную инфраструктуру для обмена информацией и совместной работы. Ключевые компоненты, такие как модель продольной динамики, топология информационного потока, качество и стабильность связи, необходимы для совместного управления. метод коллективного управление включает в себя централизованное、分散式或смешивание控制模式,И используйте теорию игр, методы, основанные на оптимизации или на основе обучения с подкреплением. Потенциальные возможности совместного контроля включают очереди, смену полосы движения, перекрестки и т. д.,может быть в одном、Повышение эффективности трафика в двух- или трехмерных сценариях совместной работы.、Сокращение выбросов и повышение безопасности.
Выводы и будущие направления
Это исследование оказывает существенное влияние на Всесторонне рассмотрено управление транспортными средствами для автомобилей, подключенных автомобилей и автоматизированных автомобилей. Статья начинается с оценки состояния транспортного средства с точки зрения различных конфигураций датчиков и характеристик модели, особенно оценки. угла бокового скольжения автомобиль. Далее обсуждается, что существует три типа Автономного. Алгоритм управления вождением для управления отслеживанием траектории AV: управление с обратной связью без прогнозирования, модель прогнозирующего управления с прогнозированием и управление на основе обучения. Различные алгоритмы отслеживания траектории также анализируются с четырех основных точек зрения: сложность модели, вычислительные затраты, оптимальная производительность и сценарии приложений. Также изучаются соответствующие технологии, ключевые компоненты, методы совместного управления и потенциальные приложения, которые могут значительно повысить эффективность, безопасность и устойчивость будущей транспортной системы. Кроме того, в данной статье определено, что будущее за Автономным Исследования по управлению транспортными средствами посредством вождения и совместной автоматизации вождения могут быть расширены по следующим направлениям.
1) Мультимодальная надежная оценка состояния: в дополнение к глобальным навигационным спутниковым системам также можно использовать лидар и камеры для оценки состояния транспортного средства с целью дальнейшего повышения точности оценки. Однако эти датчики чувствительны к факторам окружающей среды, таким как здания, освещение и погода. Более того, их задержки и частоты дискретизации сильно различаются. Поэтому необходимо изучить уровень достоверности сигналов датчиков в режиме реального времени и разработать надежные алгоритмы слияния.
2) Надежное управление отслеживанием траектории с неопределенностью состояния: благодаря наличию мультимодальной информации можно оценить трехмерную информацию о положении транспортного средства в реальном времени. Таким образом, модель управления транспортным средством может быть расширена из двухмерной плоскости в трехмерное пространство. Поскольку результаты оценки состояния могут иметь определенную степень неопределенности, при разработке алгоритма управления траекторией крайне важно учитывать влияние неопределенности оценки состояния на производительность алгоритма.
3) Решить проблемы управления гетерогенной динамикой в гибридных автономных автопарках: при столкновении с гибридным автономным трафиком взаимодействие и координация между человеческими приводами и беспилотными автомобилями создают серьезные проблемы для технологии совместного управления. Одной из самых больших проблем в этой области является неоднородная динамика, вызванная поведением человека на флоте. Чтобы преодолеть эту проблему, исследователям и инженерам необходимо разработать инновационные технологии управления, которые адаптируются к изменчивости действий водителя, сохраняя при этом безопасность и эффективность на дороге. Эти технологии могут включать в себя алгоритмы машинного обучения, которые прогнозируют поведение водителя-человека, а также гибридные архитектуры управления, сочетающие в себе технологии централизованного и децентрализованного управления. Такой подход позволит беспилотным автомобилям адаптироваться к поведению транспортных средств, управляемых человеком, сохраняя при этом уровень координации внутри автопарка.
4) Устойчивая технология управления CAV в случае кибератак и сбоев связи: в реалистичных и непредсказуемых условиях вождения могут возникнуть сбои связи и датчиков, а враждебные объекты могут нарушить работу системы. Поэтому необходимо интегрировать устойчивые методы управления в системы совместного управления, чтобы системы могли продолжать работать и адаптироваться к меняющимся условиям даже при наличии сбоев, ошибок или атак. Использование технологий из области киберфизических систем станет эффективным способом разработки гибкой технологии совместного управления для CAV. Кроме того, крайне важно учитывать требования безопасности и конфиденциальности. Разработка протоколов связи, зондирования и управления с учетом безопасности и конфиденциальности, таких как использование механизмов шифрования, аутентификации и контроля доступа, будет иметь решающее значение для обеспечения безопасности и производительности будущих CAV.
5) Разработка единой платформы моделирования и интеллектуальной среды тестирования для оценки безопасности технологии совместного управления. Разработка единой платформы моделирования и интеллектуальной среды тестирования является ключевым шагом для обеспечения безопасности технологии совместного управления CAV. Платформа позволит исследователям и инженерам оценить эффективность и безопасность стратегий управления CAV в виртуальной среде, прежде чем они будут реализованы в реальном мире. Чтобы достичь этого, необходимо иметь полное представление о стратегиях контроля CAV и лежащих в их основе технологиях. Платформа моделирования должна точно моделировать поведение CAV и их взаимодействие с другими транспортными средствами и инфраструктурой, а также использовать методы машинного обучения, чтобы обеспечить ускоренное тестирование и обучение с другими критически важными для безопасности автономными системами.
ссылка
[1] A Systematic Survey of Control Techniques and Applications in Connected and Automated Vehicles



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
