Видеоанализ RV1126 ----- Обзор каждого модуля драйвера
1. Общая теория:
1. Ссылка на оборудование:
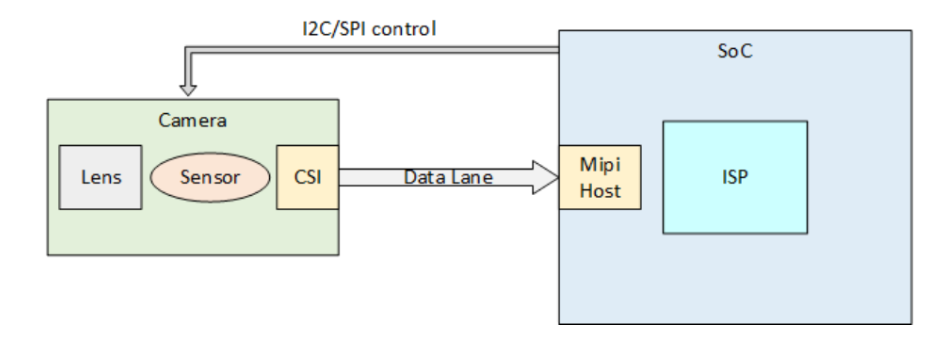
Как правило, камера и SOC имеют два интерфейса для подключения, которые разделены на интерфейс MIPI и интерфейс I2C. Интерфейс MIPI используется для передачи данных изображения, а путь передачи данных — от датчика к SOC. Другой интерфейс — это интерфейс I2C, который в основном используется SOC для настройки регистра конфигурации инициализации датчика и параметров камеры. Например, при захвате данных изображения вам необходимо настроить регистр датчика через i2c.
2. Поток данных изображения:
После того, как свет проходит через датчик, чип датчика генерирует исходные данные изображения (необработанные) посредством преобразования АЦП, а затем исходные данные изображения (необработанные), сгенерированные датчиком, поступают в SOC через шину MIPI. После входа в SOC они проходят. через чип обработки изображений (например, ISP) для обработки изображений. Итак, видно, что драйвер камеры V4L2 должен состоять из этих трех частей:
- Часть первая связана с датчиком.,Например, управляйте регистром датчика для настройки.,Эта деталь предоставлена производителем датчика.
- Вторая часть связана с MIPI.,MIPI необходим для передачи изображений,Таким образом, у водителя должна быть эта часть драйвера,Эта часть обычно предоставляется производителями SOC.
- Третья часть — часть ISP.,Некоторые SOC имеют модуль ISPобработка изображений.,После того, как изображение, переданное через MIPI, попадает в SOC, изображение необходимо дополнительно обработать в модуле ISP входящего SOC.,Значит, должен быть какой-то драйвер, описывающий модуль ISP.
(Свет) -------> [sensor] ----->(rawизображениеданные) ----->[mipiавтобус] ----->[обработка изображенийчип(нравитьсяISP)] -----> (NV16/NV12 и данные изображения других форматов)
Выходной формат датчика необработанного формата — это исходная запись уровня, когда датчик преобразует оптический сигнал в электрический сигнал. Необработанные данные не обрабатываются:
2. Найдите эти три части из DTS:
Мы уже знаем, что у камеры есть три части драйверов, которые описывают сенсор, MIPI и чип обработки изображений, поэтому эти три части также описаны в dts.
Часть 1: dts, связанные с датчиком
&i2c1 {
tp2855_1: tp2855_1@44 {
compatible = "techpoint,tp2855";
reg = <0x44>; //i2c-адрес
...
port {
ucam_out0: endpoint {
remote-endpoint = <&csi_dphy0_input>; //Сенсорсоединять к mipi
data-lanes = <1 2 3 4>;
};
};
};
tp2855_2: tp2855_2@45 {
compatible = "techpoint,tp2855";
reg = <0x45>; //i2c-адрес
...
port {
ucam_out1: endpoint {
remote-endpoint = <&csi_dphy1_input>; //Сенсорсоединять к mipi csi_dphy1_input
data-lanes = <1 2 3 4>;
};
};
};
};
Часть 2. Связанная с физической шиной MIPI:
Для платформ RV1126 и RV1106 поддерживаются два оборудования DPHY. Существует два независимых и полных стандартных физических файла mipi csi2, соответствующих csi_dphy0 и csi_dphy1 в dts (см. rv1126.dtsi). Характеристики следующие:
data полоса максимум 4 lanes;
Максимальная скорость 2,5 Гбит/с/линия;
sensor----mipi dphy:
//соединять 0x44 первые четыре канала Камера
&csi_dphy0 {
status = "okay";
//mipi имеет два конца один сегмент соединятьSensor,Другойодинконецсоединять mipi_csi2_input
ports {
#address-cells = <1>;
#size-cells = <0>;
//соединятьприезжатьSensor
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
csi_dphy0_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&ucam_out0>; // соединятьприезжатьSensor : ucam_out0
data-lanes = <1 2 3 4>;
};
};
//соединятьприезжать mipi_csi2_input
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csi_dphy0_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi_csi2_input>; // соединятьприезжать mipi_csi2_input
data-lanes = <1 2 3 4>;
};
};
};
};
//соединять 0x45 тыловые четыре канала Камера
&csi_dphy1 {
status = "okay";
//соединятьприезжатьSensor
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
csi_dphy1_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&ucam_out1>;// соединятьприезжатьSensor : ucam_out1
data-lanes = <1 2 3 4>;
};
};
//соединятьприезжатьISP
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csi_dphy1_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&isp_in>; // соединятьприезжатьISP : isp_in
data-lanes = <1 2 3 4>;
};
};
};
};
Часть 3: анализ протокола mipi (хост MIPI)
Каждому mipi phy требуется модуль csi2 для анализа датчика протокола mipi ---- mipi dphy ---- mipi_csi2
&mipi_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&csi_dphy0_output>;
data-lanes = <1 2 3 4>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_in>;
data-lanes = <1 2 3 4>;
};
};
};
};
Часть 4: Связано с микросхемой обработки изображений (викап)
sensor----mipi dphy ---- mipi_csi2-----vicap
rkcif_mipi_lvds: rkcif_mipi_lvds {
compatible = "rockchip,rkcif-mipi-lvds";
rockchip,hw = <&rkcif>;
// iommus = <&rkcif_mmu>;
memory-region = <&isp_reserved>;
status = "disabled";
};
&rkcif_mipi_lvds {
status = "okay";
rockchip,cif-monitor = <3 2 25 1000 5>;
port {
/* MIPI CSI-2 endpoint */
cif_mipi_in: endpoint {
remote-endpoint = <&mipi_csi2_output>;
data-lanes = <1 2 3 4>;
};
};
};
Чип обработки изображений (ISP), связанный:
&rkisp_vir0 {
status = "okay";
ports {
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
isp_in: endpoint@0 {
reg = <0>;
remote-endpoint = <&csi_dphy1_output>;//соединятьприезжать mipi : csi_dphy1_output
};
};
};
};
0x44 Обработка изображения взаимосвязи соединений первых четырех каналов через vicap:
ucam_out0 - csi_dphy0_input - csi_dphy0_output - mipi_csi2_input <-> mipi_csi2_output
tp2855_1@44 csi_dphy0 mipi_csi2 rkcif_mipi_lvds
ucam_out0 ---> csi_dphy0_input -- csi_dphy0_output --> mipi_csi2_input -- mipi_csi2_output <---> cif_mipi_in
Разделение драйверов на первые четыре канала:
1 о Анализ сенсорного модуля: Sensor.c
kernel\drivers\media\i2c\techpoint\techpoint_v4l2.c
2 о mipi физический уровень (csi dphy) модуль (csi_dphy0 / csi_dphy1) анализ : mipi_csi_dphy.c
kernel\drivers\phy\rockchip\phy-rockchip-mipi-rx.c
3 о модуль парсинга mipi( mipi csi)(MIPI Анализ модуля хоста: mipi_csi.c
kernel\drivers\media\platform\rockchip\cif\mipi-csi2.c
4 о обработка изображенийvicap Анализ модуля: rkcif_mipi.c
kernel\drivers\media\platform\rockchip\cif\dev.c
0x45 Связь последних четырех каналов и маршрута обработки изображения isp:
ucam_out1 - csi_dphy1_input - csi_dphy1_output <-> isp_in
tp2855_2@45 csi_dphy1 rkisp_vir0
ucam_out1 --> csi_dphy1_input -- csi_dphy1_output <---> isp_in
Из приведенного выше анализа мы можем узнать, что в структуре камеры есть три части, которые необходимо реализовать на разных платах или разных платформах.
- Нет.одинчастьSensorСвязанные означает разные доски Камера Выбора точно нетодин Такой,Эта часть драйвера предназначена для инициализации датчика.,Регистрация конфигурации и т. д.,Например, при запуске захвата изображения,Нужен реестр конфигурации,Уровень приложения будет использовать один ioctloодин пошаговый вызов драйвера.,Итак, эта часть связана с датчиком,Датчику необходимо предоставить соответствующий драйвер.
- Раздел два, связанный с MIPI,Например, наши часто используемые SOC и Sensorсоединять используют интерфейс MIPI.,Поэтому необходимо реализовать драйвер для частей, связанных с MIPI.,Эта часть обычно предоставляется производителями SOC.
- Часть третья обработка изображенийчип(нравитьсяISP)часть,Если наша платформа SOC имеет модуль ISP, то для части модуля ISP будет код драйвера.,Эту часть также предоставляют производители SOC.
Из конфигурации dts мы видим, что путь привязки драйвера — от датчика к MIPI, а затем от MIPI к интернет-провайдеру. Таким образом, данные, полученные датчиком, передаются интернет-провайдеру через MIPI, а затем обрабатываются интернет-провайдером. и затем передается на прикладной уровень обработки, вероятно, этим процессом является вся структура драйвера камеры.
Ссылка на статью: http://t.csdnimg.cn/3xcLG.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
