Углубленный анализ архитектуры программного обеспечения автомобильных микроконтроллеров.
1. Базовые знания
Электромобили (EV) становятся предпочтительным видом транспорта, обеспечивая устойчивую и экологически чистую альтернативу традиционным автомобилям с двигателями внутреннего сгорания. В сложной экосистеме электромобилей многочисленные электронные блоки управления (ЭБУ) играют жизненно важную роль в обеспечении их эффективной работы. Блок управления двигателем (MCU) — это один из таких блоков управления двигателем, который отвечает за работу двигателя. В этой подробной статье мы исследуем мир блоков управления двигателями, рассмотрим их функции, компоненты и последние тенденции, влияющие на автомобильную сферу микроконтроллеров.
Узнайте о двигателях, используемых в электромобилях.
Прежде чем углубляться в тонкости блоков управления двигателем электромобиля, необходимо разобраться в различных типах двигателей, обычно используемых в электромобилях. Двумя наиболее распространенными типами являются бесщеточные двигатели постоянного тока (BLDC) и синхронные двигатели с постоянными магнитами (PMS).
Бесщеточные двигатели постоянного тока, также известные как двигатели с электронной коммутацией, не требуют щеток и коммутаторов, что повышает эффективность и сокращает необходимость технического обслуживания. По сути, обмотки катушек ротора и статора представляют собой постоянные магниты. Изменяя ток и его направление, магнитное поле, создаваемое статором, приводит в движение ротор с силой тяги/толкания. Изменяя ток через катушку, можно изменить как скорость, так и крутящий момент. С другой стороны, двигатели с постоянными магнитами также имеют постоянные магниты в роторе, а катушки статора намотаны по синусоидальной схеме. Хотя механизм управления более сложен, его удельная мощность и общие характеристики выше.
Двигатели BLDC и двигатели PMS доминируют на рынке, при этом двигатели BLDC предпочтительнее в трехколесных транспортных средствах, а двигатели PMS – в двухколесных/четырехколесных транспортных средствах. Кроме того, на загадочном рынке Индии все еще присутствует небольшое количество электромобилей, использующих асинхронные двигатели.
Особенности и компоненты блока управления двигателем (MCU)
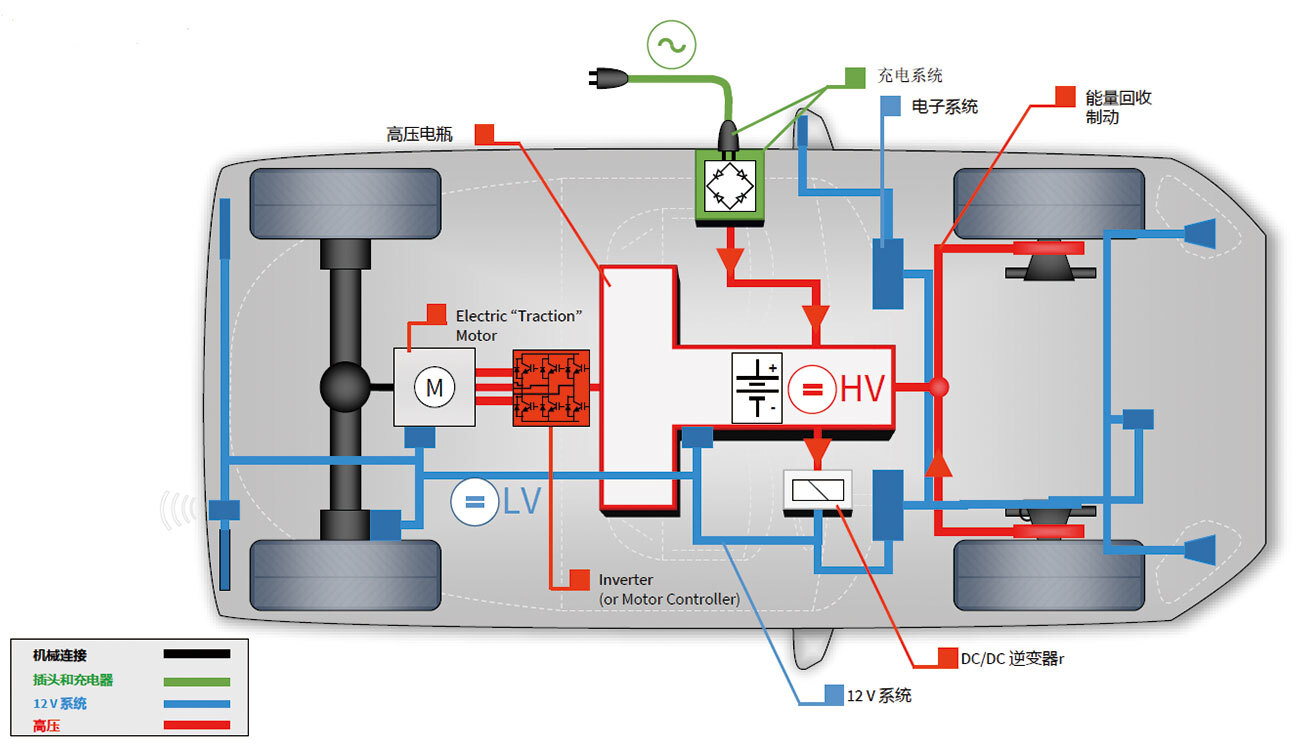
Блок управления двигателем является центральным узлом управления двигателями электромобилей и выполняет ряд важных функций, обеспечивающих плавное и эффективное вождение. Его основная задача — преобразовывать постоянный ток (DC), вырабатываемый аккумулятором, в трехфазный переменный ток (AC), который приводит в движение двигатель.
Кроме того, MCU контролирует ключевые параметры, такие как температура, ток и напряжение, чтобы оптимизировать работу двигателя и предотвратить потенциальный ущерб. Он также контролирует скорость, крутящий момент и направление вращения двигателя на основе данных, поступающих от водителя или системы управления транспортным средством.
Система тестирования электрических характеристик
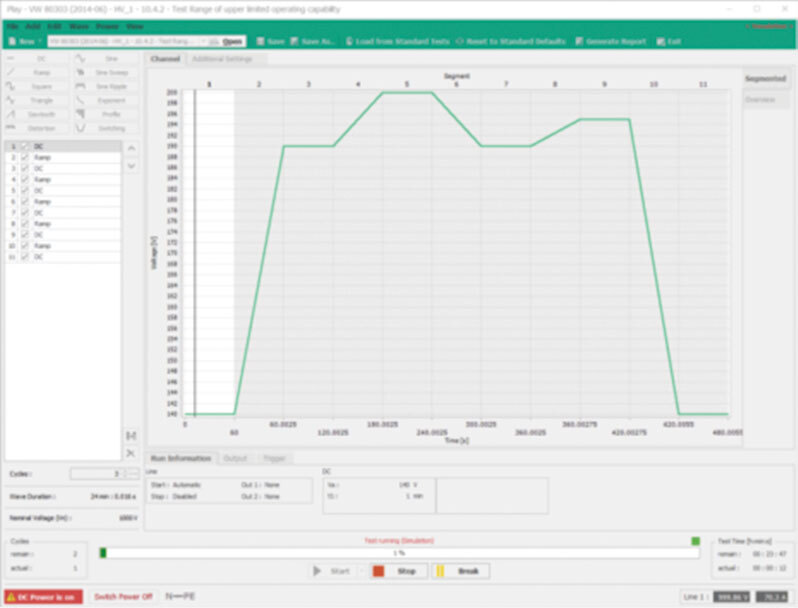
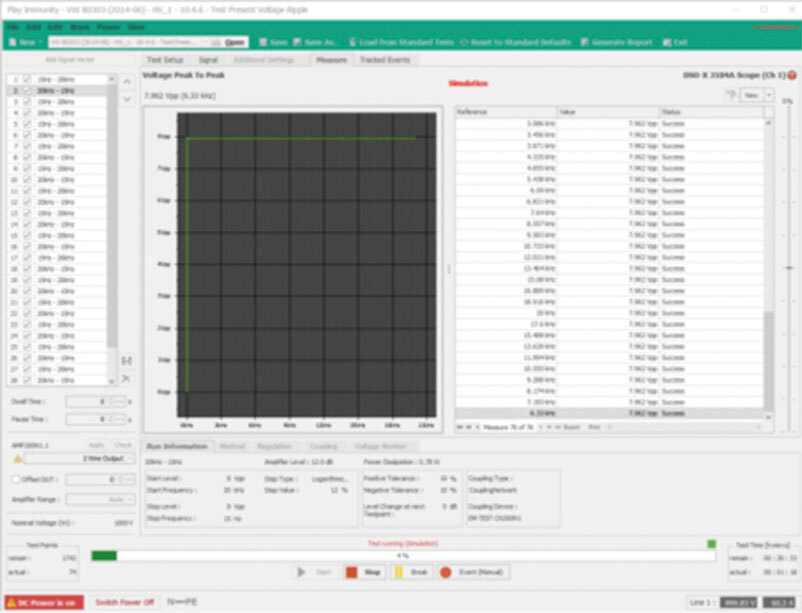
Из-за сложных условий эксплуатации транспортных средств существует множество факторов, которые приводят к нестабильности энергосистемы в автомобиле, например, запуск двигателя, колебания электросети, сброс нагрузки, дрожание цепей и т. д., что приводит к различным степеням неисправностей. выход из строя или повреждение электрооборудования автомобиля. Поэтому моделирование различных мгновенных неисправностей и колебаний электропитания, а также проведение испытаний на колебания электропитания электрооборудования и электрооборудования транспортных средств стали важной частью испытаний электрических характеристик и испытаний на электромагнитную совместимость (ЭМС) компонентов транспортных средств.
Архитектура MCU — аппаратная перспектива
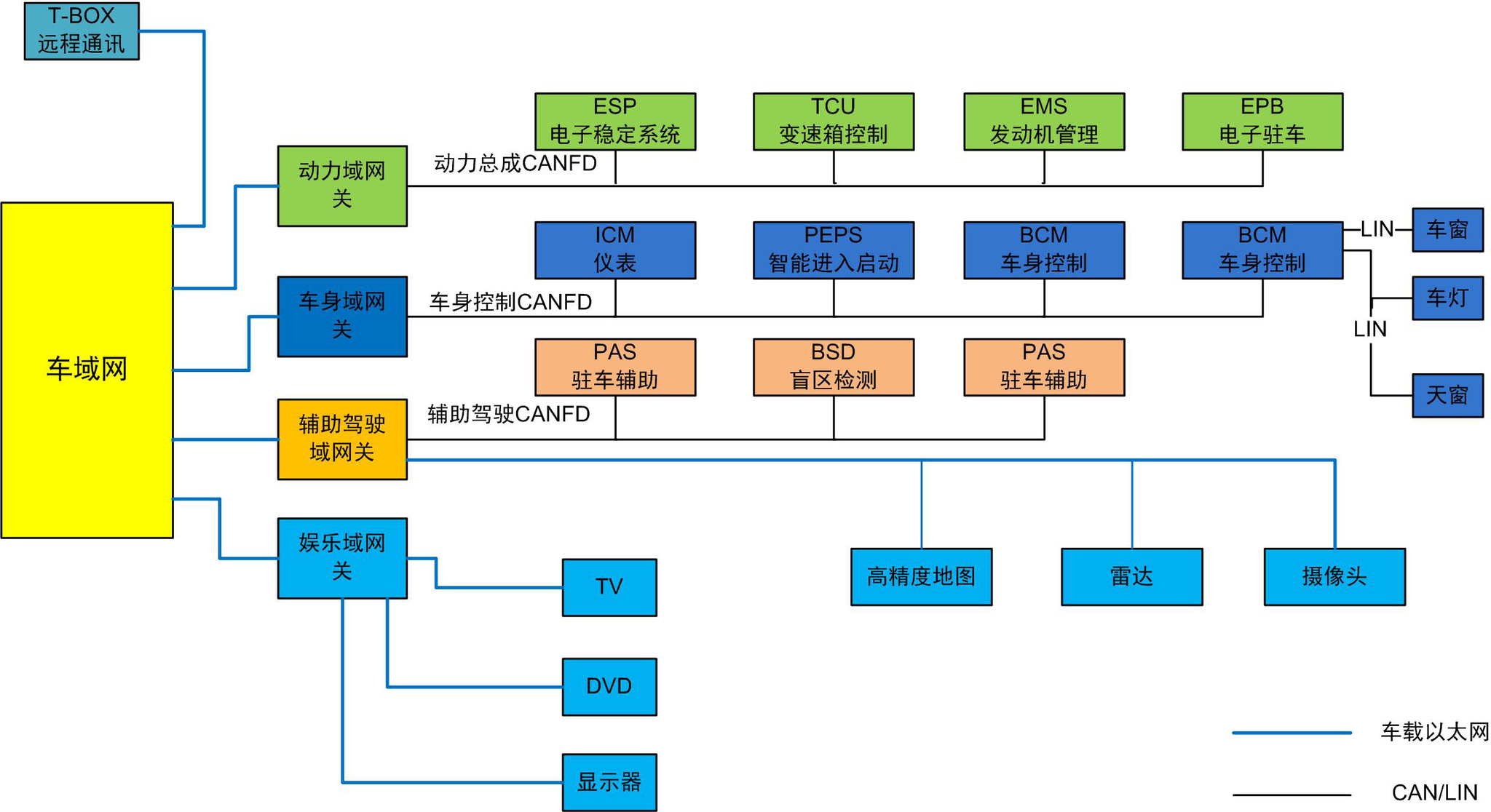
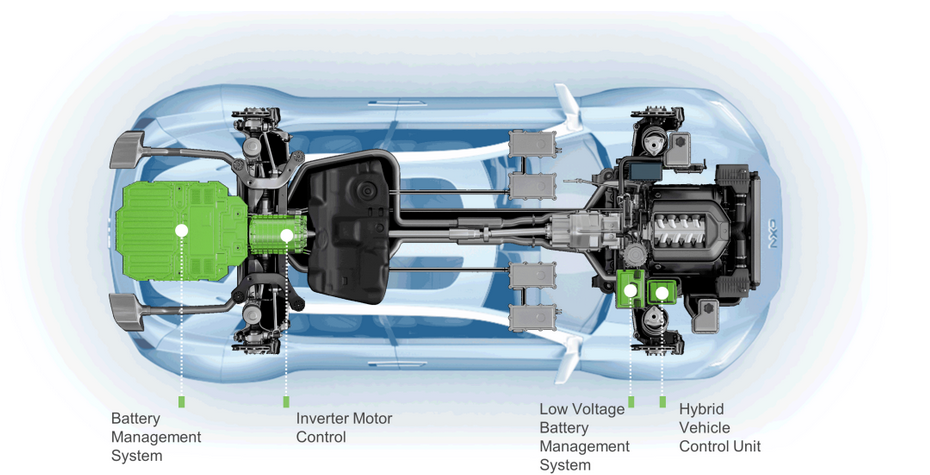
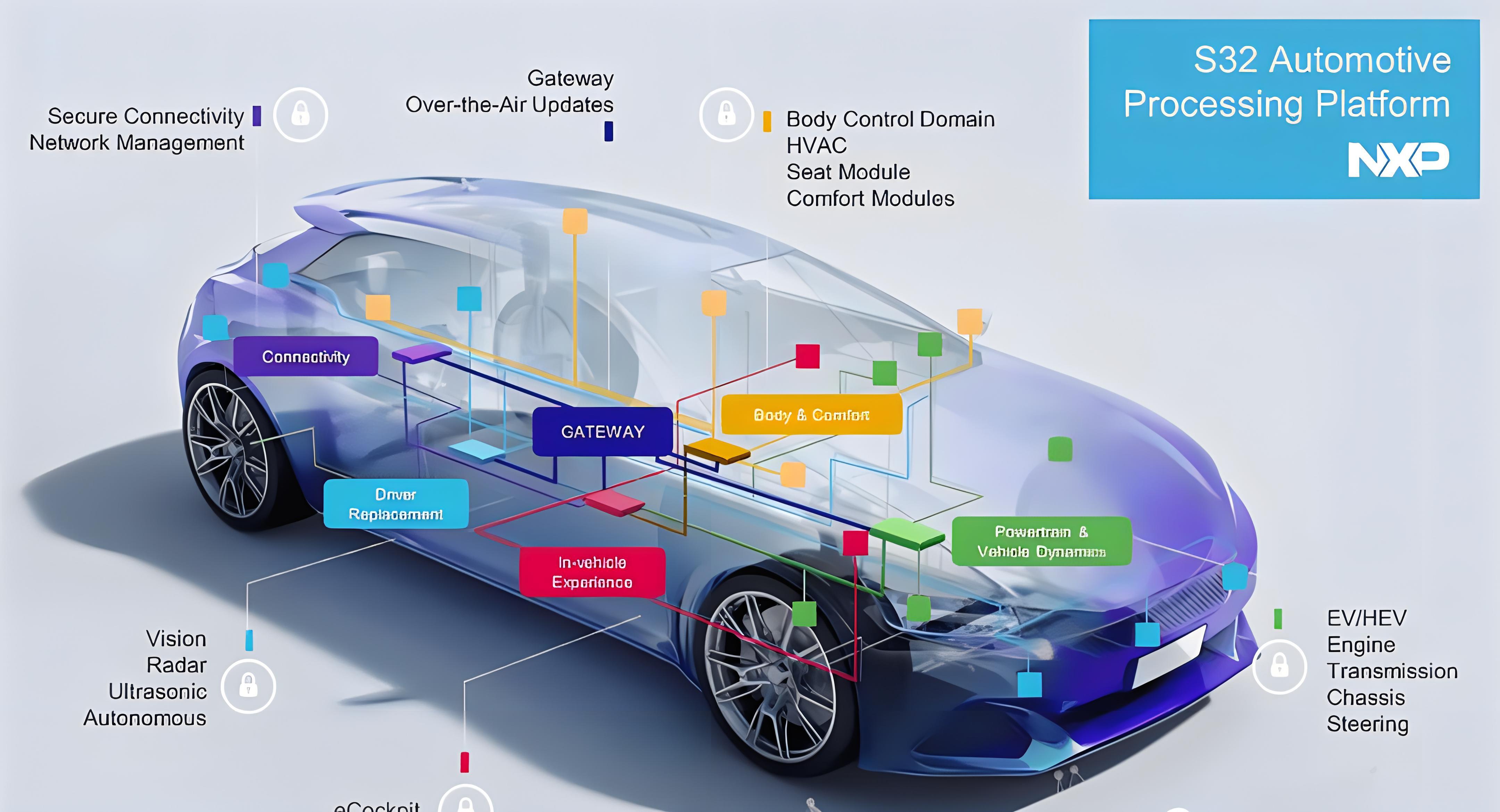
В этом разделе подробно описана архитектура MCU. Типичная блок-схема MCU выглядит следующим образом: Расположенный в центре микроконтроллер отвечает за выполнение сложных алгоритмов управления и управление общей работой двигателя. Он также предоставляет внешний цифровой интерфейс (в основном CAN), который позволяет ему взаимодействовать с другими ЭБУ в системе и получать управляющую информацию от VCU. Драйверы затворов используются для управления силовыми ключами и управляются выделенными периферийными устройствами контроллера драйвера или каналами ШИМ. Силовая электроника преобразует постоянный и переменный ток. Обычно для такого преобразования используется конфигурация из шести МОП-транзисторов, причем их количество увеличивается в соответствии с текущими требованиями двигателя. Различные сенсорные схемы обеспечивают обратную связь по параметрам двигателя, таким как положение, фазный ток, температура и т. д., для точного управления.
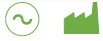
2. Эталонные стандарты испытаний
система высокого давления
- ISO/TS7637-4-2020 Электрические помехи, вызванные проводимостью и связью в дорожных транспортных средствах. Часть 4. Электрические переходные процессы, проводимые вдоль экранированных высоковольтных линий электропередачи.
- IS021498-1: Дорожные электромобили 2021. Электрические характеристики компонентов класса напряжения Bсистемаиитест. Часть 1. Земляные полотна и характеристики напряжения
- Другие компании внедряют стандарты испытаний, такие как VW80300/80303, MBNLV123, GS95023 и т. д.
система низкого давления
- GB/T28046.2-2019 Условия окружающей среды и испытания электрического и электронного оборудования дорожных транспортных средств. Часть 2: Электрические нагрузки (S016750-2-2012)
- IS07637-2-2011 Электрические помехи в дорожных транспортных средствах из-за проводимости и связи. Часть 2. Кондуктивные электрические переходные процессы вдоль линий электропередачи.
- Другие компании внедряют стандарты испытаний, такие как VW80000, MBNLV124/148, GS95002-3, 28400NDS9[5, GMW372-2018, SMTC3800001-2014 и т. д.
Система зарядки
- GB34660-2017 Требования к электромагнитной совместимости и методы испытаний дорожных транспортных средств (ECEReg10REV5)
- IEC61851 Электромобиль зарядки
3. Характеристики системы
- Адаптация к различным сценариям: лабораторное тестирование, автономное тестирование, сертификация третьей стороной.
- Полностью автоматический бенчмаркинг и создание отчетов.
- Емкость, которую можно гибко настраивать, расширять и модернизировать (Напряжение ~1500В, ток ~1000А, частота пульсаций ~300к Гц) Да
- Постройте полную систему поэтапно и в проектах, расширьте тестовый проект
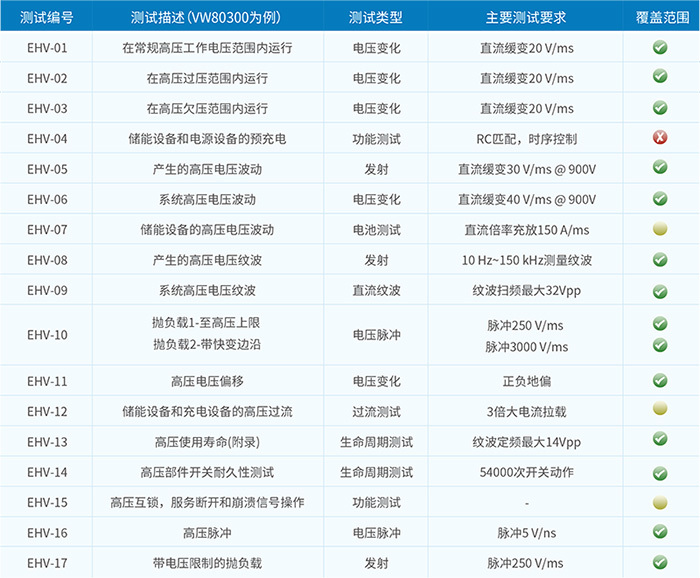
4. Структура системы
Система испытания электрических характеристик высоковольтных деталей
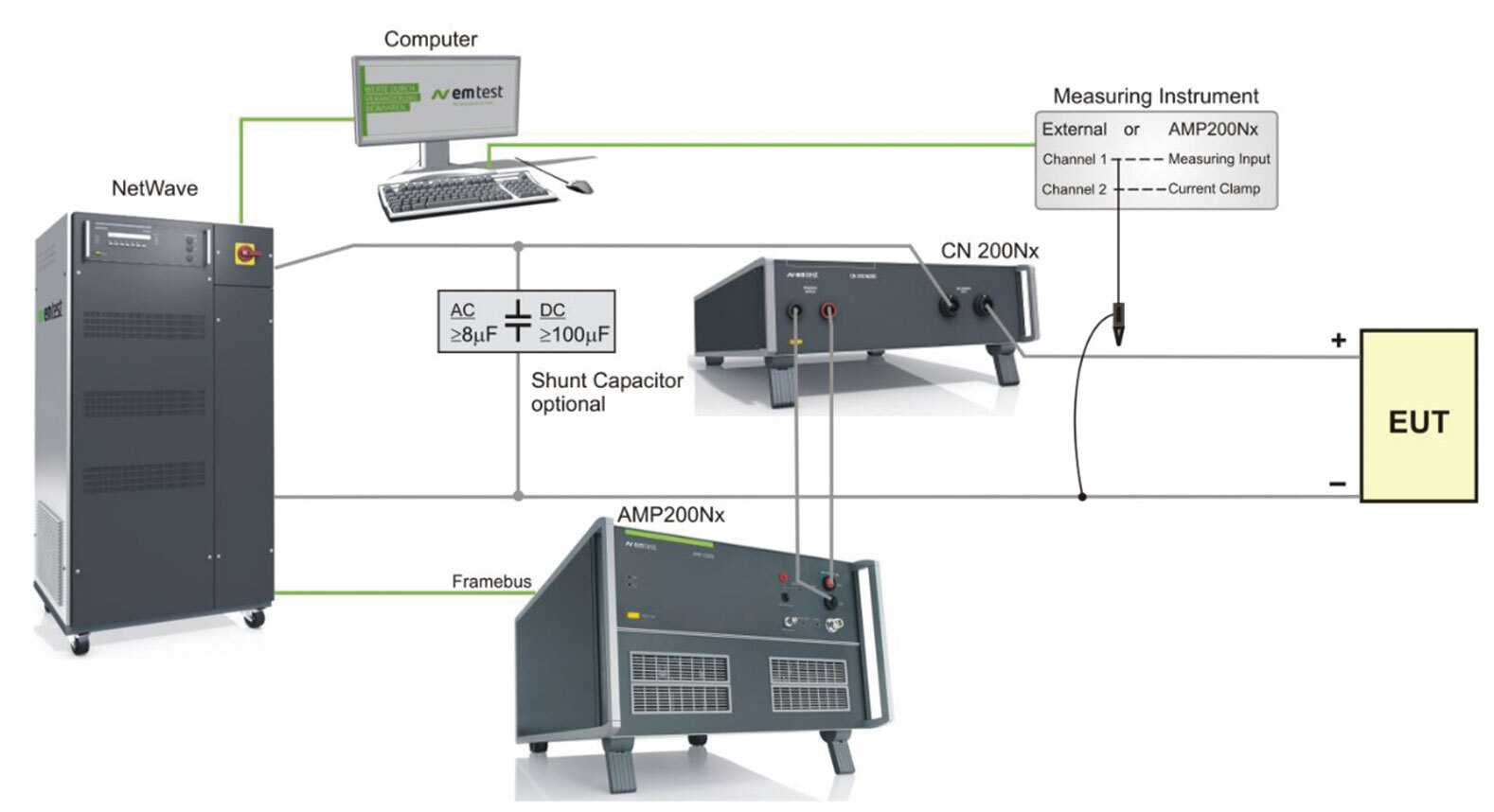
Система испытания электрических характеристик низковольтных деталей
Тестовый пример
Программная архитектура автомобильного MCU
Как и другие встраиваемые системы, электрическая машина Блок управления двигателемпрограммное обеспечение Архитектура Также используется многоуровневый подход.。Прошивка предоставленаУправление двигателемикоммуникацияСостоит из двух частей。Управление Секция двигателя контролирует входные сигналы от различных датчиков и управляет фазными токами, используя сложные математические функции. Раздел связи обеспечивает плавное управление внешней системой, позволяя пользователю взаимодействовать и настраивать параметры двигателя, такие как пределы скорости и крутящего момента, в соответствии с различными условиями вождения и предпочтениями. MCU Архитектура должна соответствовать ISO26262 и другие стандарты безопасности. Кроме того, это должна быть высоконадежная конструкция, которая эффективно управляет рассеиванием мощности без ущерба для производительности и удобства работы пользователя. Приводная техника в блоках управления двигателями Хотя существует множество методов управления двигателями, таких как трапециевидное управление и синусоидальное управление, широко используется технология привода, основанная на управлении по полю (FOC).
Первоначально разработанный для двигателей переменного тока, FOC оптимизирует выходной крутящий момент двигателя за счет максимизации квадратурной составляющей. При взаимодействии магнитных потоков статора и ротора возникает сила в виде вектора, имеющего две компоненты – d и q. Компонент d перпендикулярен оси ротора и связан с компонентом потока, а компонент q представляет крутящий момент и перпендикулярен d. Хотя эта технология требует более быстрой и более высокой вычислительной мощности, FOC повышает эффективность двигателя, снижает потери энергии и улучшает общую производительность системы. Динамически регулируя ток и напряжение двигателя, приводы на базе FOC обеспечивают более плавное ускорение, более высокий выходной крутящий момент и лучшую отзывчивость.
Силовая электроника в автомобильных микроконтроллерах
Силовая электроника играет жизненно важную роль в автомобильных микроконтроллерах, обеспечивая преобразование и управление электричеством. В двигателях низкого напряжения (обычно менее 100 В) используются МОП-транзисторы (металлооксидные полупроводниковые полевые транзисторы). Напротив, в высоковольтных двигателях используются силовые ключи из нитрида галлия (GaN) и драйверы из карбида кремния (SiC)/биполярных транзисторов с изолированным затвором (IGBT). По сравнению с традиционными переключателями на основе кремния, силовые переключатели из нитрида галлия имеют преимущества более высокой скорости переключения, меньших потерь мощности и лучших тепловых характеристик. В результате управление двигателем становится более эффективным, потребляет меньше энергии и имеет большую удельную мощность. С другой стороны, драйверы SiC и IGBT обеспечивают более высокие рабочие температуры и напряжения, что приводит к повышению производительности и надежности в требовательных приложениях электромобилей. Эти передовые технологии силовой электроники помогают оптимизировать автомобильные микроконтроллеры и повысить общую эффективность и производительность электромобилей.
Повышение эффективности за счет рекуперативного торможения
Регенеративное торможение является важной особенностью электромобилей, которая позволяет блокам управления двигателем использовать и восстанавливать энергию во время замедления и торможения. Вместо того, чтобы преобразовывать кинетическую энергию в тепло, рекуперативное торможение преобразует ее в электрическую энергию, которая затем сохраняется в аккумуляторе автомобиля. Этот процесс требует сложной электроники и программных механизмов для эффективного использования генерируемой обратной электродвижущей силы (ЭДС). Используя рекуперативное торможение, блоки управления двигателем могут значительно повысить эффективность и запас хода электромобилей. Эта технология не только снижает потери энергии, но и обеспечивает более плавное и контролируемое торможение, улучшая общее впечатление от вождения.
Многомоторные электромобили
Стремясь к повышению производительности и эффективности, компания «Многомоторные» Уровень внедрения электромобилей постоянно растет. Многомоторные электромобили имеют лучший контроль тяги, большую устойчивость и более высокий общий комфорт. В этих транспортных средствах используются несколько электродвигателей для привода отдельных колес или колес, что обеспечивает улучшенное векторирование крутящего момента и точный контроль каждого колеса. Однако,Многомоторные Реализация электромобилей требует сложной и дорогостоящей конструкции из-за связанного с ней Блока. управления Двигатель должен уметь управлять распределением мощности, распределением крутящего момента и координацией между двигателями. Эти блоки управления используют передовые алгоритмы и протоколы связи для обеспечения плавной интеграции и синхронной работы.
Новые тенденции в блоках управления двигателями
Индустрия электромобилей продолжает развиваться, и средства управления двигателем продолжают добиваться значительных успехов. Одной из новых тенденций является разработка устройств управления двигателями, способных управлять несколькими двигателями одновременно. Кроме того, уровни напряжения продолжают стандартизироваться: все больше и больше OEM-производителей переходят на 48 В. Как только стандартизация будет достигнута, отрасль может перейти на более высокие напряжения для повышения эффективности. Ожидается, что переход к секционированной архитектуре также приведет к значительным изменениям в архитектуре MCU и ее позиционировании. Что касается двигателей, производители двухколесных транспортных средств экспериментируют с компоновками двигателей, исследуя режимы как ступичного, так и среднего привода. Также произошли значительные улучшения в силовой электронике с более тесной интеграцией и повышением эффективности. В ближайшее время ожидаются интересные события в этой области.
Заключение: Разработка блока управления двигателем для электромобилей.
По мере роста популярности электромобилей роль блоков управления двигателем в революционном изменении характеристик электромобилей становится все более важной. Автомобильные микроконтроллеры являются движущей силой двигателей электромобилей, обеспечивая оптимальную производительность и эффективность. Благодаря постоянному совершенствованию архитектуры и технологий MCU будущие электромобили станут более эффективными, мощными и устойчивыми. Благодаря своей надежной команде инженеров и богатой партнерской экосистеме Anbian может поставлять блоки управления двигателями для электромобилей различных категорий мощности по очень привлекательным ценам.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
