Структура дорожек обучения камеры mipi (2)
1. Физический уровень:
Физический уровень определяет среду передачи, электрические характеристики, схемы ввода-вывода и механизмы синхронизации. С точки зрения непрофессионала, это значит указать, как передающая сторона Tx получает закодированные данные с верхнего уровня на самом нижнем физическом уровне протокола MIPI, преобразует их в какой тип электрического сигнала и отправляет их на принимающую сторону Rx посредством того, как сколько каналов/групп каналов и в каком виде и т.д.
Физические уровни CSI и DSI разрабатываются специализированными рабочими группами. В объявленных в настоящее время протоколах существует три типа интерфейсов физического уровня на основе камеры, а именно D-PHY, C-PHY и M-PHY. Среди них самым простым и широко используемым является интерфейс D-PHY версии 1.0, выпущенный в 2009 году.
Чтобы обеспечить более высокую пропускную способность интерфейса и большую гибкость размещения каналов, в CSI-2 v1.3 представлен интерфейс C-PHY. C-PHY 1.0 — это новый физический интерфейс, выпущенный MIPI Alliance в сентябре 2014 года и совместимый с предыдущей версией D-PHY v1.2.
D-PHY и C-PHY являются последовательными интерфейсами. Они решают многие проблемы параллельных интерфейсов, такие как снижение энергопотребления интерфейса и упрощение параллельного расширения. В дополнение к этим двум протоколам физического уровня существует также M-PHY, который представляет собой высокоскоростной интерфейс Serdes с асинхронной передачей. По сравнению с D-PHY он имеет меньше контактов и более высокую скорость передачи сигнала. Он используется в мобильных приложениях. Он не так широко используется, но широко применяется в автомобильной сфере, поэтому мы пока не будем на нем заострять внимание.
2. Два режима работы D-PHY:
Целью проектирования первоначальной версии D-PHY было 500 Мбит/с, D — 500 римскими цифрами (латинскими цифрами), и в честь этого был назван D-PHY. D-PHY — это высокоскоростной синхронный физический уровень с низким энергопотреблением. Благодаря своей высокоэффективной конструкции он очень подходит для использования в устройствах с батарейным питанием и высоким энергопотреблением. D-PHY содержит как высокоскоростные модули, так и модули с низким энергопотреблением, которые помогают достичь высокой эффективности. Полезные данные (данные изображения) используют высокоскоростные модули, а информация управления и состояния передается (между камерой/дисплеем и процессором приложений) с помощью маломощных модулей (использующих низкочастотные сигналы). Он обладает особой способностью отправлять высокоскоростные и маломощные данные в одном пакете. Модули с низким энергопотреблением помогают экономить электроэнергию, а высокоскоростные модули помогают обеспечить более широкую полосу пропускания, необходимую для передачи сигналов данных высокого разрешения фотографического качества.
Физический уровень D-PHY поддерживает два режима передачи: HS (высокая скорость) и LP (низкая мощность). В этих двух режимах используются разные уровни передачи и механизмы передачи.

В режиме HS используется метод синхронной передачи источника, и ведущее устройство передает тактовую частоту DDR ведомому устройству. Используйте дифференциальную сигнализацию.
В режиме LP используется несимметричная передача сигнала, а в режиме HS канал, используемый для дифференциальной передачи, будет разделен на две независимые сигнальные линии.
Независимо от того, является ли это режимом HS или режимом LP, принимается метод передачи: сначала LSB, а потом MSB. Сочетание двух режимов гарантирует, что шина MIPI может передавать на высокой скорости, когда необходимо передать большие объемы данных (например, изображений), и может снизить энергопотребление, когда передача больших объемов данных не требуется.
3. Общая структура переулка:
Первоначальное значение Lane на английском языке — «канал», где мы можем понимать его как канал для передачи информации между двумя разными модулями.
Два чипа, соединенные с помощью D-PHY, соединяются с помощью пар дифференциальных сигналов посередине. На каждом конце приемопередатчика имеется модуль Lane для завершения передачи и приема данных. Модуль Lane и промежуточные соединения вместе образуют полноценный канал передачи данных и являются ядром физического уровня всего протокола. На рисунке ниже представлена принципиальная схема полного модуля двунаправленной передачи данных (называемого Universal Lane в MIPI), который является основным блоком передачи информации D-PHY.
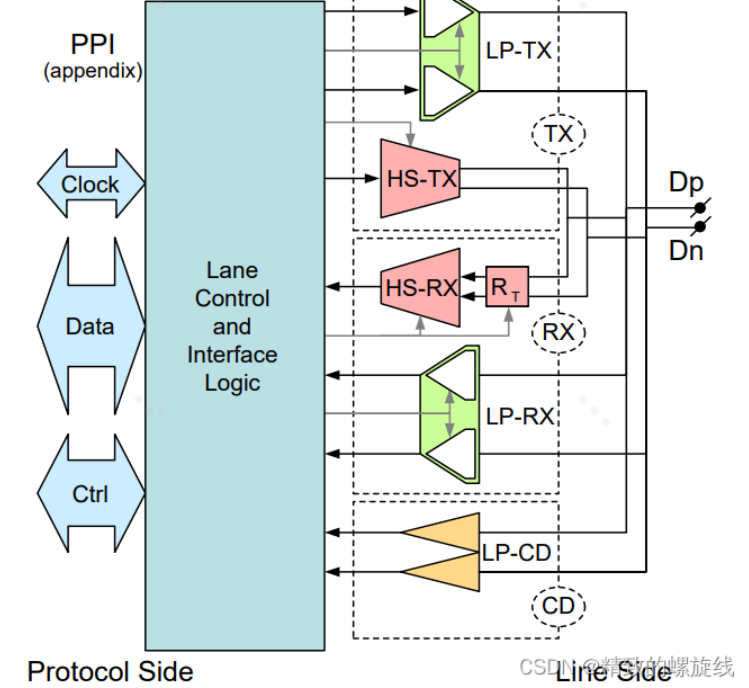
Universal Lane состоит из пары высокоскоростных трансиверов (HS-TX, HS-RX), пары маломощных трансиверов (LP-TX, LP-RX), детектора конфликтов с низким энергопотреблением (LP-CD) и Логическая композиция управления Лейна. Все модули приемопередатчиков используют одну и ту же пару дифференциальных линий Dp и Dn (в режиме LP это две отдельные сигнальные линии). Вся линия связана с другими частями системы через интерфейс PPI (интерфейс протокола PHY).
Двунаправленный: Двунаправленный
Однонаправленный: Однонаправленный
Universal Lane поддерживает двустороннюю связь, и на этой основе упрощаются линии, требующие только односторонней связи. В системах, которым требуется только односторонняя связь, таких как CSI, хосту (обычно фиксированному как передатчик) не нужен модуль RX, а ведомому устройству (обычно фиксированному как приемник) не нужен модуль TX.
Кроме того, даже в системе двусторонней связи сигнал Clock Lane необходимо передавать только от ведущего устройства к ведомому, и никакой обратной передачи не требуется. Когда данные передаются от подчиненного устройства к хосту, тактовая частота DDR по-прежнему предоставляется хостом.
4. Три режима работы линии передачи данных:
Три режима работы линии передачи данных:
- Пакетный режим: высокоскоростной режим.
- Режим управления: Режим управления в режиме низкого энергопотребления.
- Режим побега: режим побега в режиме низкого энергопотребления.
Во время нормальной работы канал данных находится в высокоскоростном режиме или режиме управления. Пакетный режим и режим Escape не могут переключаться напрямую вперед и назад, их необходимо переносить через режим управления, то есть:
Burst Mode ↔ Control Mode ↔ Escape Mode
1. Высокоскоростной режим (режим серийной съемки)
Высокоскоростной режим — это режим в состоянии HS и используется для передачи изображений. В высокоскоростном режиме статус канала имеет дифференциальное значение 0 или 1, то есть, когда Dp выше, чем Dn внутри пары линий, он определяется как 1, когда Dp ниже, чем Dn, он определяется как 0; Типичное линейное напряжение в настоящее время составляет 200 МВ.
2. Режим управления
Режим управления – это режим в состоянии LP. Типичная амплитуда высокого уровня составляет 1,2 В. В это время сигналы на Dp и Dn не являются дифференциальными сигналами, а независимы друг от друга. Когда Dp равно 1,2 В, а Dn также равно 1,2 В, протокол MIPI определяет состояние как LP11; когда Dp равно 1,2 В, а Dn равно 0 В, определяемое состояние — LP10 и т. д. В режиме управления LP11, LP10, и LP01 могут быть сформированы четыре разных состояния LP00.
Протокол MIPI предусматривает, что четыре разных состояния режима управления объединяются в разные временные последовательности, которые используются для обозначения входа или выхода из определенного режима. Например, после последовательности LP11-LP01-LP00 он переходит в высокоскоростной режим.
3. Режим побега
Режим Escape — это специальная операция канала передачи данных в состоянии LP. В этом режиме можно ввести некоторые дополнительные функции: LPDT (режим передачи данных с низким энергопотреблением), ULPS (режим сверхнизкого энергопотребления), Триггер. При входе в режим Escape отправитель должен отправить 8-битную команду для ответа на запрошенное действие.
Data Lane переходит в режим Escape через LP-11→LP-10→LP-00→LP-01→LP-00.
Выход из режима выхода: LP-10→LP-11.
Ссылка на статью: http://t.csdnimg.cn/SN38i.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
