Совместная роботизированная рука с открытым исходным кодом myCobot 630 компании Elephant Robot была полностью обновлена!
1. Введение в главу
В быстро развивающейся области робототехники myCobot 600 от Elephant Robotics доказал свою замечательную пригодность для образования, научных исследований и легкой промышленности. Являясь роботизированной рукой с шестью степенями свободы, myCobot 600 отвечает разнообразным эксплуатационным требованиям благодаря рабочему радиусу 600 мм и конечной нагрузке 2 кг. Однако комбинация трех серводвигателей и трех редукторов гармоник, использованная в оригинальной конструкции, показала ограничения производительности в определенных сценариях применения.
Чтобы всесторонне улучшить производительность и лучше удовлетворить спрос рынка, мы провели глубокую техническую модернизацию myCobot 600, и на свет появился myCobot 630. Это обновление представляет собой не только улучшение существующих функций, но и всестороннюю оптимизацию взаимодействия с пользователем, что позволяет ему демонстрировать превосходную производительность и гибкость в более широком диапазоне сценариев применения. Усовершенствования нового поколения myCobot 630 призваны предоставить пользователям более эффективный и интеллектуальный опыт работы с роботизированной рукой, тем самым способствуя более широкому внедрению инноваций и повышению эффективности в сфере образования и промышленности.
2. Улучшение технологий и производительности.
Далее мы в основном представим это обновление с двух аспектов: один — аппаратный, а другой — программный.
Обновление оборудования
Улучшить механическую структуру
Исходный режим 3+3 (3 серводвигателя + 3 модуля гармонического замедления) был модернизирован до 6 высококачественных модулей гармонического соединения собственной разработки с более высокими характеристиками качества по сравнению с myCobot Pro 600, myCobot Pro 630. Объем. уменьшается на 30%. Даже при уменьшенном объеме максимальная нагрузка в конце все равно может достигать 2 кг.
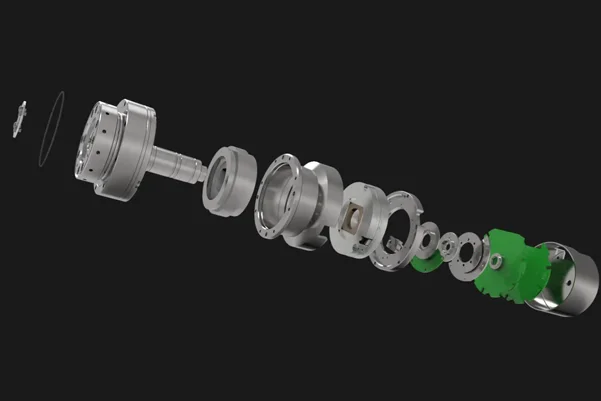
Высокоточные редукторы гармоник используют гибкую деформацию для регулировки передаточного числа. Они обладают характеристиками простой конструкции, высокой точностью, большим крутящим моментом и небольшими размерами. Они часто используются в приложениях, требующих высокой точности и высокого выходного крутящего момента, в основном в промышленности. машиностроение и аэрокосмическая техника.
В связи с этим рабочий радиус недавно обновленного myCobot Pro 630 был увеличен до 630 мм, а точность повторного позиционирования увеличена до 0,1 мм, чтобы удовлетворить больше сценариев применения.

Скачок в производительности
Кроме того, ключевые улучшения производительности, сделанные в myCobot Pro 630, — это не просто количественное увеличение, они провозглашают потенциальные возможности myCobot Pro 630 в промышленных и экспериментальных исследовательских приложениях. Срок службы был значительно увеличен до 10 000 часов, что не только означает пятикратное увеличение цифр, но также означает, что myCobot Pro 630 обещает предоставить пользователям более продолжительное время беззаботной работы. В условиях растущего спроса это улучшение. снижается долговечность. Отпадает необходимость в обслуживании и замене оборудования, что значительно снижает затраты на использование роботизированной руки и повышает непрерывность работы.

Оптимизация скоростей суставов
Максимальная скорость движения суставов также была значительно улучшена. myCobot 630 достиг стандарта 160°/секунду. По сравнению со скоростью 115°/секунду у myCobot 600, это увеличение скорости на 40% подняло отзывчивость машины на новый уровень.

Обновление программного обеспечения
myCobot 630из Обновление программного обеспеченияодинаково впечатляюще,Это не только расширяет эксплуатационные возможности роботизированной руки.,Он также предоставляет пользователям более интуитивно понятный и удобный интерактивный интерфейс. Роботизированная рука оснащена адаптированной операционной системой Linux.,Обеспечивает более стабильную и плавную работу,Это гарантирует, что роботизированная рука сможет продолжать стабильно работать в различных условиях.
Инновации в программном обеспечении управления Roboflow
Программное обеспечение управления Roboflow, оснащенное myCobot 630, представляет собой инновационный шаг вперед. Программное обеспечение поддерживает непрерывные приложения 24 часа в сутки, 7 дней в неделю, а это означает, что будь то долгосрочный процесс промышленной автоматизации или сложный исследовательский проект, myCobot 630 может выполнять задачи без перерыва. Пользовательский интерфейс программного обеспечения Roboflow был тщательно разработан, чтобы сделать написание и эксплуатацию программ более простыми и удобными, и даже непрофессионалы могут быстро освоить его.

Поддержка основных языков программирования и сред разработки.
Кроме того, по сравнению с myCobot 600, в myCobot 630 также расширена поддержка языков программирования и сред разработки. Он не только поддерживает распространенные языки Python и C++, но также включает полную поддержку ROS1 и ROS2. Это обеспечивает большое удобство для учащихся и разработчиков роботов, позволяя беспрепятственно выполнять на myCobot 630 все — от простого программирования до разработки сложной операционной системы робота. Для исследователей и разработчиков такая поддержка значительно расширяет сферу их исследований и приложений в области искусственного интеллекта, машинного обучения и автоматизации.

Интеграция и масштабируемость
Открытый интерфейс управления myCobot 630 позволяет пользователям легко интегрировать несколько устройств и модулей. Мы также подобрали различные концевые исполнительные механизмы, такие как захваты, модули технического зрения и т. д.

Предоставляет 4 интерфейса USB, 2 промышленных интерфейса RS485, 1 EtherNet/IP, 12 интерфейсов ввода-вывода 24 В и другие периферийные интерфейсы. Такая масштабируемость не только обеспечивает возможность индивидуальных решений, но также гарантирует, что myCobot 630 сможет адаптироваться к будущим разработкам технологий и соответствовать требованиям. растущие потребности различных приложений.
Сценарии применения
Далее мы воспользуемся несколькими практическими примерами, чтобы изучить, как myCobot Pro 630 демонстрирует свои выдающиеся возможности в различных средах.
Сценарий 1: классификация и захват с использованием трехмерного изображения
В быстро развивающейся 3C-индустрии,Мелкие детали часто смешиваются друг с другом.,Создание хаоса на рабочем месте,Запчасти сложно найти быстро и точно. В ответ на эту проблему,Мы разработали специальные Сценарии применения: используя технологию машинного зрения для точной классификации деталей. Благодаря широкому применению технологии 3D-камеры,Они могут напрямую измерять различные размерные данные объектов с помощью встроенных алгоритмов.,Сложены ли предметы или разбросаны в различных странных позах,может точно определять свойства предметов.
Здесь мы видим, что в ходе обучения модели детали тщательно делятся на четыре категории. Благодаря специально разработанному обучающему набору система может быстро идентифицировать и классифицировать детали. Этот случай в полной мере демонстрирует идеальное сочетание управления движением роботизированной руки, машинного зрения и технологии глубокого обучения, обеспечивая яркий пример автоматизации и интеллекта в индустрии 3C. Он демонстрирует, как интеграция передовых технологий может эффективно улучшить функциональность и производительность промышленных операций.
Сценарий 2: Применение композитного робота в сочетании с AGV
Чтобы расширить диапазон применения роботизированного манипулятора и преодолеть ограничение его рабочего радиуса, мы можем установить его на мобильную платформу, например, на автоматизированное управляемое транспортное средство (АГВ), оснащенное радаром SLAM. Такая конфигурация не только повышает гибкость роботизированной руки, но и расширяет ее рабочие возможности в различных средах.
Настройка манипулятора на мобильном роботе может значительно расширить его функциональные возможности. Например, он может выполнять логистические операции на складах или выполнять задачи по перемещению в фиксированной точке и погрузочно-разгрузочным работам на заводах. Такое сочетание не только повышает эффективность работы, но и повышает эксплуатационную гибкость.
AGV, оснащенные радаром SLAM, могут выполнять эффективную навигацию и избегать препятствий, что позволяет использовать роботизированную руку не только в обычных рабочих условиях, но также в особых или экстремальных условиях, таких как зоны стихийных бедствий после землетрясений. В этих сценариях AGV могут автономно перемещаться по грудам обломков, а роботизированное оружие может использоваться для поиска и спасения и даже для транспортировки и распределения предметов первой необходимости.

Сцена 3: Художественное творчество под руководством G-кода
Роботизированное оружие не только занимает важное место в промышленной сфере, но и демонстрирует уникальное очарование в художественном творчестве. С помощью языка программирования G-кода можно точно контролировать траекторию движения, скорость и другие параметры роботизированной руки для достижения точного художественного творчества.
Представьте, что вы находитесь на улице, и традиционный уличный художник может быстро поймать и нарисовать ваше изображение. Теперь, если для выполнения такой живописи будет использоваться роботизированная рука, ее новизна и техническое содержание могут открыть новую перспективу в художественном творчестве. Роботизированная рука может не только воспроизводить изящные портреты, но и добавлять запрограммированные элементы в процесс рисования для создания уникальных произведений искусства.
Применение этой технологии делает роботизированную руку инновационным инструментом художественного творчества, способным построить мост между традиционными и современными технологиями. Роботизированная рука, способная рисовать, — это не только технический экспонат, но и яркое воплощение интеграции искусства и технологий, открывающее новую область художественного самовыражения. Подобные приложения не только повышают интерес к художественному творчеству, но и способствуют исследованию и применению инновационных технологий в нетрадиционных областях.

Подвести итог
Обновление myCobot Pro 630 не только повышает производительность, но и расширяет его практичность в области промышленной автоматизации, художественного творчества и применения в особых условиях, демонстрируя гибкость и инновационный потенциал современной технологии роботизированных манипуляторов.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
