ROS2 скромная версия установки-chatgpt
Это может быть неуместно, если вы используете версию Chatgpt. Обязательно посетите официальный сайт.
ROS (Robot Operating System) Это операционная система для роботов с открытым исходным кодом, которая предоставляет ряд программных библиотек и инструментов для создания приложений для роботов. Нижеследующее находится в Ubuntu Установить в систему ROS Humble Подробные шаги и методы: Во-первых, убедитесь, что ваш Ubuntu Версия системы 16.04 (Xenial) или выше и иметь установленные необходимые зависимости. Вы можете использовать следующие команды для обновления вашей системы и установки необходимых зависимостей: копировать sudo apt-get update sudo apt-get upgrade sudo apt-get install curl gnupg2 lsb-release добавить в ROS библиотеку программного обеспечения, чтобы ее можно было получить из ROS пакет программного обеспечения. Введите в терминал следующую команду: копировать sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' добавить в ROS Открытый ключ для загрузки пакета программного обеспечение при проверке. Введите следующую команду, чтобы добавить в ROS Ключ: копировать curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - Обновите список пакетов, чтобы в ROS Найдите доступные пакеты в репозитории программного обеспечения: копировать sudo apt-get update Установить ROS Полная настольная версия (включает часто используемые инструменты, библиотеки и ROS). Инструменты визуализации): копировать sudo apt-get install ros-humble-desktop-full инициализация ROS среду, чтобы ее можно было использовать в терминале. Введите в терминал следующую команду: копировать echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc source ~/.bashrc Установить rosdep,используется для Установить ROS Зависимости пакета. Введите в терминал следующую команду: копировать sudo apt-get install python-rosdep инициализация росдеп, чтобы всё заработало: копировать sudo rosdep init rosdep update Наконец, проверьте ROS Если установка прошла успешно, введите следующую команду: копировать roscore Если сообщение об ошибке не появляется,объясните ROS Установитьуспех。 Вышеупомянутое находится в Ubuntu Установить в систему ROS Humble Подробные шаги и методы, надеюсь, это поможет вам.
При вопросе нужно различать ROS и ROS2. Еще один ответ:
ROS2 Humble — один из дистрибутивов ROS2из, следующий — УстановитьROS2. HumbleПодробные шаги и методы: добавить вROS2 Скромный склад копировать sudo apt update sudo apt install curl gnupg2 lsb-release curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2-humble/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-humble.list' УстановитьROS2 Humble копировать sudo apt update sudo apt install ros-humble-desktop инициализация среды ROS2 копировать source /opt/ros/humble/setup.bash Проверить ROS2Установить Выполните следующую команду, чтобы убедиться, что ROS2 прошел успешно: копировать ros2 doctor Если ROS2Установить удалось, отобразится сообщение об успехе. УстановитьROS2 Дополнительные инструменты и пакеты для Humble В дополнение к базовому ROS2 Помимо пакета Humble Desktop, существуют также «Установитьдругой» инструменты и пакеты для лучшего использования ROS2. Например, вы можете использовать следующую команду Установить ROS2 Инструменты визуализации Humble: копировать sudo apt install ros-humble-rqt sudo apt install ros-humble-rviz2 Вот и все УстановитьROS2 Подробные шаги и методы Humble
Тестовая версия системы Ubuntu 22.04.1 LTS:

Установить После завершения:
Настройте удаленный вход:
4 sudo apt install xrdp
5 sudo systemctl restart xrdp
6 sudo ufw allow form any to any port 3389
7 sudo ufw allow from any to any port 3389
8 sudo ufw allow 3389
9 sudo systemctl restart xrdp
10 sudo ufw allow from any to any port 3389
11 sudo ufw allow 3389Установитьвсеинструкция:
17 locale # check for UTF-8
18 sudo apt update && sudo apt install locales
19 sudo locale-gen en_US en_US.UTF-8
20 sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
21 export LANG=en_US.UTF-8
22 locale # verify settings
23 sudo apt install software-properties-common
24 sudo add-apt-repository universe
25 sudo apt update && sudo apt install curl
26 sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
27 echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
28 sudo apt update
29 sudo apt upgrade
30 sudo apt install ros-humble-desktop
31 sudo apt install ros-dev-tools
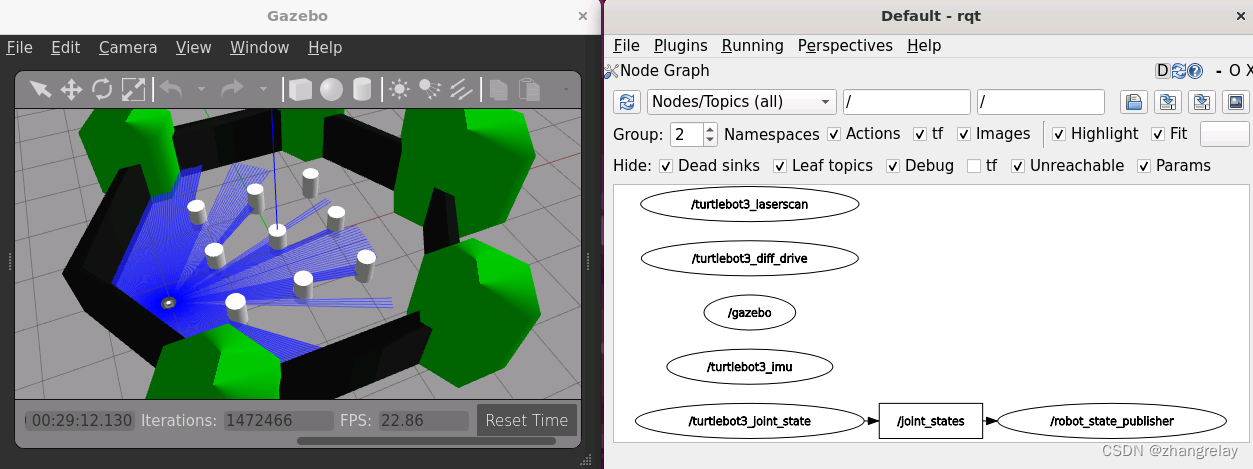
32 sudo apt install ros-humble-turtlebot3-gazebo ros-humble-turtlebot3-simulations
33 source /opt/ros/humble/setup.bash
34 ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
35 export TURTLEBOT3_MODEL=burger
36 ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py Официальный сайт по-прежнему хорошо пахнет!
http://docs.ros.org/en/humble/Installation.htmlУстановить локаль
Убедитесь, что у вас есть поддержка . Если вы находитесь в минимальной среде (например, в Docker-контейнере), языковой стандарт может иметь минимальное значение, например . Для проверки используйте следующие настройки. Однако, если вы используете другую локаль, поддерживаемую UTF-8, все будет в порядке. UTF-8POSIX
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings
Установить источник
нужно ROS 2 apt Репозиторий добавить система вприжатез.
Сначала убедитесь, что репозиторий Ubuntu Universe включен.
sudo apt install software-properties-common
sudo add-apt-repository universe
Сейчасдобавить в С apt из ROS 2 GPG ключ.
sudo apt update && sudo apt install curl
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
а потом Репозиторий добавить вприжать список источников.
echo "deb [arch=
Установите пакеты ROS 2
Обновите кеш репозитория apt после настройки репозитория.
sudo apt update
ROS 2 пакет программного программное обеспечение построено на частых обновлениях Ubuntu в системе. Всегда рекомендуется при установке нового пакета. программного прежде чем убедиться, что система обновлена.
sudo apt upgrade
предупреждать
потому что Ubuntu 22.04 Ранние обновления в Установить ROS 2 Ранее обновлено с помощью --Связанный пакет программного обеспеченияочень важно。 в новом Установитьизв системе Установить ROS 2 из依赖项而不进行升级可能会触发关键系统пакет программного обеспеченияизудалить。systemdudev
Для получения дополнительной информации см. ros2/ros2#1272 и панель запуска #1974196.
рабочий стол Установить(рекомендовать):ROS,RViz,Демо,Учебник.
sudo apt install ros-humble-desktop
ROS Базовая установка (пустая версия): библиотека связи, пакет сообщений, инструменты командной строки. Инструменты графического интерфейса пользователя отсутствуют.
sudo apt install ros-humble-ros-base
Инструменты разработки: используются для создания ROS Сумкаизкомпилятор идругойинструмент
sudo apt install ros-dev-tools
Настройки среды
Получить скрипт установки
Настройте среду, получив следующие файлы.
# Replace ".bash" with your shell if you're not using bash# Possible values are: setup.bash, setup.sh, setup.zshsource /opt/ros/humble/setup.bashПопробуйте несколько примеров
публиковать-подписаться
Если ты Установитьсверху,ты можешь Попробуйте несколько примеров。ros-humble-desktop
В терминале получите файл Установить и запустите C++: talker
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_cpp talkerПолучите файл установки в другом терминале и запустите Python :listener.
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_py listenerВам следует прочитать «Приезжать вот так» из заявления,то есть это сообщение,И расскажите эти сообщения. Это проверит C++ и Python API правильно ли он работает. Да здравствует!
Дальнейшие действия после установки
Продолжить обучение и Демо,для настройки среды, создания собственного рабочего пространства и пакетов,и понять ROS 2 Основные понятия.
Использование моста ROS 1
ROS 1 Мост может ROS 1 приезжать ROS 2 из тем связаны между собой и наоборот. См. информацию о том, как построить и использовать моста ROS 1из Специальная документация.
Другие реализации RMW (необязательно)
ROS 2 использоватьиз Промежуточное программное обеспечение по умолчанию , но промежуточное программное обеспечение (RMW) Может быть заменен во время выполнения. Узнайте, как использовать несколько RMW из руководства. Быстрый DDS
Поиск неисправностей
Технологию приезжать Поиск неисправностей можно найти на официальной вики.
удалить
При необходимости удалить ROS 2 Или переключиться на основе исходного кода из Установить один раз Из двоичного файла Установить выполните следующую команду:
sudo apt remove ~nros-humble-* && sudo apt autoremoveВы также можете удалить репозиторий:
sudo rm /etc/apt/sources.list.d/ros2.list
sudo apt update
sudo apt autoremove
# Consider upgrading for packages previously shadowed.
sudo apt upgrade


Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
