ROS делает разработку роботов более удобной и выпущен на базе системы RK3568J+Debian!
Что такое система ROS
ROS (Операционная система робота) — это метаоперационная система с открытым исходным кодом, подходящая для роботов. Он предоставляет услуги, которые должна иметь операционная система, включая аппаратную абстракцию, низкоуровневое управление устройствами, реализацию общих функций, передачу сообщений между процессами и управление пакетами. Он также предоставляет инструменты и библиотечные функции, необходимые для получения, компиляции, написания и запуска кода на компьютерах.

Благодаря быстрому развитию промышленного интеллекта интеллектуальное роботизированное оборудование стало лидером в системах промышленной автоматизации. Ядро интеллектуального роботизированного оборудования, система ROS, является лидером в области роботов и в основном используется в области управления роботами. такие как контроллеры промышленных роботов AGV, интеллектуальный контроллер роботизированной руки, система навигации робота и т. д.
Каковы основные особенности системы ROS?
(1) Предоставить богатую библиотеку алгоритмов роботов.
Различные элементы управления и коммуникации роботов неотделимы от поддержки библиотек алгоритмов. Система ROS предоставляет богатую и мощную библиотеку алгоритмов роботов, таких как преобразование координат, управление движением и т. д. Разработчики роботов могут просто и быстро вызывать соответствующие библиотеки алгоритмов в зависимости от потребностей разработки, чтобы повысить эффективность разработки и ускорить процесс разработки.
(2) Открытый исходный код и бесплатная оптимизированная архитектура.
Система ROS — это бесплатная и оптимизированная операционная система для роботов с открытым исходным кодом. ROS спроектирован максимально упрощенным, чтобы код, написанный для ROS, можно было использовать с другими программными платформами для робототехники, такими как ROS, интегрированная с OpenRAVE, Orocos и Player. Именно из-за этой характеристики во всем мире множество людей исследуют и разрабатывают системы АФК, создавая ситуацию, когда «распускаются сотни цветов, а семьи ссорятся», что делает АФК все более мощными. «Открытая, бесплатная и оптимизированная архитектура» также означает, что затраты на разработку продукта могут быть значительно снижены, циклы разработки продукта могут быть сокращены, а эффективность разработки продукта может быть повышена.
(3) Поддержка управления и связи в реальном времени, безопасность и надежность данных.
Сегодняшняя система ROS поддерживает управление и связь в реальном времени, а данные безопасны и надежны. «Реальное время» и «безопасность» являются обычными задачами в современной индустрии промышленной автоматизации, особенно при разработке AGV, если управление и связь главного контроллера AGV робота, радара, камеры, GPS и других компонентов могут осуществляться в реальном времени и безопасно. , Невыполнение этого требования приведет к серьезным последствиям, таким как утечка основных данных, отклонение управления маршрутом и сбои в системе связи. Благодаря своим преимуществам система ROS стала мощным инструментом для разработки AGV, широко используется при разработке различных роботов и постепенно стала основной.
RK3568J + демонстрационный пример системы Debian ROS2
Chuanglong Technology SOM-TL3568 — это четырехъядерная бытовая промышленная базовая плата ARM Cortex-A55, разработанная на базе процессора Rockchip RK3568J/RK3568B2, с основной частотой до 2,0 ГГц. Все компоненты, такие как процессор основной платы, ПЗУ, ОЗУ, блок питания, кварцевый генератор и разъемы, используют отечественные решения промышленного уровня со 100% степенью локализации, и предоставляется отчет о сертификации степени локализации.
Файл образа запуска системы ROS update.img, предоставляемый платформой RK3568J нашей компании, находится в каталоге информации о продукте «4-Software Information\Demo\platform-demos\ros2_foxy\bin». См. раздел «Производство стартовой карты системы Linux». Сначала документ «System Solidification», используйте файл образа update.img для создания загрузочной карты SD (т. е. загрузочной карты системы ROS) с помощью «Rockchip Create Upgrade Disk Tool», а затем вставьте загрузочную карту SD в оценочную плату Micro. Слот для SD-карты. Систему также можно закрепить на eMMC с помощью карты обновления SD или метода закрепления через USB.
Демонстрация коммуникации на основе языка Python
Функция Case: на основе языка Python запустите узел ROS для публикации и подписки на сообщения, а также реализуйте связь в реальном времени между узлом сообщений о подписке и узлом сообщений публикации.
Включите оценочную плату и выполните следующую команду, чтобы настроить среду тестирования оценочной платы.
Target#export COLCON_CURRENT_PREFIX=/opt/ros
Target# source /opt/ros/local_setup.sh

Выполните следующую команду, чтобы запустить узел ROS для подписки на сообщения.
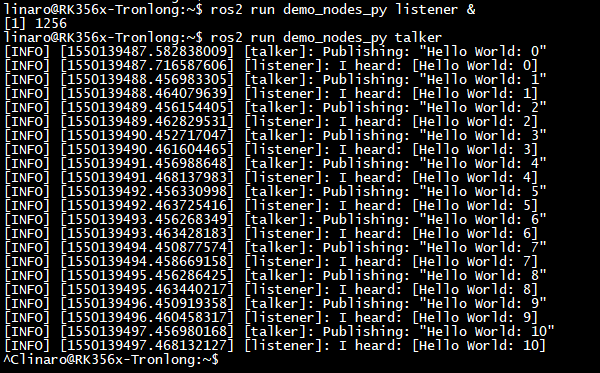
Target# ros2 run demo_nodes_py listener &

Выполните следующую команду, чтобы запустить узел ROS для публикации сообщений и реализовать связь между подписывающимся узлом сообщений и узлом публикующих сообщений. В это время терминал отладки последовательного порта оценочной платы распечатает информацию о связи между двумя узлами, как показано на рисунке ниже. Нажмите «Ctrl+C», чтобы выйти из тестовой программы, то есть позволить узлу, опубликовавшему сообщение, выйти.
Target# ros2 run demo_nodes_py talker
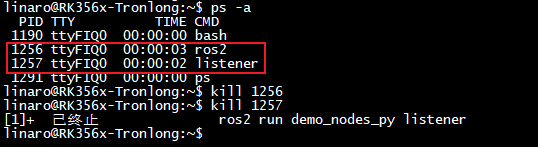
Выполните следующую команду, чтобы просмотреть и завершить работу всех узлов ROS в соответствии с номером системного процесса. Пожалуйста, обратитесь к фактической ситуации для номера процесса.
Target# ps -a
Target# kill 1256
Target# kill 1257
Демонстрация связи на основе языка C++
Функция Case: на основе языка C++ запускайте узлы ROS для публикации и подписки сообщений, а также реализуйте связь в реальном времени между подписывающимися узлами сообщений и узлами публикующих сообщений.
Включите оценочную плату и выполните следующую команду, чтобы настроить среду тестирования оценочной платы.
Target#export COLCON_CURRENT_PREFIX=/opt/ros
Target# source /opt/ros/local_setup.sh
Выполните следующую команду, чтобы запустить узел ROS для подписки на сообщения.
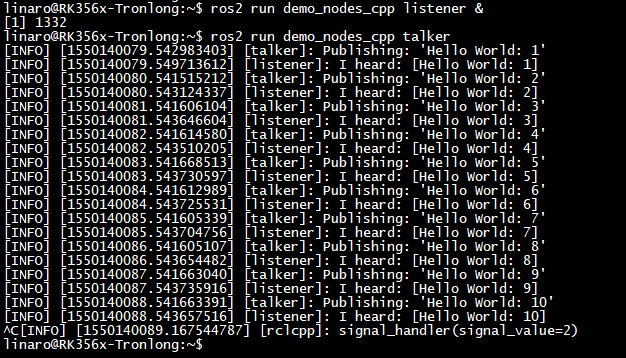
Target# ros2 run demo_nodes_cpp listener &
Выполните следующую команду, чтобы запустить узел ROS для публикации сообщений и реализовать связь между подписывающимся узлом сообщений и узлом публикующих сообщений. В это время терминал отладки последовательного порта оценочной платы распечатает информацию о связи между двумя узлами, как показано на рисунке ниже. Нажмите «Ctrl+C», чтобы выйти из тестовой программы, то есть позволить узлу, опубликовавшему сообщение, выйти.
Target# ros2 run demo_nodes_cpp talker
Выполните следующую команду, чтобы завершить работу всех узлов ROS в соответствии с номером системного процесса. Пожалуйста, обратитесь к фактической ситуации для номера процесса.
Target# ps -a
Target# kill 1332
Target# kill 1333




Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
