Роль и преимущества операционной системы реального времени (RTOS) в разработке встраиваемых систем.
Роль и преимущества операционной системы реального времени (RTOS) в разработке встраиваемых систем.
Встраиваемые системы стали неотъемлемой частью нашей повседневной жизни: от смартфонов до систем управления автомобилем, от бытовой техники до медицинского оборудования — встраиваемые системы есть повсюду. Этим системам часто приходится соблюдать строгие ограничения по времени, чтобы реагировать на события и сигналы датчиков в режиме реального времени. Чтобы удовлетворить этим требованиям, разработчики встраиваемых систем часто полагаются на операционные системы реального времени (RTOS), которые обеспечивают эффективный способ управления системными ресурсами и обработки многозадачности.
Что такое RTOS?
RTOS — это операционная система, специально разработанная для встроенных систем. Ее основная цель — обеспечить предсказуемость и производительность в реальном времени. В отличие от операционных систем общего назначения (таких как Windows или Linux), RTOS ориентирована на решение задач реального времени, таких как управление, связь и сбор данных. Ниже приведены роли и преимущества RTOS в разработке встроенных систем.
1. Многозадачность
RTOS позволяет встроенным системам выполнять несколько задач одновременно. Эти задачи могут выполняться в жестком режиме реального времени (должны быть выполнены в течение определенного времени) или в мягком режиме реального времени (лучше всего выполняться в течение определенного времени). RTOS управляет планированием и приоритетом задач, чтобы обеспечить достаточное время обработки высокоприоритетным задачам. Ниже приведен простой пример кода RTOS, демонстрирующий, как создать и запланировать две задачи:
#include <RTOS.h>
void Task1(void* param) {
while (1) {
// Выполнить задания 1
}
}
void Task2(void* param) {
while (1) {
// Выполнить задания 2
}
}
int main() {
RTOS_Init();
RTOS_CreateTask(Task1, NULL, PriorityHigh);
RTOS_CreateTask(Task2, NULL, PriorityLow);
RTOS_Start();
return 0;
}2. Реакция в режиме реального времени
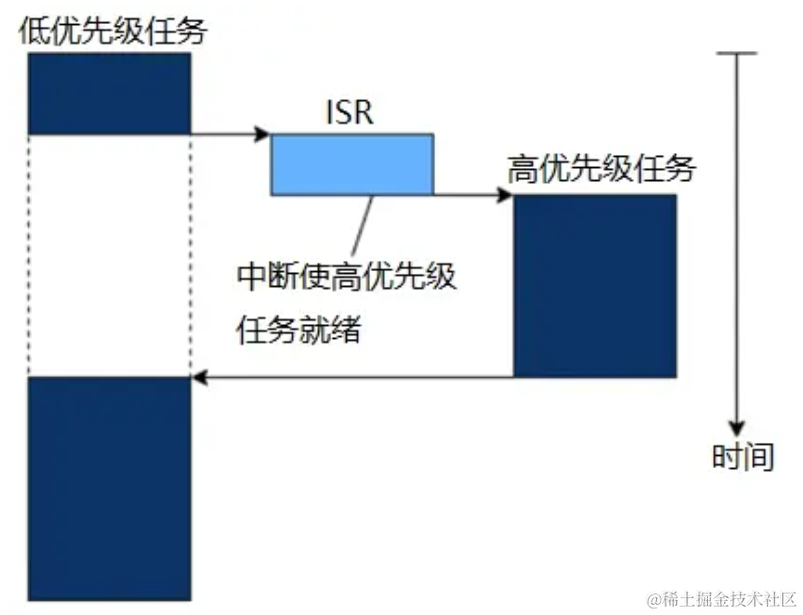
Одной из целей разработки RTOS является реагирование в реальном времени. Встроенным системам часто необходимо реагировать на внешние события, такие как данные датчиков или ввод пользователя, в течение определенного периода времени. ОСРВ может гарантировать, что задачи обрабатываются в соответствии с их приоритетами для удовлетворения требований реального времени.
3. Синхронизация задач и связь
Во встроенных системах задачам часто необходимо обмениваться данными или работать вместе. RTOS предоставляет различные механизмы для синхронизации и связи между задачами, такие как семафоры, очереди сообщений и блокировки мьютексов. Эти механизмы помогают избежать состояний гонки и обеспечить согласованность данных.
#include <RTOS.h>
Semaphore_t sem;
void Task1(void* param) {
while (1) {
// Выполнить задания 1
RTOS_AcquireSemaphore(&sem);
// Операции с общими ресурсами
RTOS_ReleaseSemaphore(&sem);
}
}
void Task2(void* param) {
while (1) {
// Выполнить задания 2
RTOS_AcquireSemaphore(&sem);
// Операции с общими ресурсами
RTOS_ReleaseSemaphore(&sem);
}
}
int main() {
RTOS_Init();
RTOS_CreateSemaphore(&sem, 1);
RTOS_CreateTask(Task1, NULL, PriorityHigh);
RTOS_CreateTask(Task2, NULL, PriorityLow);
RTOS_Start();
return 0;
}4. Экономьте ресурсы
ОСРВ обычно разрабатываются как облегченные, чтобы уменьшить объем памяти и нагрузку на процессор. Это очень важно для встраиваемых систем с ограниченными ресурсами. ОСРВ обычно включает только необходимые функции, что снижает ненужные накладные расходы.
5. Масштабируемость
ОСРВ обычно расширяема, что позволяет разработчикам добавлять новые задачи или функциональные модули в соответствии с потребностями проекта. Такая гибкость делает RTOS идеальной для работы со встроенными системами, которые постоянно развиваются и меняются. Разработчики могут добавлять новые задачи по мере необходимости без необходимости вносить фундаментальные изменения во всю систему.
#include <RTOS.h>
void NewTask(void* param) {
while (1) {
// Выполнение новых операций задачи
}
}
int main() {
RTOS_Init();
RTOS_CreateTask(Task1, NULL, PriorityHigh);
RTOS_CreateTask(Task2, NULL, PriorityLow);
// Добавляйте новые задачи во время выполнения проекта
RTOS_CreateTask(NewTask, NULL, PriorityMedium);
RTOS_Start();
return 0;
}Когда дело доходит до роли и преимуществ RTOS (операционной системы реального времени) в разработке встраиваемых систем, предоставление большего количества примеров кода может лучше прояснить ее важность. Ниже приведены дополнительные примеры кода, охватывающие приложения RTOS для управления задачами, синхронизации, связи и производительности в реальном времени.
#include <RTOS.h>
// Определить дескриптор задачи
TaskHandle_t Task1Handle;
TaskHandle_t Task2Handle;
// Функция задачи 1
void Task1(void* param) {
while (1) {
// Выполнить задания 1
vTaskDelay(pdMS_TO_TICKS(100)); // Задержка 100 миллисекунд
}
}
// Функция задачи 2
void Task2(void* param) {
while (1) {
// Выполнить задания 2
vTaskDelay(pdMS_TO_TICKS(50)); // Задержка 50 миллисекунд
}
}
int main() {
// Инициализировать ОСРВ
xTaskCreate(Task1, "Task1", configMINIMAL_STACK_SIZE, NULL, 2, &Task1Handle);
xTaskCreate(Task2, "Task2", configMINIMAL_STACK_SIZE, NULL, 1, &Task2Handle);
vTaskStartScheduler();
return 0;
}В приведенном выше примере кода в качестве RTOS используется FreeRTOS.,Показывает, как создать две задачи.(Task1иTask2),и использоватьvTaskDelayЗадержка задачи реализации функции。Эти задачи имеют разные приоритеты,Задача 1 имеет более высокий приоритет,Таким образом, оно будет выполнено перед задачей 2.
Кроме того, вот простой пример, показывающий, как использовать семафоры для синхронизации и связи между задачами:
#include <RTOS.h>
SemaphoreHandle_t sem;
void Task1(void* param) {
while (1) {
// Выполнить задания 1
xSemaphoreTake(sem, portMAX_DELAY);
// Операции с общими ресурсами
xSemaphoreGive(sem);
}
}
void Task2(void* param) {
while (1) {
// Выполнить задания 2
xSemaphoreTake(sem, portMAX_DELAY);
// Операции с общими ресурсами
xSemaphoreGive(sem);
}
}
int main() {
// Инициализировать ОСРВ
sem = xSemaphoreCreateBinary();
xSemaphoreGive(sem); // Инициализировать семафор
xTaskCreate(Task1, "Task1", configMINIMAL_STACK_SIZE, NULL, 2, NULL);
xTaskCreate(Task2, "Task2", configMINIMAL_STACK_SIZE, NULL, 1, NULL);
vTaskStartScheduler();
return 0;
}В этом примере показано, как использовать семафоры FreeRTOS, чтобы гарантировать, что две задачи не получат доступ к общему ресурсу одновременно. xSemaphoreTakeИспользуется для получения семафора,xSemaphoreGiveИспользуется для освобождения семафора。
Чтобы продемонстрировать роль и преимущества RTOS, ниже приведен пример, демонстрирующий, как использовать очереди сообщений для обеспечения связи и передачи данных между задачами:
#include <RTOS.h>
// Определить дескриптор очереди сообщений
QueueHandle_t messageQueue;
// Функция задачи 1
void Task1(void* param) {
while (1) {
// Получить данные из очереди сообщений
int data;
xQueueReceive(messageQueue, &data, portMAX_DELAY);
// Выполнить задания 1,Использовать полученные данные
}
}
// Функция задачи 2
void Task2(void* param) {
while (1) {
// Генерировать данные
int data = generateData();
// Отправить данные в очередь сообщений
xQueueSend(messageQueue, &data, portMAX_DELAY);
// Выполнить задания 2
}
}
int main() {
// Инициализировать ОСРВ
messageQueue = xQueueCreate(10, sizeof(int)); // Создайте очередь сообщений размером 10.
xTaskCreate(Task1, "Task1", configMINIMAL_STACK_SIZE, NULL, 2, NULL);
xTaskCreate(Task2, "Task2", configMINIMAL_STACK_SIZE, NULL, 1, NULL);
vTaskStartScheduler();
return 0;
}В этом примере используется очередь сообщений FreeRTOS для передачи данных между двумя задачами. Задача 2 генерирует данные и отправляет их в очередь сообщений, задача 1 получает данные из очереди сообщений и использует их.
Наконец, работа в режиме реального времени и предсказуемость RTOS имеют решающее значение для встроенных систем. RTOS гарантирует, что задачи планируются в соответствии с их приоритетами для удовлетворения требований реального времени. Настройки приоритета в примере отражают различные требования в реальном времени между разными задачами.
Важность и преимущества RTOS в управлении задачами, синхронизации, коммуникации, управлении ресурсами в режиме реального времени. При разработке встраиваемых систем выбор подходящей ОСРВ и правильных функциональных компонентов имеет решающее значение для успешного создания надежной встраиваемой системы. Это не только может повысить эффективность разработки, но и обеспечить стабильную работу системы в различных областях применения.
6. Отладка и анализ производительности
RTOS обычно предоставляет богатые инструменты отладки и функции анализа производительности, которые помогают разработчикам выявлять и решать проблемы. Эти инструменты помогают разработчикам контролировать выполнение задач во время работы системы, выявлять конфликты за ресурсы и выявлять узкие места в производительности для оптимизации.
7. Поддержите экосистему
Многие ОСРВ имеют сильную поддержку сообщества и экосистемы. Это означает, что разработчики могут легко найти документацию, примеры кода и сторонние библиотеки, чтобы ускорить процесс разработки. К популярным RTOS относятся FreeRTOS, uC/OS, VxWorks и т. д., каждая из которых пользуется широкой поддержкой сообщества.
8. Экономьте энергию
Встроенные системы часто ограничены сроком службы батареи и энергоэффективностью, поэтому экономия энергии является важным фактором. Функции планирования задач и спящего режима RTOS могут помочь снизить энергопотребление системы. Когда нет задач, подлежащих выполнению, RTOS может перевести процессор в состояние сна, чтобы снизить энергопотребление, и быстро вывести процессор из спящего режима, когда задачи могут быть выполнены.
#include <RTOS.h>
void Task1(void* param) {
while (1) {
// Выполнить задания 1
vTaskDelay(pdMS_TO_TICKS(100));
}
}
void Task2(void* param) {
while (1) {
// Выполнить задания 2
vTaskDelay(pdMS_TO_TICKS(50));
}
}
int main() {
// Инициализировать ОСРВ
xTaskCreate(Task1, "Task1", configMINIMAL_STACK_SIZE, NULL, 2, NULL);
xTaskCreate(Task2, "Task2", configMINIMAL_STACK_SIZE, NULL, 1, NULL);
vTaskStartScheduler();
return 0;
}Приведенный выше пример также демонстрирует, как использоватьRTOSфункция гибернации для продления срока службы батареи。Задача проходит после выполненияvTaskDelayФункция сна,Уменьшено активное время процессора,Это снижает энергопотребление.
9. Требования реального времени
Многие приложения во встроенных системах должны соответствовать требованиям реального времени. Например, системы управления полетом должны реагировать на данные датчиков за миллисекунды, а медицинское оборудование должно обеспечивать своевременный мониторинг жизненно важных показателей. RTOS предоставляет функции приоритета задач и планирования в реальном времени, чтобы гарантировать, что высокоприоритетные задачи обрабатываются в первую очередь для удовлетворения требований реального времени.
#include <RTOS.h>
void RealTimeTask(void* param) {
while (1) {
// Операции, выполняющие задачи в реальном времени
vTaskDelay(pdMS_TO_TICKS(5)); // Задержка 5 миллисекунд
}
}
void BackgroundTask(void* param) {
while (1) {
// Выполнение фоновых задач
vTaskDelay(pdMS_TO_TICKS(50)); // Задержка 50 миллисекунд
}
}
int main() {
// Инициализировать ОСРВ
xTaskCreate(RealTimeTask, "RealTimeTask", configMINIMAL_STACK_SIZE, NULL, 2, NULL);
xTaskCreate(BackgroundTask, "BackgroundTask", configMINIMAL_STACK_SIZE, NULL, 1, NULL);
vTaskStartScheduler();
return 0;
}В этом примере,RealTimeTaskЗадачи имеют более высокий приоритет,и имеет меньшую задержку,чтобы обеспечить работу в режиме реального времени。BackgroundTaskЗадача имеет более низкий приоритет,Увеличьте время фоновой обработки.
10. Безопасность
Многим приложениям во встроенных системах требуется высокая степень безопасности для защиты конфиденциальных данных и функций системы от угроз. RTOS обычно предоставляет функции изоляции задач и защиты памяти, чтобы обеспечить изоляцию данных между задачами и безопасность системы.
#include <RTOS.h>
void SecureTask(void* param) {
// Выполнять операции, требующие защиты
}
int main() {
// Инициализировать ОСРВ,Настройка изоляции задач и защиты памяти
xTaskCreate(SecureTask, "SecureTask", configMINIMAL_STACK_SIZE, NULL, 2, NULL);
vTaskStartScheduler();
Возврат 0;
}в заключение
Операционная система реального времени (RTOS) играет жизненно важную роль в разработке встроенных систем, предоставляя множество преимуществ, таких как многозадачность, реагирование в реальном времени, синхронизация и связь задач, управление ресурсами, энергосбережение, работа в режиме реального времени и безопасность. Разработчики встраиваемых систем могут использовать RTOS для создания эффективных, стабильных, работающих в режиме реального времени и безопасных встраиваемых систем, отвечающих потребностям различных областей применения: от промышленного управления до медицинского оборудования, от систем управления автомобилем до умных домов. Понимание и освоение использования RTOS имеет решающее значение для успешной разработки сложных встроенных систем. Оно может улучшить предсказуемость, удобство обслуживания и масштабируемость системы для удовлетворения меняющихся потребностей рынка.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
