Разработка облегченной системы OpenHarmony【13】Разработка автомобиля в Хунмэне
13.1 Знакомство с автомобилем
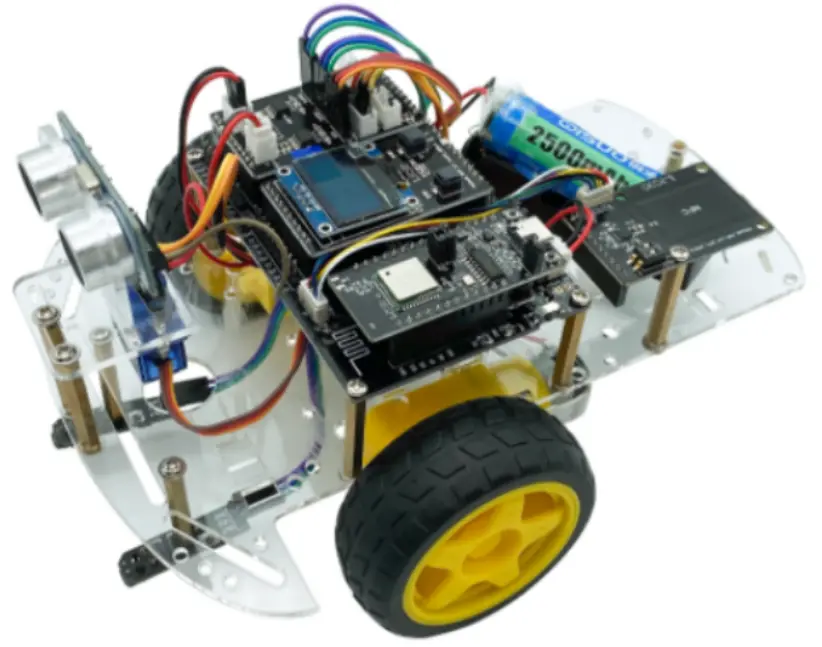
Автомобиль с Wi-Fi на базе системы Hongmeng + Hi3861
Прежде всего, нам нужен автомобильный комплект Wi-Fi, который на самом деле представляет собой Hi3861 плюс двигатель, модуль слежения, ультразвуковой и другие модули.
После установки автомобиля это выглядит примерно так:
13.2 Моторный привод
Сначала мы сделаем только самое простое: запустим двигатель автомобиля, чтобы машина поехала.
Плата драйвера двигателя показана ниже. В текущем чипе драйвера двигателя используется чип L9110S.

Типичная схема приложения показана ниже:
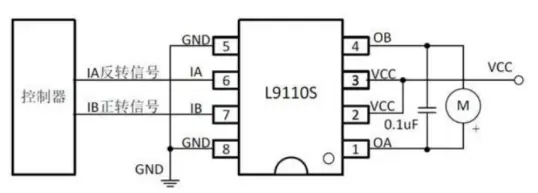
Мы видим, что если мы хотим управлять двигателем, нашему чипу необходимы как минимум два сигнала ШИМ: один для управления прямым вращением и один для управления обратным вращением.
Тогда у нашей машины два колеса и два двигателя, поэтому нам нужно 4 порта ввода-вывода.
Автомобиль Wi-Fi на базе системы Hongmeng + Hi3861 может управляться с помощью компьютера или мобильного телефона.
Следует отметить, что в реальном коде используется не ШИМ, а прямое управление вводом-выводом.
void pwm_init(void)
{
IoTGpioInit(IO_NAME_GPIO_0);
IoTGpioInit(IO_NAME_GPIO_1);
IoTGpioInit(IO_NAME_GPIO_9);
IoTGpioInit(IO_NAME_GPIO_10);
//寮曡剼澶 Di椤
//hi_io_set_func(IO_NAME_GPIO_0, 0);
//hi_io_set_func(IO_NAME_GPIO_1, 0);
//hi_io_set_func(IO_NAME_GPIO_9, 0);
//hi_io_set_func(IO_NAME_GPIO_10, 0);
}
//Гокан
void pwm_stop(void)
{
//鍏韚仠囝WM
gpio_control(GPIO0, IOT_GPIO_VALUE1);
gpio_control(GPIO1, IOT_GPIO_VALUE1);
gpio_control(GPIO9, IOT_GPIO_VALUE1);
gpio_control(GPIO10, IOT_GPIO_VALUE1);
}
void car_stop(void)
{
car_info.cur_status = car_info.go_status;
printf("pwm_stop \r\n");
pwm_stop();
}
// 铓 繘
void pwm_forward(void)
{
//鍏韚仠囝WM
gpio_control(GPIO0, IOT_GPIO_VALUE1);
gpio_control(GPIO1, IOT_GPIO_VALUE0);
gpio_control(GPIO9, IOT_GPIO_VALUE1);
gpio_control(GPIO10, IOT_GPIO_VALUE0);
//Олово婬Вращающийся 稨WM
//револьвер
//IoTPwmStart(PWM_PORT_PWM3, 64000, 64000);
//правое колесо
//IoTPwmStart(PWM_PORT_PWM0, 64000, 64000);
}
void car_forward(void)
{
if(car_info.go_status != CAR_STATUS_FORWARD)
{
//Какой смысл?
return ;
}
if(car_info.cur_status == car_info.go_status)
{
//Чжун Жо €佹 цепочка болезней 夊剉鍖浵纴鐩cum崴玺ㄥнести
return;
}
car_info.cur_status = car_info.go_status;
printf("pwm_forward \r\n");
pwm_forward();
step_count_update();
}
//Олово娨€€
void pwm_backward(void)
{
//鍏韚仠囝WM
gpio_control(GPIO0, IOT_GPIO_VALUE0);
gpio_control(GPIO1, IOT_GPIO_VALUE1);
gpio_control(GPIO9, IOT_GPIO_VALUE0);
gpio_control(GPIO10, IOT_GPIO_VALUE1);
//Олово婬Вращающийся 稨WM
//IoTPwmStart(PWM_PORT_PWM4, 64000, 64000);
//IoTPwmStart(PWM_PORT_PWM1, 64000, 64000);
}
void car_backward(void)
{
if(car_info.go_status != CAR_STATUS_BACKWARD)
{
//Какой смысл?
return ;
}
if(car_info.cur_status == car_info.go_status)
{
//Чжун Жо €佹 цепочка болезней 夊剉鍖浵纴鐩cum崴玺ㄥнести
return;
}
car_info.cur_status = car_info.go_status;
printf("pwm_backward \r\n");
pwm_backward();
step_count_update();
}
//Чен﹁Пульс
void pwm_left(void)
{
//鍏韚仠囝WM
gpio_control(GPIO0, IOT_GPIO_VALUE0);
gpio_control(GPIO1, IOT_GPIO_VALUE0);
gpio_control(GPIO9, IOT_GPIO_VALUE1);
gpio_control(GPIO10, IOT_GPIO_VALUE0);
//Олово婬Вращающийся 稨WM
//IoTPwmStart(PWM_PORT_PWM0, 64000, 64000);
}
void car_left(void)
{
if(car_info.go_status != CAR_STATUS_LEFT)
{
//Какой смысл?
return ;
}
if(car_info.cur_status == car_info.go_status)
{
//Чжун Жо €佹 цепочка болезней 夊剉鍖浵纴鐩cum崴玺ㄥнести
return;
}
car_info.cur_status = car_info.go_status;
printf("pwm_left \r\n");
pwm_left();
step_count_update();
}
//鍙ПЭТ целлюлоза
void pwm_right(void)
{
//鍏韚仠囝WM
gpio_control(GPIO0, IOT_GPIO_VALUE1);
gpio_control(GPIO1, IOT_GPIO_VALUE0);
gpio_control(GPIO9, IOT_GPIO_VALUE0);
gpio_control(GPIO10, IOT_GPIO_VALUE0);
//Олово婬Вращающийся 稨WM
//IoTPwmStart(PWM_PORT_PWM3, 64000, 64000);
}
void car_right(void)
{
if(car_info.go_status != CAR_STATUS_RIGHT)
{
//Какой смысл?
return ;
}
if(car_info.cur_status == car_info.go_status)
{
//Чжун Жо €佹 цепочка болезней 夊剉鍖浵纴鐩cum崴玺ㄥнести
return;
}
car_info.cur_status = car_info.go_status;
printf("pwm_right \r\n");
pwm_right();
step_count_update();
}Наконец, чтобы использовать функцию ШИМ, нам нужно изменить
device/soc/hisilicon/hi3861v100/sdk_liteos/build/config/usr_config.mk
Добавьте эти две строки, чтобы включить функцию ШИМ.
CONFIG_PWM_SUPPORT=y
CONFIG_PWM_HOLD_AFTER_REBOOT=y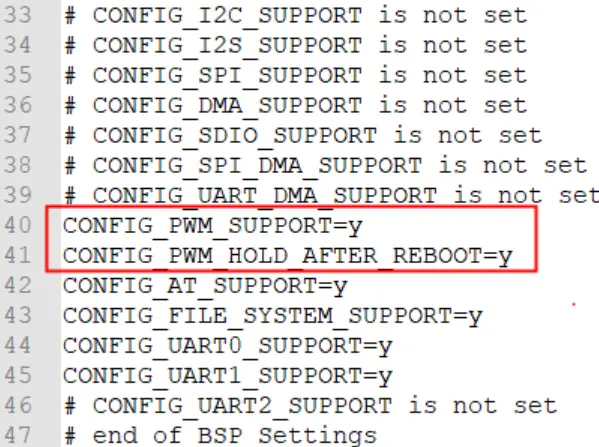
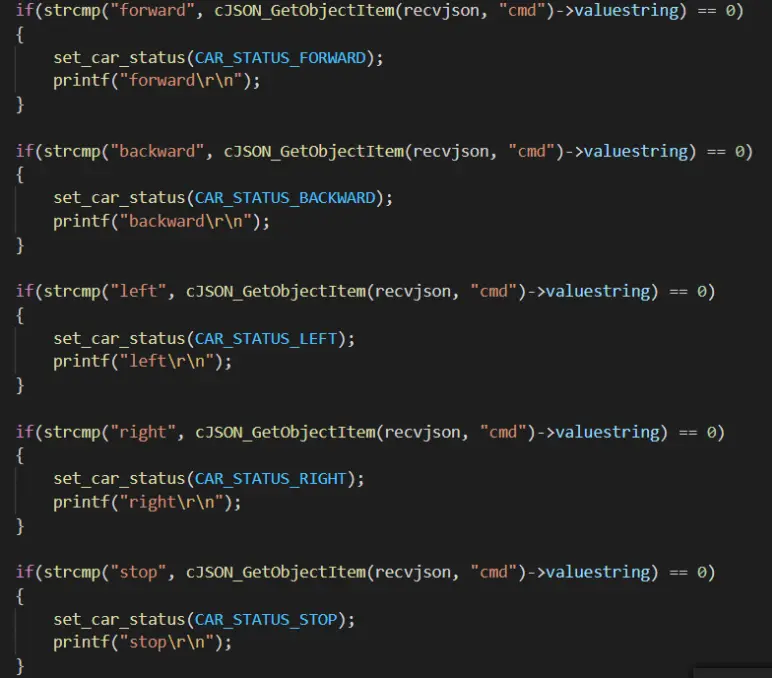
13.3 Часть управления Wi-Fi
Мы просто пишем на машине UDP-программу, которая прослушивает номер порта 50001. Используемый здесь формат связи — json. После того, как автомобиль получает данные UDP, он анализирует json и выполняет соответствующие операции в соответствии с командой, такие как вперед, назад, поворот налево, поворот направо и т. д. Код выглядит следующим образом:
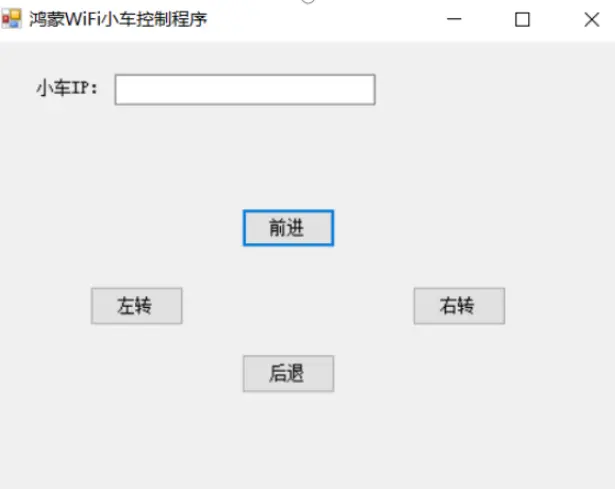
На стороне компьютера используйте C# для написания тестовой программы. Вы можете вручную ввести IP-адрес автомобиля, или вам не нужно вводить IP-адрес. Таким образом, компьютерная программа отправит широковещательный пакет в автомобиль. , который также может иметь функцию управления.
13.4 Подключение к точке доступа Wi-Fi
Обратите внимание, что SSID по умолчанию в автомобильной прошивке WiFi для подключения к точке доступа:

Читателям необходимо изменить его под свои собственные горячие точки.
Файл: sta_entry.c
Исходный код автомобиля и конечный код управления C# имеют открытый исходный код. Вы можете свободно изменять их и использовать свое воображение для создания более мощных и крутых продуктов своими руками.
напиши в конце
Если вы считаете, что этот контент вам очень полезен, я хотел бы предложить вам оказать мне три небольшие услуги:
- Лайки, репосты и ваши «лайки и комментарии» — движущая сила моего творчества;
- сосредоточиться на Редактор,В то же время вы можете рассчитывать на последующие статьи🚀,Делитесь оригинальными знаниями время от времени;
- Если вы хотите получить более полные знания о последних знаниях Хунмэна, вы можете следить за станцией B: Ma Niu Classroom Hongmeng Development;




Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
