Разделение корпуса НПУ на базе RK3588! 6Т действительно силен!
Знакомство с НПУ RK3588
Производительность NPU RK3588 очень мощная,6TOPSРазработан для обеспечения эффективных вычислений вывода нейронной сети.。Это делаетRK3588существоватьРаспознавание изображений, распознавание речи, обработка естественного языкаОн имеет чрезвычайно высокую производительность в областях искусственного интеллекта, таких как。
Кроме того, NPU RK3588 также поддерживает различные среды обучения, включая TensorFlow, PyTorch, Caffe, MXNet и другие среды глубокого обучения, популярные в разработке искусственного интеллекта, которые могут предоставить разработчикам множество инструментов и библиотек, чтобы они могли легко Моделирование выполнения и вывод позволяют легко обрабатывать различные сценарии вычислений с большими данными.
RK3588 NPU, типичное промышленное применение

Идентификация и отслеживание цели:существовать Видеонаблюдение и беспилотные поля,RK3588 может обеспечить высокопроизводительную вычислительную мощность NPU 6TOPS.,Обрабатывает потоковое видео высокой четкости, обнаружение, распознавание и отслеживание объектов в режиме реального времени. Его мощные вычислительные возможности могут удовлетворить потребности обработки в реальном времени в сложных сценариях.,Повысьте точность и скорость реагирования систем мониторинга.
АГВ-робот:RK3588изNPUМожет обеспечить мощныйизспособность визуальной обработки,Может помочь роботам AGV эффективно планировать путь и избегать препятствий.,Повышение эффективности и безопасности перевозок.
Медицинский эндоскоп:RK3588изNPUДоступныйкартина Как признание и анализизспособность,Помогите врачам быстро и точно диагностировать заболевания. Его возможности глубокого обучения могут помочь врачам в распознавании изображений и обнаружении поражений.,Повышение точности и эффективности диагностики.
Высокоскоростной платный терминал:RK3588изNPUДоступный车牌识别和计费из处理способность,Реализация беспилотного взимания платы за проезд на автомагистралях,Повышение эффективности и безопасности перевозок.
Система кругового обзора автомобиля:RK3588изNPUМожет обрабатывать приобретение нескольких камеризкартинакак данные,Реализуйте 360-градусный мониторинг окружающей среды автомобиля.,Помогите транспортным средствам выполнять обнаружение препятствий, предупреждение о столкновении, автоматическую парковку и другие функции.
Процесс разработки НПУ RK3588
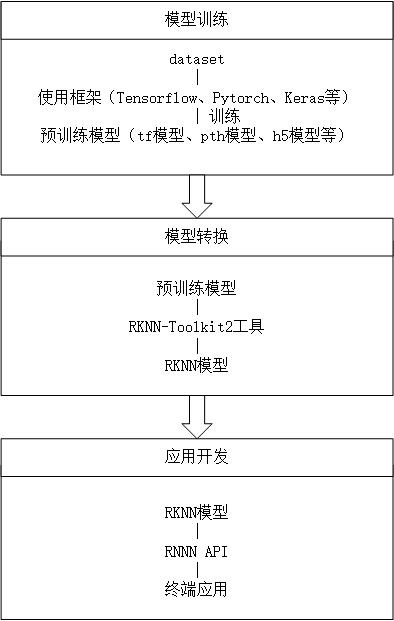
Шаг первый: обучение модели
Во-первых, вам необходимо собрать и подготовить данные для обучения, выбрать подходящую среду глубокого обучения (например, TensorFlow, PyTorch, Keras и т. д.) для обучения модели или использовать официально предоставленную модель.
Шаг 2: Преобразование модели
После завершения обучения модели используйте RKNN-Toolkit2, чтобы преобразовать предварительно обученную модель в модель RKNN, которую может использовать NPU RK3588. Обычно это включает в себя соответствующее изменение и оптимизацию вычислительного графа в модели для адаптации к аппаратной архитектуре и набору команд NPU.
Шаг третий: Разработка приложения
Разрабатывать приложения на базе API РКНН. Этап разработки включает в себя интеграцию преобразованной модели в приложение на основе конкретных требований.
Обмен опытом разработки NPU RK3588
Описание случая
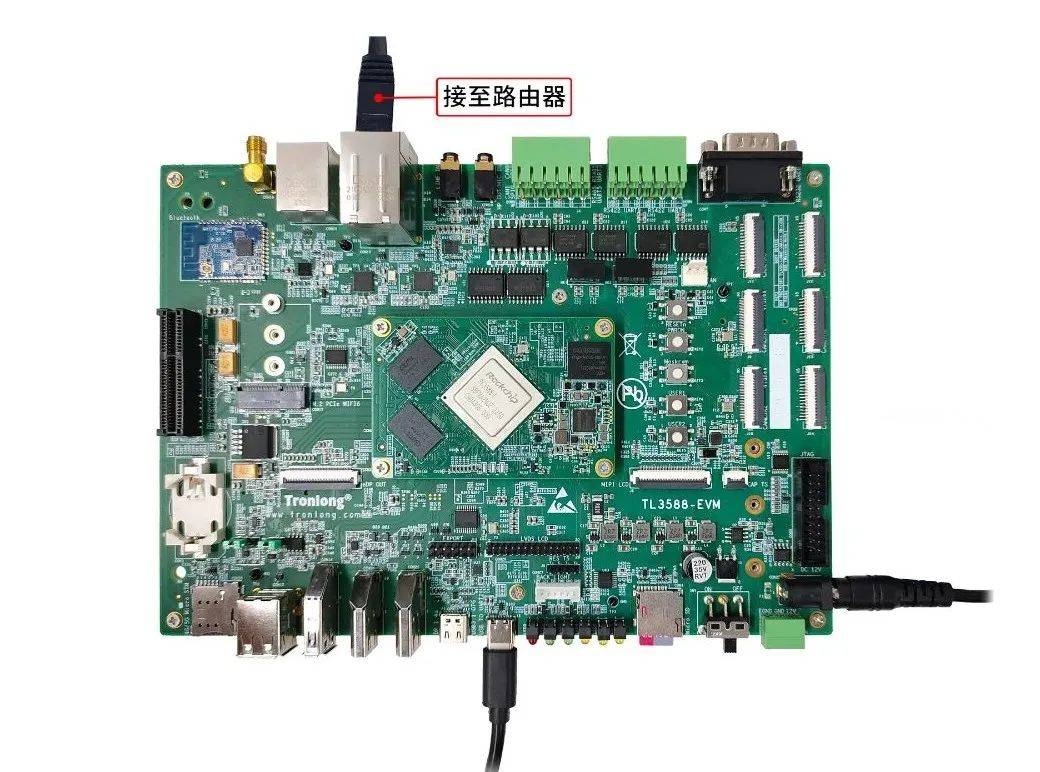
В этом случае API РКНН используется для реализации распознавания целевых объектов на изображениях, добавляет результаты распознавания к изображению в виде водяного знака и сохраняет его как файл изображения. Тест случайного цикла выполняется 10 раз и рассчитывается среднее время обработки вывода. Тест проводился на базе промышленной оценочной платы Chuanglong Technology RK3588 TL3588-EVM.
Примечание. Этот случай основан на официальной реализации программы Rockchip. Каталог был реконструирован, а компиляция упрощена. Функциональная логика не была изменена. Официальные процедуры расположены в каталоге исходного кода LinuxSDK «external/rknpu2/examples/rknn_yolov5_demo/».

Схема обработки программы выглядит следующим образом:

кейс-тест
Подключите порт Gigabit Ethernet ETH0 оценочной платы к маршрутизатору через сетевой кабель.
Скопируйте все файлы из каталога bin в любой каталог файловой системы оценочной платы.

В каталоге, где находится исполняемый файл, выполните следующую команду, чтобы выполнить вывод модели для целевого объекта изображения.
Примечание. Во время работы модели будет наблюдаться дрожание.
Target#./yolov5_object_detect yolov5s-640-640_rm_transpose_rk3588.rknn bus.jpg
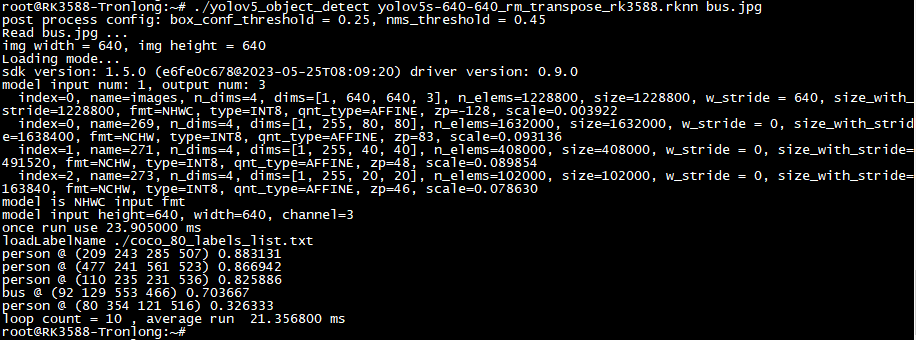
Из выходной информации мы видим, что эта программа распознала, что тестовое изображение содержит 4 человека и 1 объект-автобус. Для однократного запуска модели потребовалось 23,905000 мс; среднее время, необходимое для запуска модели 10 раз в цикле, составило. 21,356800 мс.
После того, как программа случая успешно отметит целевой объект тестового изображения, она выведет отмеченное изображение с именем out.jpg в текущий каталог. Скопируйте файл out.jpg в Windows и используйте соответствующее программное обеспечение на стороне ПК для сравнения шин. jpg и out. jpg, результаты теста показаны ниже.


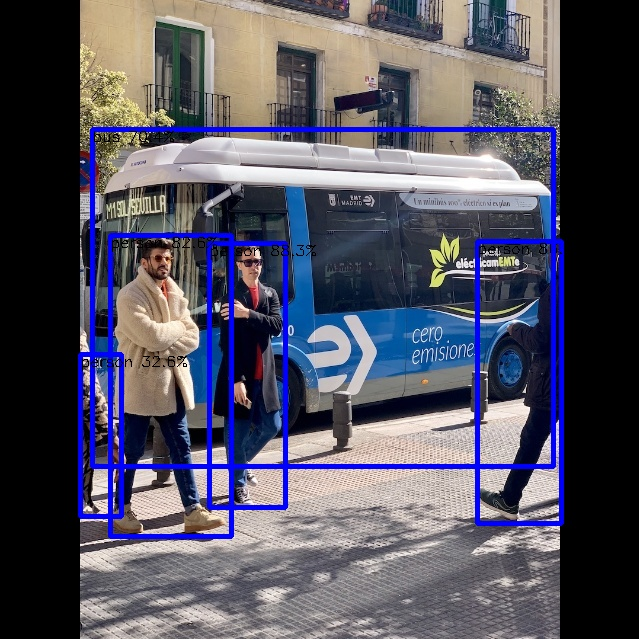
На изображении out.jpg видно, что программа дела может правильно выбрать 4 человека и 1 автомобиль. Она также отображает текстовые метки людей и автобусов, а также уровни достоверности. Количество и информация помеченных объектов соответствуют информации, напечатанной программой. программа.
Описание типа целевого набора данных, идентификацию которого может поддерживать эта программа, находится в файле coco_80_labels_list.txt в каталоге bin. Пользователи могут проводить тестирование и проверку на основе соответствующих целевых типов.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
