Рассуждения в реальном времени + точность SOTA! RTMO выводит оценку позы MMPose на новую высоту
Высокоточный одноэтапный алгоритм оценки позы человека в режиме реального времени RTMO официально открыт с открытым исходным кодом! RTMO сочетает в себе стратегию координатной регрессии и систему обнаружения YOLOX, чтобы преодолеть трудности достижения точности и скорости в существующей одноэтапной модели оценки позы человека. RTMO имеет два выдающихся преимущества:
- интенсивно существуют на многопользовательской сцене,Лидирует как по скорости, так и по точности. По сравнению с традиционной двухэтапной моделью, такой как RTMPose,RTMO На скорость незначительно влияет количество людей на экране. В то же время он достиг высочайшей точности в сценах с участием нескольких человек, таких как «Существующее». CrowdPose данныеустановить наполучать83.8 AP, улучшенная по сравнению с предыдущей лучшей моделью 5.3 AP。
- Модель Просто и легко развернуть. Комплексная сборка из одноступенчатой модели RTMO. может завершить рассуждение одной командой иразвернуть,Дополнительная сеть обнаружения людей не требуется.,Процесс использованияпользования значительно упрощается.
Домашняя страница проекта:
https://github.com/open-mmlab/mmpose/tree/main/projects/rtmo
(Нажмите в конце статьи, чтобы прочитать исходный текст и перейти непосредственно)
Бумажная ссылка:
https://arxiv.org/abs/2312.07526
Отображение эффектов
Давайте сначала посмотрим на эффект обнаружения RTMO в многопользовательской сцене (задержка — результат теста NVIDIA 3090 TensorRT-FP16)
Рис. 1. Диаграмма эффекта вывода 1.

Рисунок 2 Эффект вывода Рисунок 2
Сравнение производительности моделей оценки позы в реальном времени
Существующие модели оценки позы в реальном времени в основном включают облегченные модели с двухэтапной нисходящей архитектурой (например, RTMPose) и одноэтапные модели, основанные на архитектуре YOLO (например, YOLO-Pose, YOLOv8-Pose). Мы сравнили их скорость и точность на процессоре и графическом процессоре соответственно.
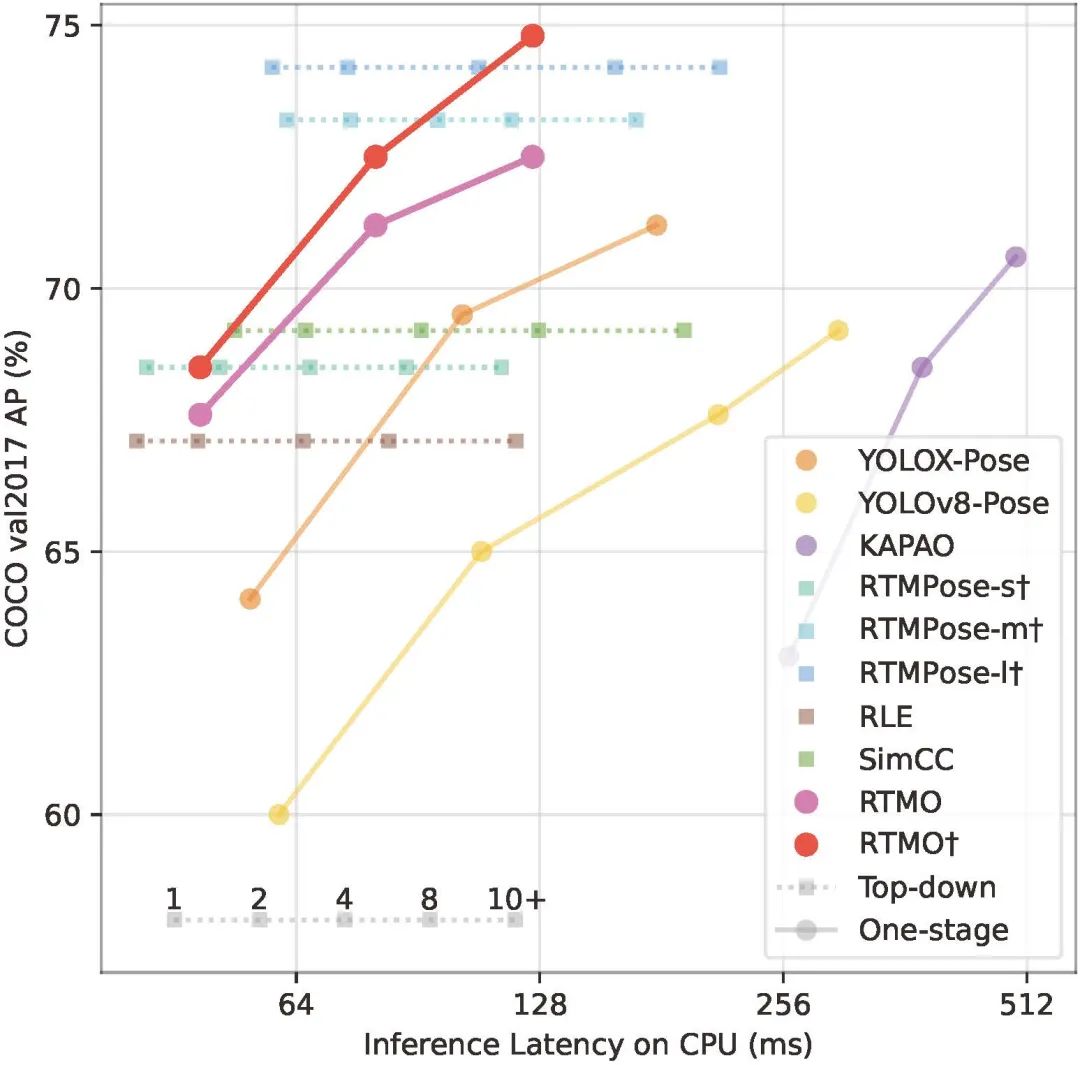
Рисунок 3. Сравнительная таблица скорости и точности модели оценки ориентации в реальном времени на ЦП.
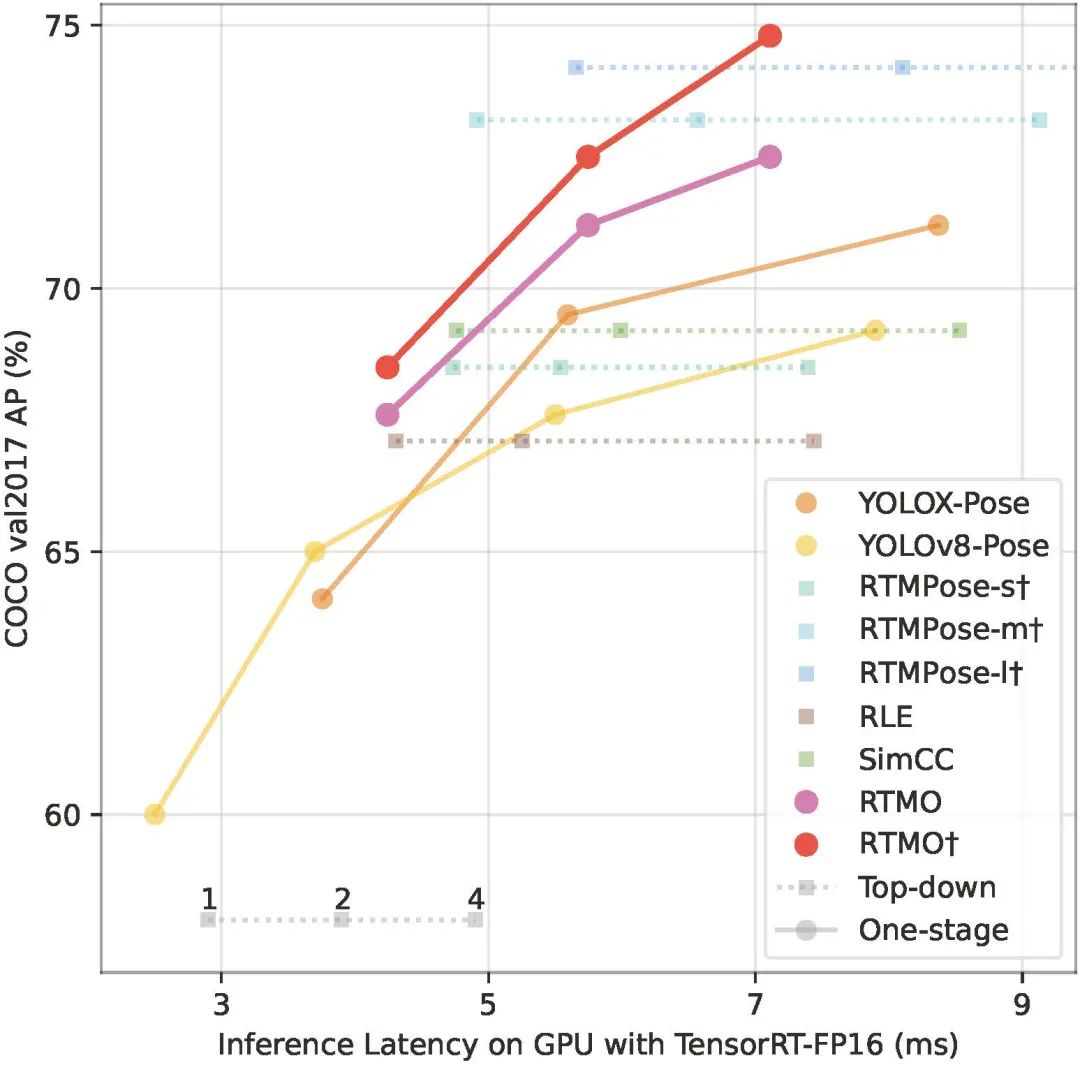
Рисунок 4. Сравнительная таблица скорости и точности модели оценки ориентации в реальном времени на графическом процессоре.
По сравнению с другими одноступенчатыми моделями реального времени RTMO лидирует по производительности и обеспечивает почти такую же точность, как двухступенчатая модель RTMPose. По сравнению с двухэтапной моделью RTMO имеет преимущество в скорости, когда на экране много людей. При тех же требованиях к точности, когда количество людей на экране превышает 4 (ЦП)/2 (ГП), скорость вывода RTMO превосходит RTMPose.
Высочайшая производительность в многопользовательских сценариях
Многолюдные сцены с участием нескольких людей всегда были сложной проблемой в области оценки поз. RTMO использует улучшение данных MixUp во время процесса обучения для моделирования многолюдных сцен; точность оценки отношения учитывается в процессе распределения положительных и отрицательных образцов, уменьшая ошибки, вызванные несовпадением ключевых точек в сочетании с обучением с использованием нескольких наборов данных MMPose; Таким образом, RTMO по-прежнему имеет высокую точность в сценах с большим количеством людей. RTMO достигла на данный момент высочайшей точности в наборах данных CrowdPose и OCHuman для этого типа сценария.
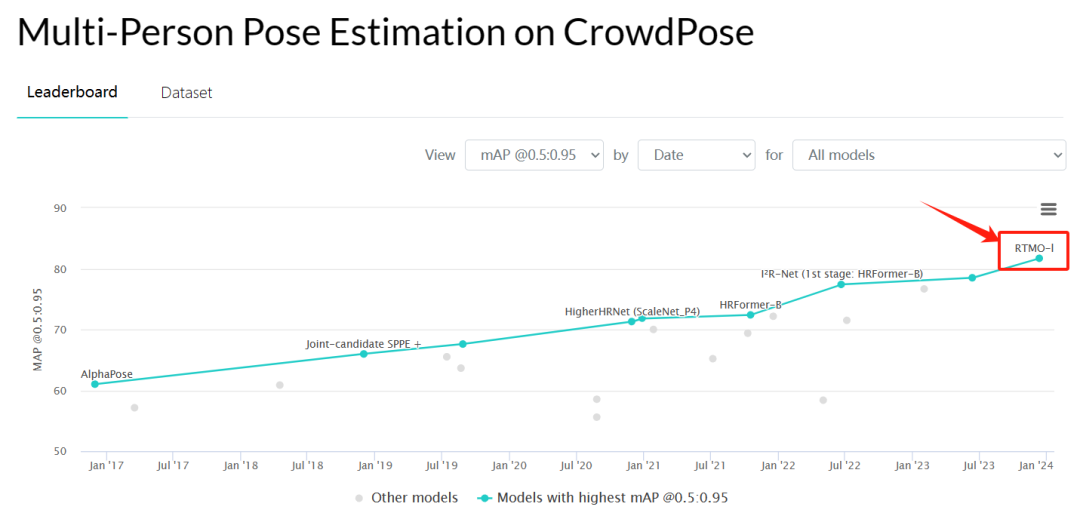
Рис. 5. Точность модели SOTA на тестовом наборе CrowdPose
На CrowdPose RTMO-l достиг 83,8 AP, что на 5,3 AP лучше, чем у предыдущей лучшей модели. Кто бы мог подумать, что это будет легкая модель, способная работать со скоростью более 100 кадров в секунду?
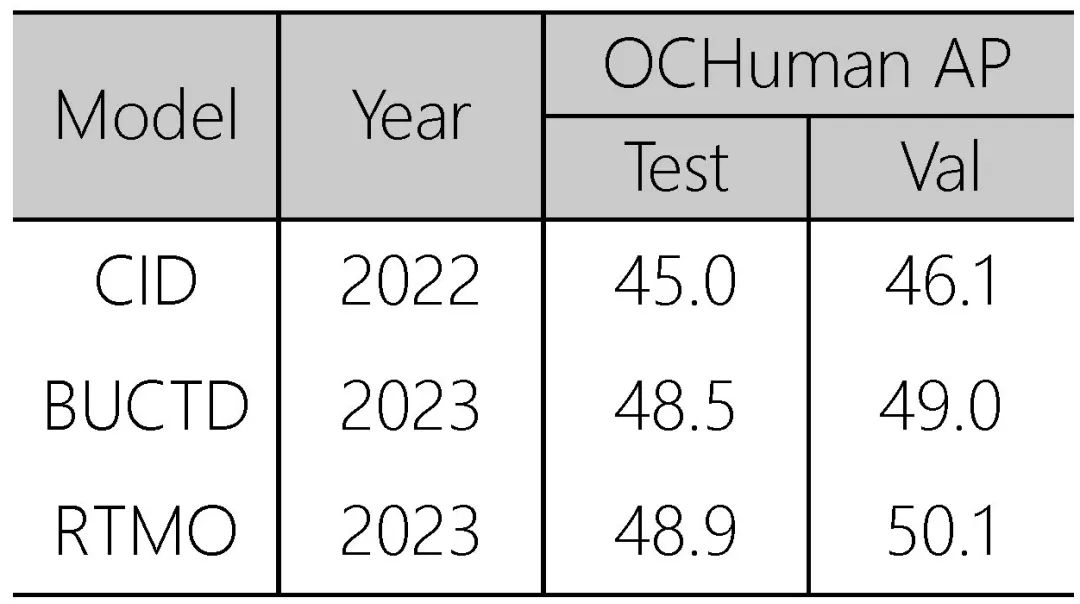
Рисунок 6. Точность модели SOTA набора данных OCHuman.
На OCHuman RTMO также достиг самой высокой точности на данный момент (без использования аннотированных блоков обнаружения).
Удобный интерфейс рассуждений
Воспользуйтесь MMPose рамка Удобный интерфейс рассуждений, всего одной строкой кода мы можем настроить использование RTMO модель для вывода.

Рис. 7. Одна строка кода использует RTMO для оценки позы нескольких человек.
На платформе приложений OpenXLab приложения RTMPose также интегрировали RTMO. Вы можете использовать RTMO для обработки изображений и видео онлайн в своем браузере без локальной установки.
Ссылка на приложение RTMPose:
https://openxlab.org.cn/apps/detail/mmpose/RTMPose
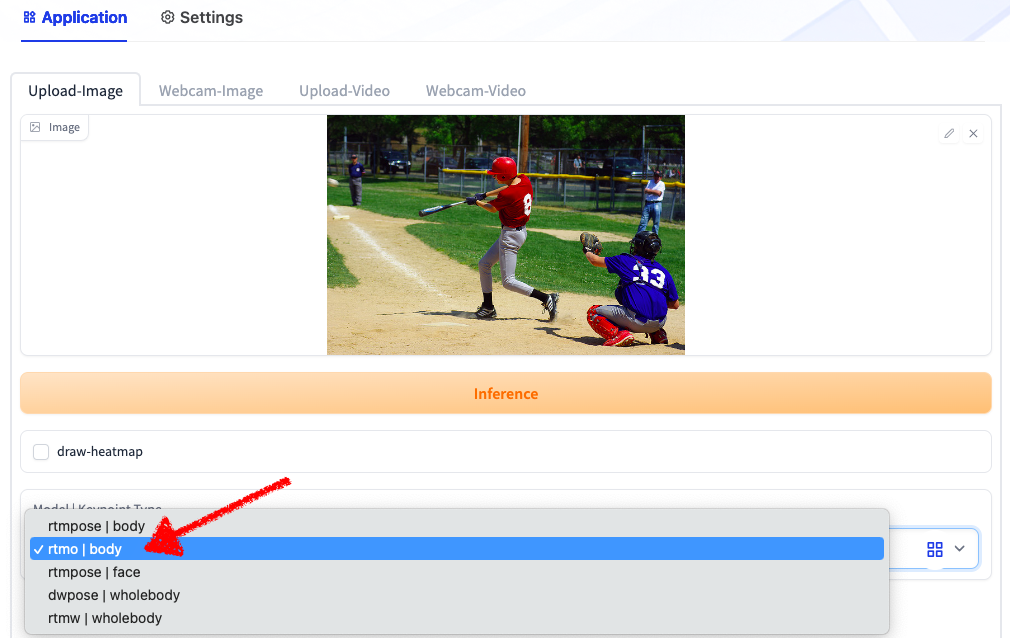
Рисунок 8. Онлайн-пробная версия RTMO
Поддержка многоплатформенного развертывания
Для небольших партнеров, которым необходимо развернуть модели на стороне бизнеса, RTMO также приносит хорошие новости.
В отличие от двухэтапной модели оценки позы, RTMO не требует использования детектора человека для предварительного получения кадров обнаружения человека, поэтому его развертывание проще, чем RTMPose. На домашней странице проекта RTMO рассказывается, как использовать MMDeploy для развертывания моделей RTMO, независимо от того, используется ли серверная часть ONNX или TensorRT, это можно сделать одним щелчком мыши.
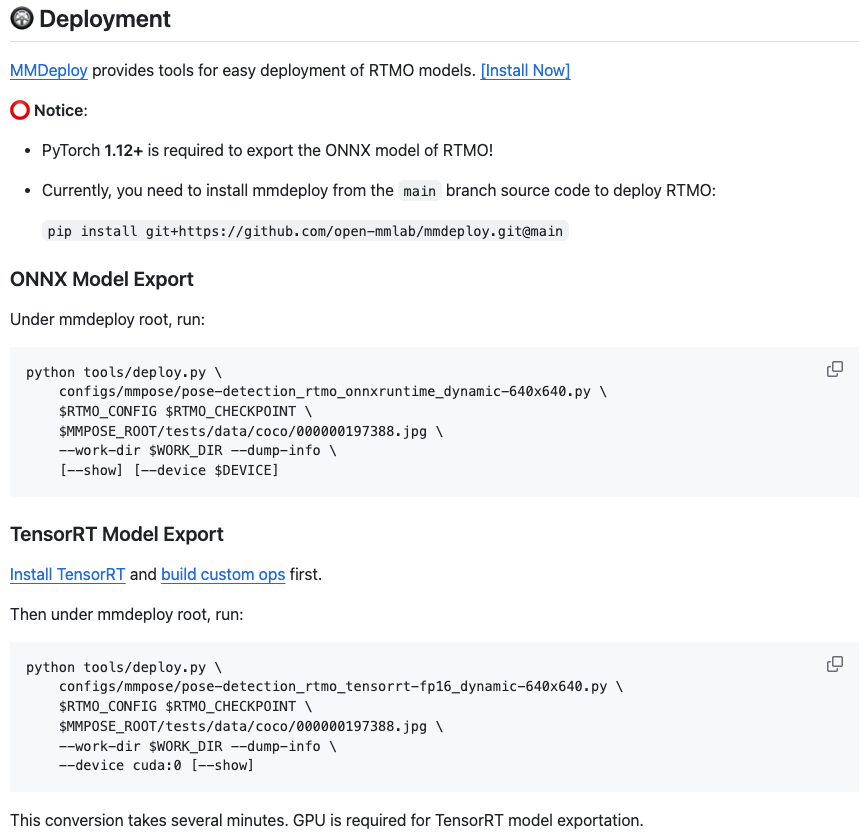
Рисунок 9. Учебное пособие по развертыванию RTMO.
Кроме того, мы также предоставляем облегченную библиотеку вывода rtmlib (https://github.com/Tau-J/rtmlib), которую можно использовать «из коробки»:
- Нет необходимости устанавливать ряд обучающих библиотек, таких как mmcv, mmengine, mmpose и т. д., вы можете сделать выводы с помощью opencv
- Супер дружелюбный и лаконичный интерфейс вывода и визуализации
- Автоматическая загрузка и кэширование onnx Модель
- поддерживать RTMPose Полный спектр официальных и производных моделей: RTMPose, DWPose, RTMO, RTMW. etc.
Пример кода:
import cv2
from rtmlib import Body, draw_skeleton
device = 'cpu' # cpu, cuda
backend = 'onnxruntime' # opencv, onnxruntime, openvino
img = cv2.imread('./demo.jpg')
openpose_skeleton = False # True for openpose-style, False for mmpose-style
body = Body(
pose='rtmo',
to_openpose=openpose_skeleton,
mode='balanced', # balanced, performance, lightweight
backend=backend,
device=device)
keypoints, scores = body(img)
# visualize
# if you want to use black background instead of original image,
# img_show = np.zeros(img_show.shape, dtype=np.uint8)
img_show = draw_skeleton(img_show, keypoints, scores, kpt_thr=0.5)
cv2.imshow('img', img_show)
cv2.waitKey()One More Thing
Модель оценки позы всего тела RTMW семейства RTMPose также была полностью обновлена и улучшена на основе схемы дистилляции DWPose (также интегрированной в MMPose). По сравнению с RTMW-x в альфа-версии она достигла точности 70,2 м А. Дистиллированный RTMW-1 достиг 70,1 м АР при 60% вычислительных затратах.

Рис. 10. Анимация сравнения эффектов DWPose (вверху) и RTMW (внизу).
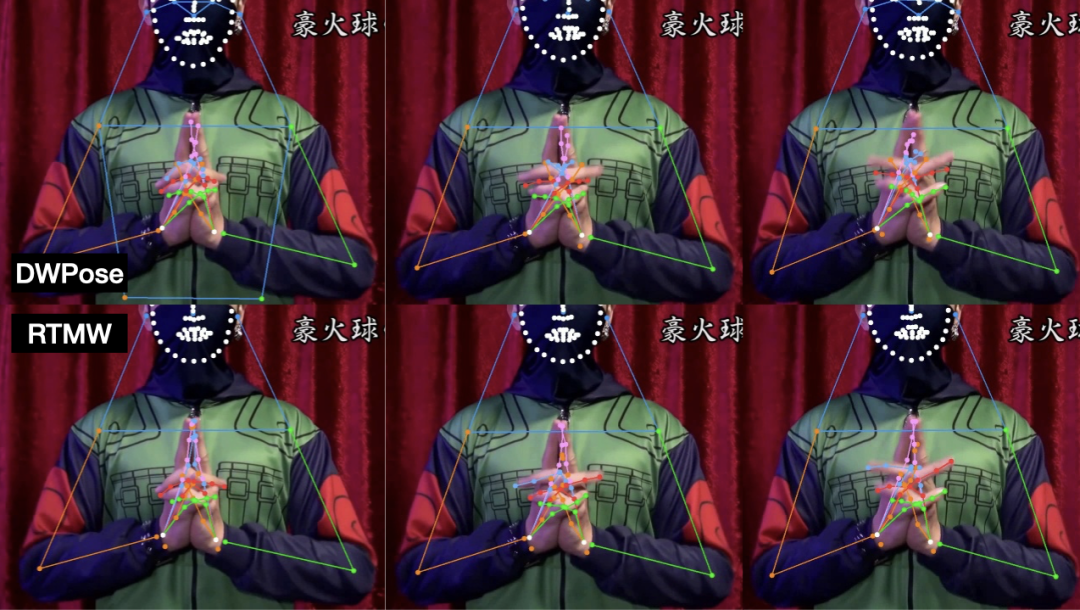
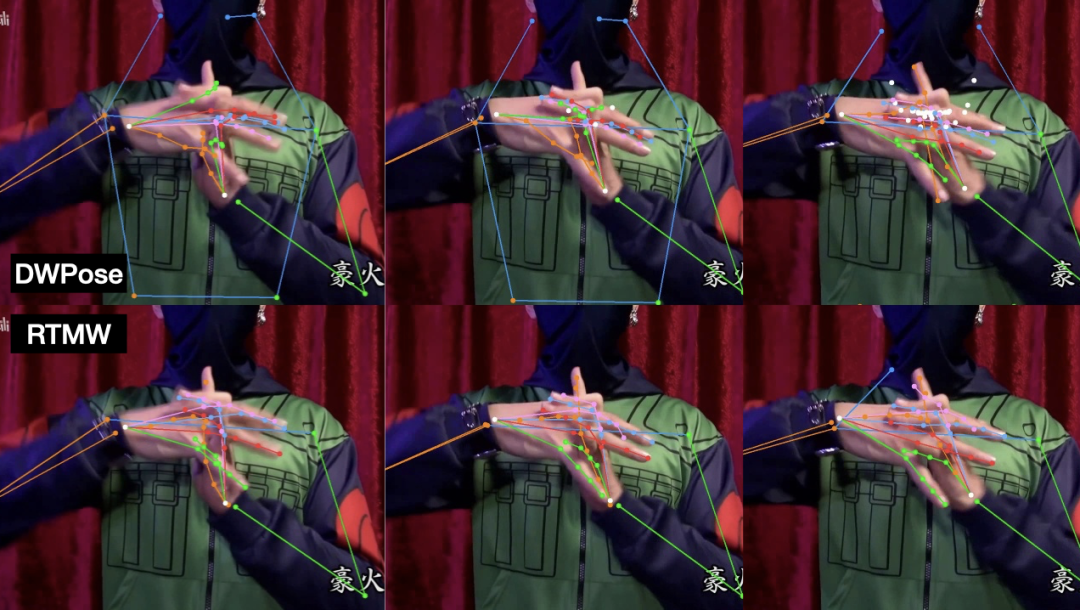
Рис. 11. Неподвижное изображение, сравнивающее эффекты DWPose (вверху) и RTMW (внизу).
Подвести итог
RTMO — это одноэтапная модель оценки позы человека в реальном времени, основанная на MMPose. Она сочетает в себе координатную регрессию и систему обнаружения YOLOX для достижения максимальной скорости и точности в сценариях с участием нескольких человек. RTMO впервые достигла 80+ AP в наборе данных CrowdPose и на данный момент является лучшей моделью реального времени для многолюдных сцен с участием нескольких человек. В качестве одноэтапной модели развертывание вывода RTMO является простым и удобным. Мы также предоставляем интерфейсы вывода Python и решения для многоплатформенного развертывания, чтобы разработчики могли быстро приступить к работе. Мы искренне приветствуем друзей, которые интересуются оценкой позы человеческого тела, попробовать RTMO и высказать ценное мнение!
Домашняя страница проекта:
https://github.com/open-mmlab/mmpose/tree/main/projects/rtmo



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
