Проектирование системы мониторинга и управления задачами AGV
Введение
источник:<<Автоматизация производства>>
Система управления, мониторинга и диспетчеризации AGV может отслеживать состояние AGV в режиме реального времени, а также выдавать и получать информацию о задачах. Это одна из важных основных технологий системы AGV.
В большинстве существующих систем управления и мониторинга AGV используются настольные программные системы, которые требуют от пользователей установки соответствующего программного обеспечения, прежде чем их можно будет использовать. Существуют такие проблемы, как отсутствие совместного использования ресурсов, трудности в обслуживании и неудобное использование. Разработана система программного обеспечения для мониторинга состояния и управления задачами AGV в режиме реального времени.
Основной функцией системы является мониторинг состояния транспортного средства в режиме реального времени и управление задачами. Пользователи могут получать информацию о транспортном средстве, контролировать его рабочее состояние, выдавать соответствующие задания, просматривать соответствующую историческую информацию и т. д. через веб-терминал. достижение взаимодействия человека и компьютера, соответствие характеристикам эффективной и удобной работы в сложных производственных средах и предоставление интеллектуальной, информационной и удобной платформы управления для корпоративного производства.
В этой статье будут представлены идеи проектирования и методы реализации системы с трех аспектов: анализ спроса, бизнес-процесс и техническая структура, а также реализация функциональных модулей.
1. Анализ системных требований
Чтобы отразить стандартизацию и научность проектирования программных систем, анализ системных требований разделен на функциональные требования и нефункциональные требования.
1.1 Функциональные требования
1.1.1 Мониторинг состояния AGV в режиме реального времени
Пользователь входит в систему на веб-странице через браузер и входит в основной интерфейс управления системой. Главный интерфейс управления имеет функцию обзора рабочего состояния кластера AGV. Рабочее состояние каждого AGV может отображаться в реальном времени. время на веб-странице, и им можно управлять с помощью кнопок на странице. Осуществлять ручное управление движением AGV.
1.1.2 Управление задачами AGV
Пользователи назначают задачи кластеру AGV через интерфейс управления задачами на веб-странице. Система может автоматически планировать задачи и отслеживать статус выполнения задач в режиме реального времени.
1.1.3 Планирование пути
После получения конкретных задач, назначенных пользователем, система может автоматически спланировать оптимальный путь от целевой начальной точки до целевой конечной точки.
1.2 Нефункциональные требования
1.2.1 Доступность
Учитывая, что разные пользователи имеют разные возможности работы на программной платформе, системе необходимо контролировать необходимые элементы, чтобы пользователи могли обеспечить полный ввод соответствующей информации. В то же время она предоставляет унифицированные и стандартизированные подсказки для необходимых элементов, обеспечивает унифицированный и унифицированный ввод. стандартизированные рабочие подсказки и снижение затрат пользователей. Сложность использования и достаточная оперативная информация, которая помогает пользователям эффективно и правильно выполнять задачи, рассматривать проблемы с точки зрения пользователя, обеспечивать рациональность технологических операций и облегчать пользователям их использование. система.
1.2.2 Высокая производительность
Планируйте количество транспортных средств, пользователей, администраторов и сайтов, а также анализируйте одновременных онлайн-пользователей и время ответа веб-стороны, чтобы гарантировать, что система может быть применена к определенному размеру групп приложений и эффективно работать, а также гарантировать, что правильные данные могут быть передаваться между программным обеспечением Exchange и общим ресурсом.
Система должна обладать высокой отказоустойчивостью и устойчивостью к помехам, а также обеспечивать эффективную работу при исправном оборудовании и системе связи.
1.2.3 Безопасность
Эта система должна шифровать пароли пользователей по определенному алгоритму, обеспечивать механизм автоматического резервного копирования базы данных, позволять пользователям выполнять резервное копирование и восстановление данных вручную для восполнения повреждения и потери данных, а также может фиксировать все ошибки, возникающие при работе системы. Ведение журнала ошибок позволяет легко найти причину ошибок.
Важные операции пользователя записываются в соответствующие журналы для просмотра, а также записывается ключевая информация об операциях пользователя.
2. Бизнес-процесс и техническая архитектура системы.
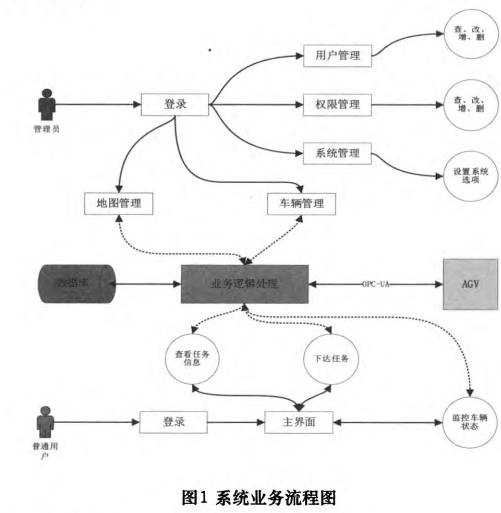
2.1 Общий бизнес-процесс системы
Эта система в основном состоит из двух частей: бизнес администратора и бизнес обычного пользователя. После того, как обычные пользователи входят в систему на веб-странице через браузер, они входят в основной интерфейс управления и могут просматривать статус и информацию о задачах в режиме реального времени. каждый АГВ через основной интерфейс управления и может выдавать задания, чтобы АГВ, получивший задания, мог выполнить соответствующие задачи.
Помимо выполнения обычных пользовательских услуг, администраторы также могут управлять основными данными, связанными с системой, включая просмотр, изменение, добавление и удаление пользователей, предоставление различных разрешений различным пользователям, настройку параметров, связанных с системой, а также могут изменять карту и транспортное средство. управление. Как показано на рисунке 1.
2.2 Структурная схема системы
Эта система использует структуру B/S, то есть структуру браузер/сервер (браузер/сервер). Вся система состоит из 4 частей: веб-клиент, сервер приложений, подсистема связи, службы планирования задач и маршрутов. Как показано на рисунке 2.
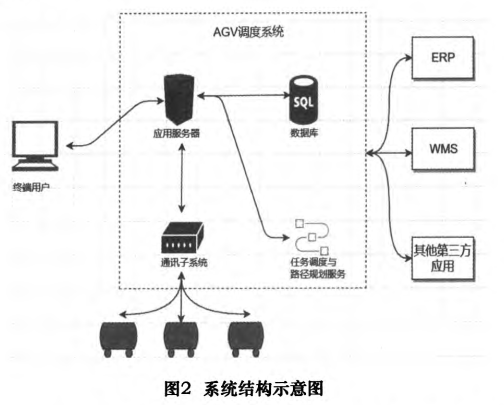
1) Веб-клиент — это веб-приложение, работающее на ПК. Для него требуется установленный браузер. Через браузер вы можете использовать различные функции, предоставляемые сервером. Пользователи могут проверять статус работы AGV в веб-клиенте. выдавать текущие задачи и т.д. .
2) Сервер приложений реализует хранилище данных и бизнес-логику, соответствующую веб-клиенту. Внедрите бизнес-логику, такую как мониторинг состояния AGV, запрос статуса AGV, управление задачами, редактирование карт, управление пользователями и управление системой.
3) Подсистема связи в основном реализует двустороннюю связь с AGV. Архитектура подсистемы связи основана на протоколе 0PC-UA. Она реализует прием информации о состоянии AGV в реальном времени и отправку управляющей информации в AGV.
4) Планирование задач отвечает за прием задач, выданных веб-клиентом, и координацию AGV в системе для выполнения данных задач с помощью алгоритма планирования задач. Планирование пути вычисляет лучший путь от исходного местоположения до конечного местоположения для конкретной задачи.
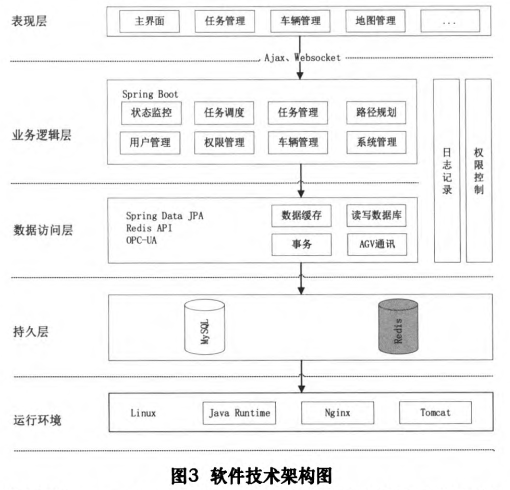
2.3 Архитектура программных технологий
Чтобы реализовать идею «высокой связанности и низкой связанности», структура системы в основном разделена на пять уровней снизу вверх в зависимости от функции: рабочая среда, уровень персистентности, уровень доступа к данным, уровень бизнес-логики и уровень представления. .
Как показано на рисунке 3.
Операционная среда: в основном включает в себя программную и аппаратную инфраструктуру.
Уровень сохранения: в основном база данных, используемая для хранения системных данных.
Уровень доступа к данным. Основная функция — предоставить единый интерфейс для доступа к базе данных.
Уровень бизнес-логики: в основном отвечает за обработку бизнес-областей системы и отображение результатов на уровне представления. Уровень бизнес-логики расположен между уровнем данных и уровнем представления и играет связующую роль при обмене данными.
Уровень представления: основная функция — отображение интерфейса, получение и передача пользовательских данных, а также предоставление пользователям интерактивного интерфейса с фоном.
Серверная часть системы мониторинга и управления AGV разработана с использованием языка JAVA. Серверная часть системы использует Spring Boot в качестве среды разработки. Уровень доступа к данным использует Sprmg Daqi JPA. База данных использует основную реляционную базу данных с открытым исходным кодом MySQL.
Веб-интерфейс системы мониторинга и управления AGV разработан с использованием языка Typescript и платформы React и поддерживает длительное соединение с браузером через Websocket, позволяя пользователям отслеживать изменения статуса AGV в режиме реального времени. Система мониторинга и управления AGV взаимодействует с автомобилями AGV посредством стандартной промышленной связи OPC-UA.
Используется Sprmg Daqi JPA, а в базе данных используется основная реляционная база данных с открытым исходным кодом MySQL. Веб-интерфейс системы мониторинга и управления AGV разработан с использованием языка Typescript и платформы React и поддерживает длительное соединение с браузером через Websocket, позволяя пользователям отслеживать изменения статуса AGV в режиме реального времени.
Система мониторинга и управления AGV обменивается данными с автомобилями AGV по стандартному промышленному протоколу связи OPC-UA.
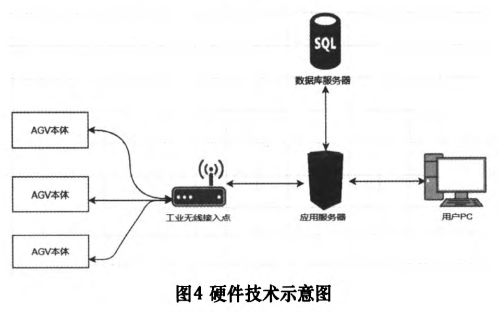
2.4 Архитектура аппаратных технологий
Аппаратное оборудование, задействованное в этой системе, включает в себя: корпус AGV (включая механическую конструкцию, электрическое оборудование и промышленные компьютеры, управляемые корпусом AGV), оборудование промышленной локальной сети, серверы приложений, используемые для выпуска программной системы, серверы баз данных, ответственные за хранение данных, и конечных пользователей. для полного управления и мониторинга компьютеров.
Вот как это работает:
Сначала корпус AGV отправляет сенсорную информацию, собранную оборудованием для сбора информации, на удаленный сервер приложений, обращаясь к промышленной беспроводной точке доступа. Затем сервер приложений успешно обрабатывает данные и сохраняет их в базе данных. Наконец, пользователь осуществляет обработку. через клиент ПК. Удаленный мониторинг информации о состоянии AGV в реальном времени. Техническая схема оборудования представлена на рисунке 4.
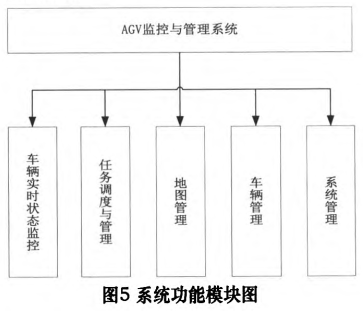
3. Проектирование и реализация функционального модуля
На основе анализа требований к системе и бизнес-процессов с целью стандартизации бизнес-процессов, совместного использования информационных ресурсов, повышения эффективности работы и снижения трудозатрат вся система планируется как мониторинг состояния транспортных средств в реальном времени, управление картами, управление транспортными средствами, выполнение задач. планирование и управление, а также управление системой. Пять основных функциональных модулей, схема функциональных модулей системы показана на рисунке 5.
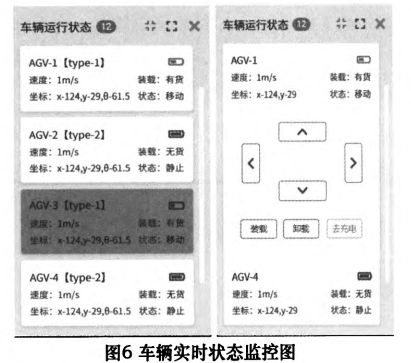
3.1 Мониторинг состояния автомобиля в режиме реального времени
Система может отслеживать состояние транспортных средств, с которыми она взаимодействует, в режиме реального времени. Основные элементы статуса включают в себя: номер AGV, тип AGV, текущее местоположение AGV, статус работы, статус загрузки, скорость движения, направление движения, состояние связи, заряд аккумулятора. и структурный статус.
Скорость и направление движения автомобиля также можно контролировать вручную. Как показано на рисунке 6.
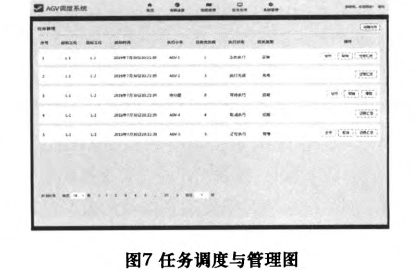
3.2 Планирование и управление задачами
Пользователи могут добавлять в систему конкретные задачи: рабочие задачи, задачи остановки, задачи зарядки. Подробности задачи включают в себя: стартовую станцию, целевую станцию, время начала, приоритет задачи и т. д. Когда задача высвобождается, система автоматически выполняет планирование пути, транспортное средство. распределение и планирование задач.
Вы также можете запрашивать, изменять, отменять, суммировать статус задач и т. д. Запрос задачи может запрашивать следующее содержимое: идентификатор задачи, тип задачи, сведения о задаче, приоритет задачи, время запуска задачи, статус выполнения задачи и т. д. Как показано на рисунке 7.
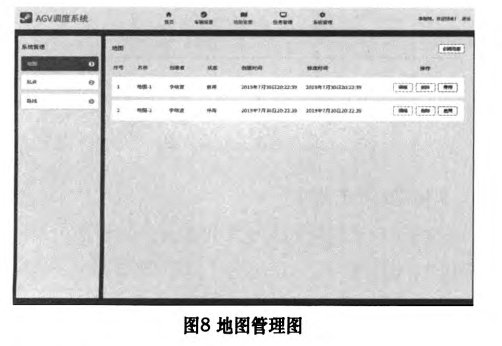
3.3 Управление картой
Пользователи могут редактировать карту в системе графически. Основными компонентами карты являются: объекты, маршруты и территории. Создавайте, редактируйте, удаляйте и активируйте карты, объекты и маршруты, чтобы убедиться, что автомобиль подходит для сложных рабочих условий.
Как показано на рисунке 8.
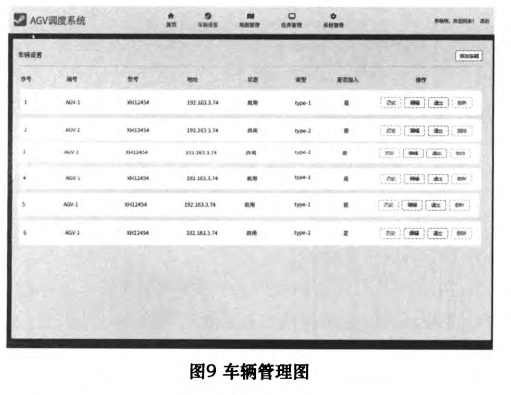
3.4 Управление транспортным средством
Пользователи могут запрашивать информацию об автомобиле в системе. В основном включают в себя: запрос истории пробега, запрос текущего времени пробега. Вы также можете добавлять, удалять транспортные средства и устанавливать функции транспортных средств в системе, чтобы позволить транспортным средствам выполнять соответствующие задачи.
Как показано на рисунке 9.
3.5 Управление системой
Управление системой в основном включает в себя четыре подмодуля: управление пользователями, управление связью, настройку разрешений и управление журналами. Функция модуля управления пользователями в основном заключается в том, чтобы позволить системе поддерживать администраторов в установке и изменении их основной личной информации и паролей для входа.
Пользователь-суперадминистратор (есть только один) также поддерживает операции запроса, добавления, удаления и изменения других пользователей-администраторов для реализации полного режима RBAC (Role-BasedAcceSS Contr01). Основная функция модуля управления связью заключается в том, чтобы пользователь мог выбирать различные элементы настройки и управлять отправленными и полученными данными.
Управление разрешениями назначает роли пользователям. Один и тот же пользователь имеет функции разных ролей и дает ролям разные разрешения для управления системой, что обеспечивает гибкость и безопасность. Основная функция модуля управления журналами — запись и хранение некоторых изменений, добавлений и удалений пользователей, а также отображение их пользователям в режиме журнала при выполнении ими операций запроса.
Как показано на рисунке 10.

Заключение
В этой статье разрабатывается система мониторинга состояния и управления задачами AGV в реальном времени на основе веб-приложений. Эта система обеспечивает взаимодействие человека и компьютера с AGV в различных сценариях, позволяя пользователям получать мониторинг рабочего состояния транспортного средства и соответствующую информацию в режиме реального времени, просматривать статус выполнения задач, а также реализовывать функции удаленного планирования и управления. Она отличается удобством эксплуатации, высокой производительностью и надежностью. Высокая безопасность Преимущество заключается в том, что он эффективно решает проблему неудобного мониторинга и управления, вызванную работой транспортных средств на сложных производственных линиях. В условиях сегодняшнего быстрого развития производственной и логистической отраслей он имеет широкое применение.
Известные предприятия
Трехмерный склад | Робот AGV |
WMS | WCS | Транспортировка |
|Планирование| |Отчеты|
Производство | Электронная коммерция | Экспресс-доставка | Обувь и одежда Мебель Супермаркеты |
Розничная торговля | Холодовая цепь |



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
