Принцип и метод компенсации ошибки шага FANUC
Здесь вас ждет новейшая информация, такая как программирование ЧПУ, токарная и фрезерная обработка, общая токарная обработка, Mastercam, новейшие разработки в отрасли, механические видеоролики, производственные процессы, обрабатывающие центры, пресс-формы, ЧПУ и т. д.
1. Причины ошибки шага
①Шариковинтовая пара расположена на последней ступени трансмиссионной цепи системы подачи. Существуют различные ошибки в винте и гайке, такие как совокупная ошибка шага резьбы, ошибка дорожки качения резьбы, ошибка диаметра и т. д. Совокупная ошибка шага винта приведет к отклонению целевого значения станок.
② В процессе сборки ШВП из-за двойной опорной конструкции винт удлиняется в осевом направлении, что приводит к увеличению ошибки шага винта и отклонению целевого значения станка.
③В процессе сборки станка ошибка параллельности между осью винта и направляющей станка приведет к отклонению от целевого значения станка.

2. Роль компенсации ошибки тангажа
Компенсация ошибки шага регулирует параметры системы ЧПУ для увеличения или уменьшения количества импульсов значения команды, чтобы фактическое расстояние перемещения станка было близко к расстоянию перемещения команды, чтобы повысить точность позиционирования станка. Компенсация ошибки шага действует только на компенсационную часть станка и играет компенсационную роль в пределах диапазона, разрешенного системой ЧПУ.
3. Метод компенсации ошибки тангажа
Путем установки данных компенсации ошибки шага компенсируется блок обнаружения каждой оси. Используя положение, возвращенное в референтную точку, в качестве начала коррекции, установите интервал компенсации для каждой оси. Установите значение компенсации, соответствующее количеству точек компенсации в данных компенсации ошибки шага. Данные компенсации ошибки шага также можно установить через внешние устройства ввода-вывода (например, Handy File) (см. руководство пользователя) или непосредственно через панель MDI.
При компенсации ошибки шага необходимо установить следующие параметры. Для количества точек компенсации ошибки основного тона, заданного этими параметрами, необходимо установить величину компенсации ошибки основного тона. Параметры компенсации ошибки тона показаны в таблице ниже.
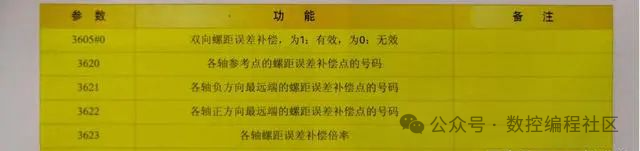
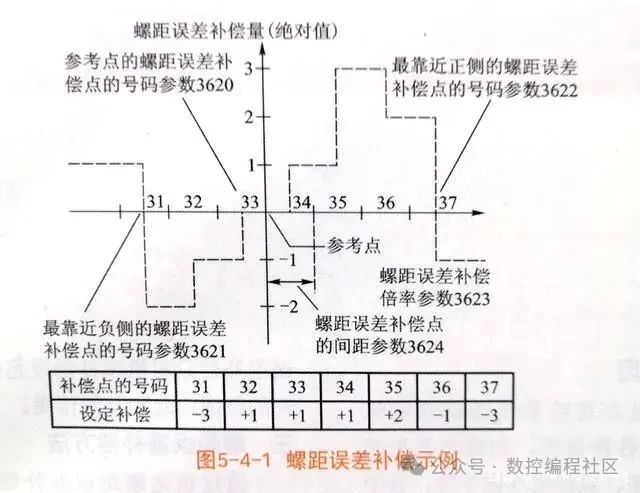
Пример компенсации ошибки основного тона показан на рисунке 5-4-1.
1. Обозначение компенсационных точек
Точки компенсации каждой оси выбираются в пределах диапазона механического перемещения оси координат, и опорная точка должна быть включена в диапазон компенсации. Когда механический ход превышает указанный диапазон с положительной и отрицательной сторон, компенсация ошибки шага не выполняется (все величины компенсации становятся равными 0).
2. Компенсационные баллы
Страница настройки ошибки шага предоставляет в общей сложности 1024 точки в диапазоне от 0 до 1023, и это число произвольно назначается каждой оси посредством параметров.
Параметр 3620 задает номер точки компенсации ошибки шага для опорной точки для каждой оси, параметр 3621 задает номер точки компенсации ошибки шага, ближайшей к отрицательной стороне, а параметр 3622 устанавливает номер точки компенсации ошибки шага, ближайшей к отрицательной стороне. Положительная сторона.
3. Расстояние между точками компенсации
Точки компенсации ошибки шага расположены на одинаковом расстоянии друг от друга, и каждая ось задается в параметре 3624.
Точка компенсации ошибки тангажа имеет минимальный предел, который определяется по следующей формуле:
①Минимальное значение шага в точке компенсации отклонения шага = максимальная скорость подачи (скорость быстрого перемещения)/7500.
②Минимальное значение шага точки компенсации отклонения шага можно выбрать из мм, дюймов, (.)
③Дополнительные единицы измерения максимальной подачи: мм/мин, дюйм/мин, (.)/мин.
Например, когда максимальная скорость подачи составляет 15000 мм/мин, минимальный шаг точки компенсации ошибки шага составляет 2 мм.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
