[Принцип автоматического управления] Метод анализа во временной области: временной отклик и динамические характеристики систем первого, второго и высшего порядка.
Глава 3. Метод анализа во временной области
- система Анализ означаетсистемаизСтабильность, погрешность и динамикаТри аспектаизпроизводительностьпровести анализ,то есть анализсистемаизСтабильность, точность и скорость。
- Стабильность: (основное требование) система может вернуться в исходное положение равновесия после воздействия возмущения;
- Точность: (Требование к установившемуся состоянию) Ошибка между установившимся выходным сигналом и идеальным выходным сигналом (установившаяся ошибка) должна быть небольшой;
- Быстрота: (динамическое требование). Процесс реакции на скачок должен быть плавным и быстрым.
- После создания математической модели системы управления можно использовать различные методы для анализа и изучения управления системой. анализ обсуждаемый в этой статье во временной области является одним из важных методов.
- во временной области,Вышеуказанные три аспекта производительности можно получить, решив дифференциальное уравнение, описывающее систему управления.,Решение дифференциального уравнения определяется структурными параметрами, начальными условиями и входными сигналами, управляющими системой.
- Анализ во временной области относится кво временной области Исследоватьсистема При определенном входном сигналеизпод влиянием,Изменение его выходного сигнала со временем.
3.1 Основные понятия
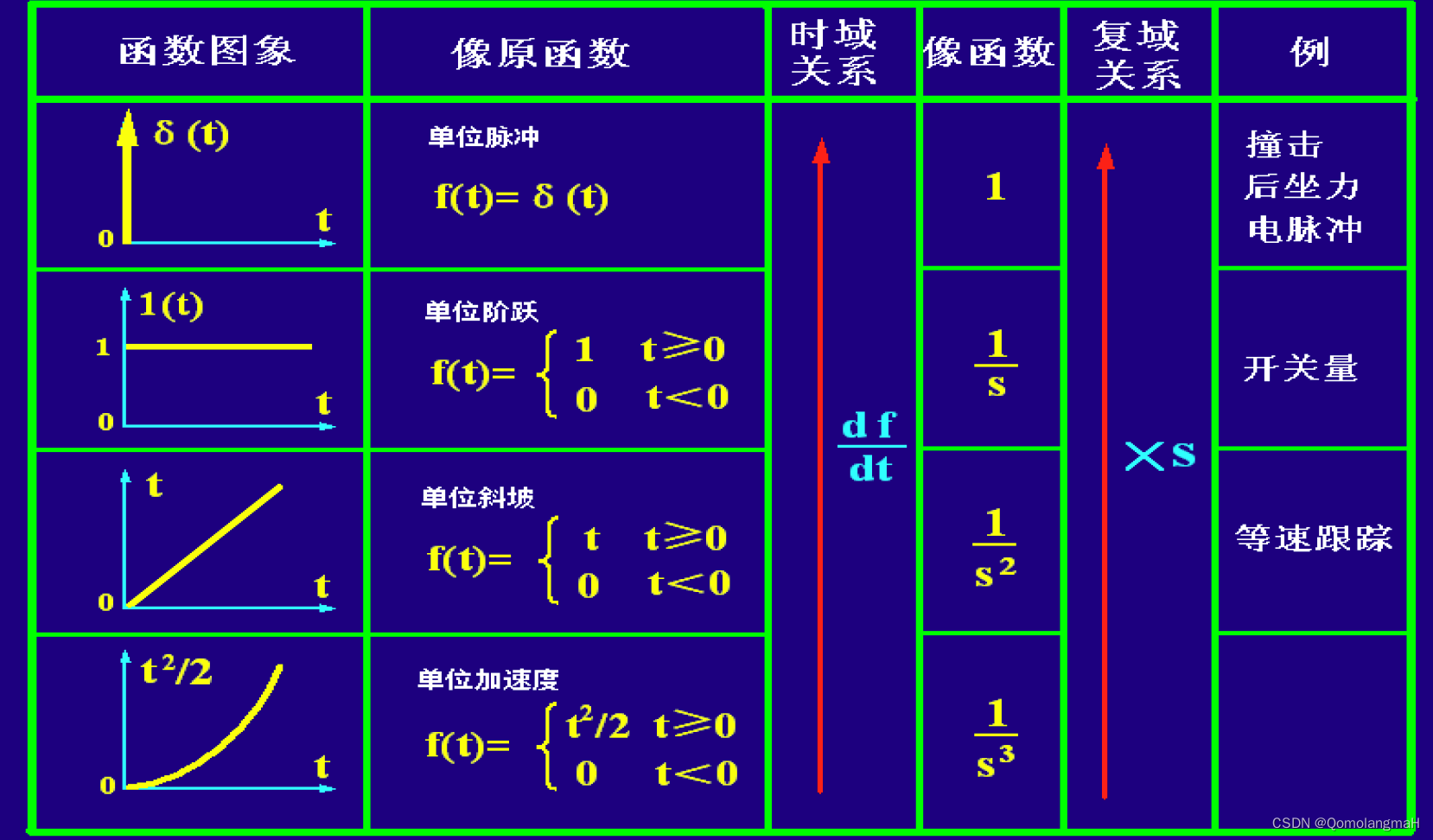
3.1.1 Типичные входные сигналы
При анализе и проектировании систем управления необходимо иметь основу для сравнения характеристик различных систем управления. Эта основа состоит в том, чтобы назначить в качестве входных сигналов системы некоторые типовые экспериментальные сигналы, а затем сравнить работу различных систем управления. Эти типичные реакции на входной сигнал анализируются и оцениваются. Таким образом, анализ системы во временной области основан на том, что система принимает типичные входные сигналы. При выборе типовых входных сигналов необходимо учитывать следующие принципы: выбранный входной сигнал должен отражать большую часть реальных состояний системы в процессе ее работы, быть максимально простым по форме, чтобы облегчить анализ реакции системы; он должен быть в состоянии заставить систему работать в худшем случае: она должна быть практически достижима или приблизительно достижима и т. д. В технике управления обычно используются следующие типичные сигналы: сигнал шага, сигнал скорости, сигнал ускорения, импульсный сигнал, синусоидальный сигнал и т. д. Эти типичные входные сигналы представляют собой простые функции времени, которые очень удобны для математической обработки, а также могут быть реализованы или приближенно реализованы в реальной технике, то есть могут проводиться экспериментальные исследования.
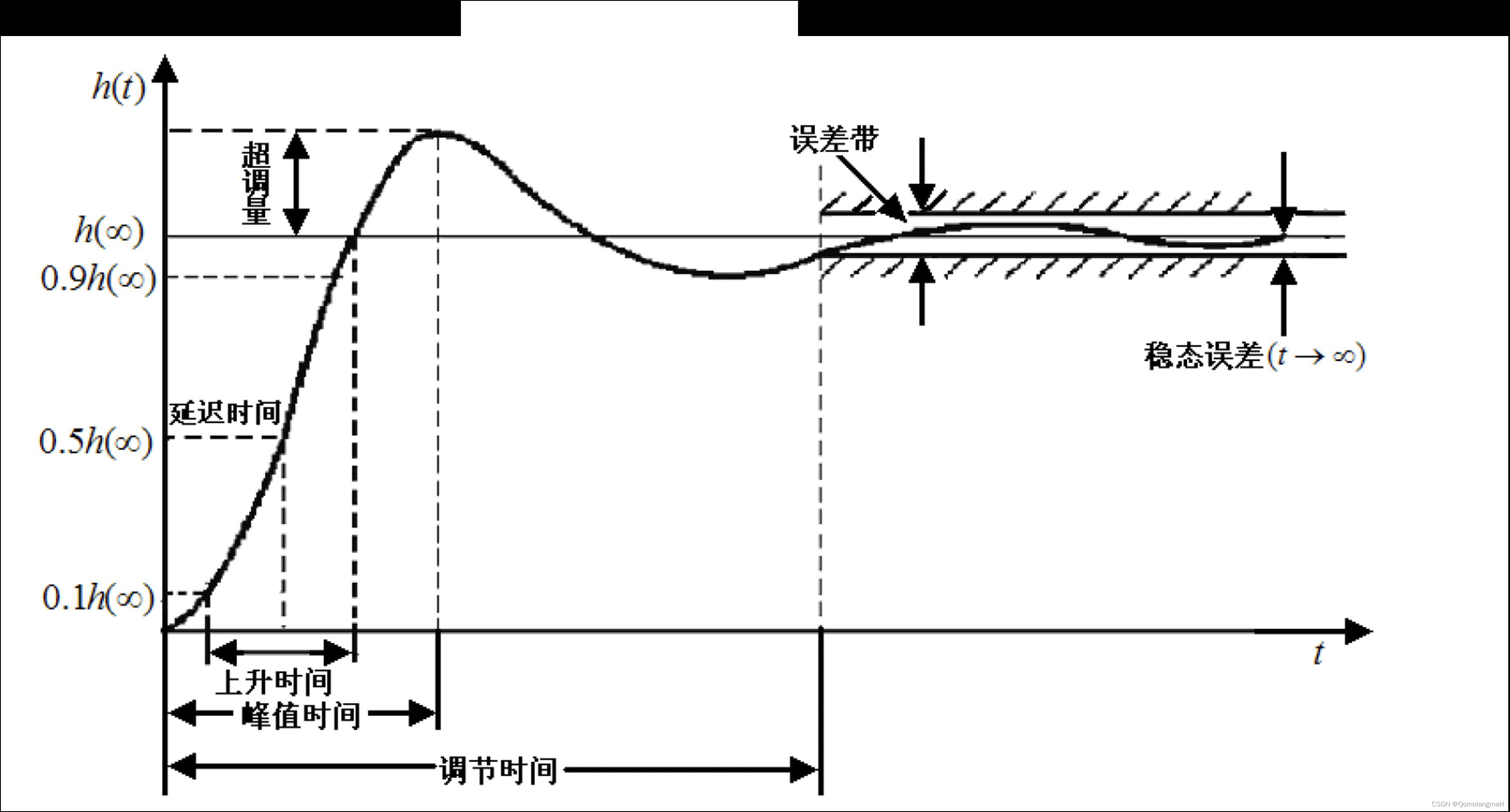
3.1.2 Показатели динамических характеристик системы
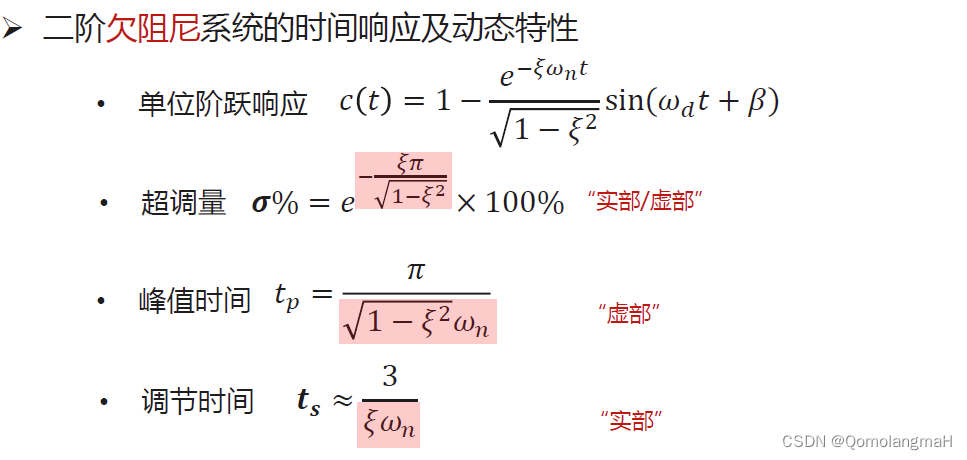
- Пиковое время tp: время, необходимое переходному процессу для пересечения конечного значения и достижения первого пика.
- Превышение 𝝈%: процент, на который пиковое значение превышает конечное значение.
- Время регулировки 𝒕𝒔: время, необходимое для того, чтобы переходная реакция достигла и оставалась в пределах 5 % от конечного значения.
- Время задержки 𝑡𝑑: время, необходимое для того, чтобы переходная реакция впервые достигла 50 % от конечного значения.
- время подъема 𝑡r
- Время, необходимое для повышения переходной характеристики с 10 % конечного значения до 90 % конечного значения. (без шока)
- Время, необходимое для перехода от 0 до момента первого достижения конечного значения. (с шоком)
3.2. Временной отклик и динамические характеристики систем первого порядка
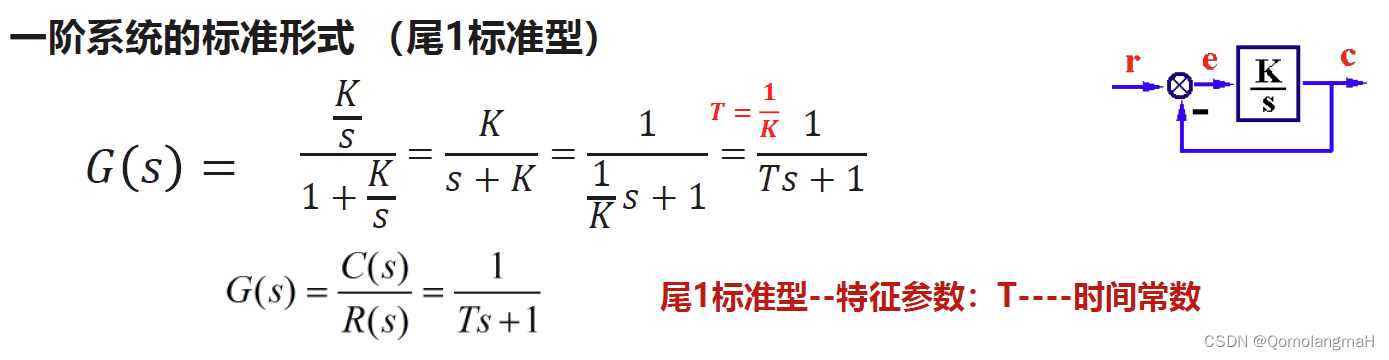
Стандартная форма системы первого порядка (стандартная форма с хвостиком 1)
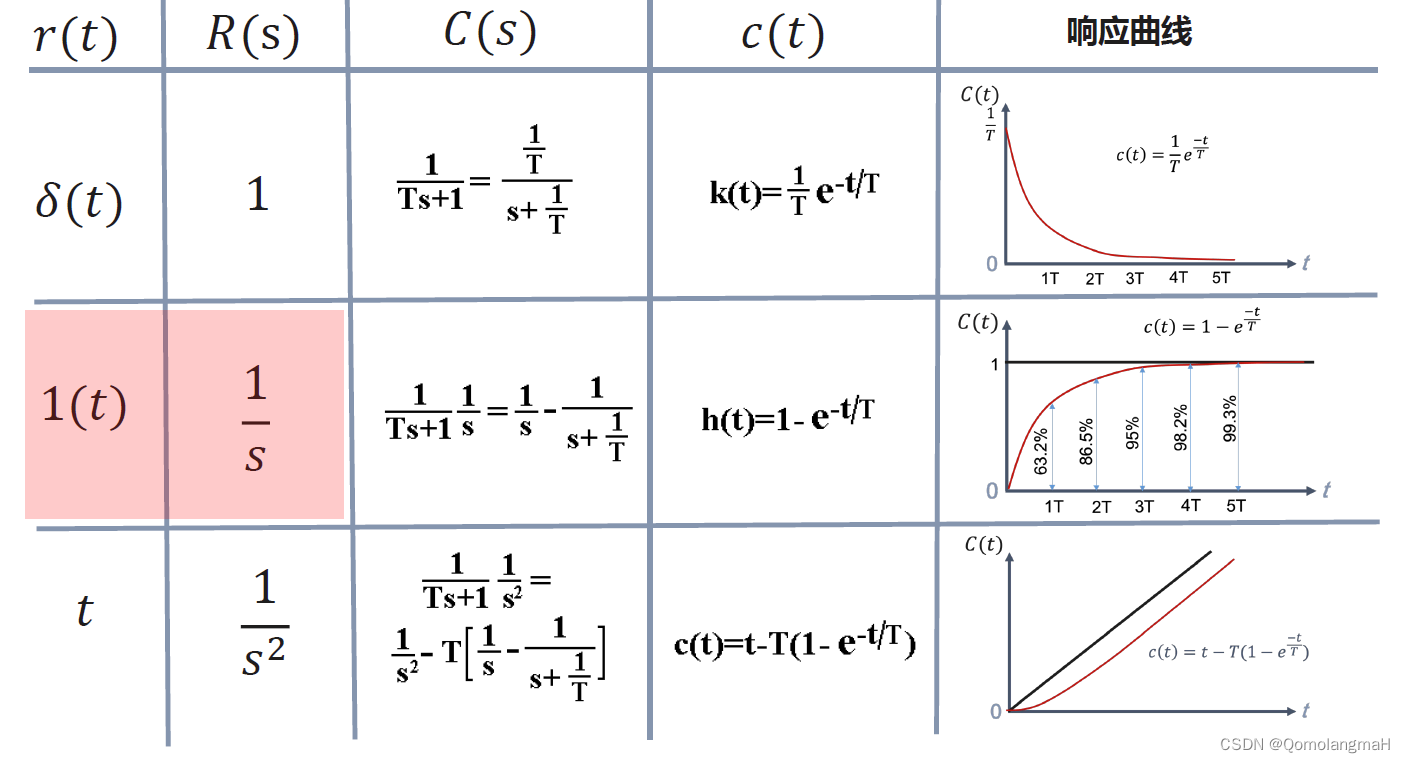
- Единичная переходная характеристика инерционного звена первого порядка

3.2.1. Переходная характеристика устройства инерциального звена первого порядка.
- Инерционное звено первого порядка устойчиво и не имеет колебаний.
- По истечении времени Т кривая поднимается на высоту 0,632. Если время, необходимое для достижения кривой отклика высоты 0,632, измерено экспериментально, то это время является постоянной времени Т инерционного звена первого порядка.
- первый заказсистемаиз Время регулировки3T
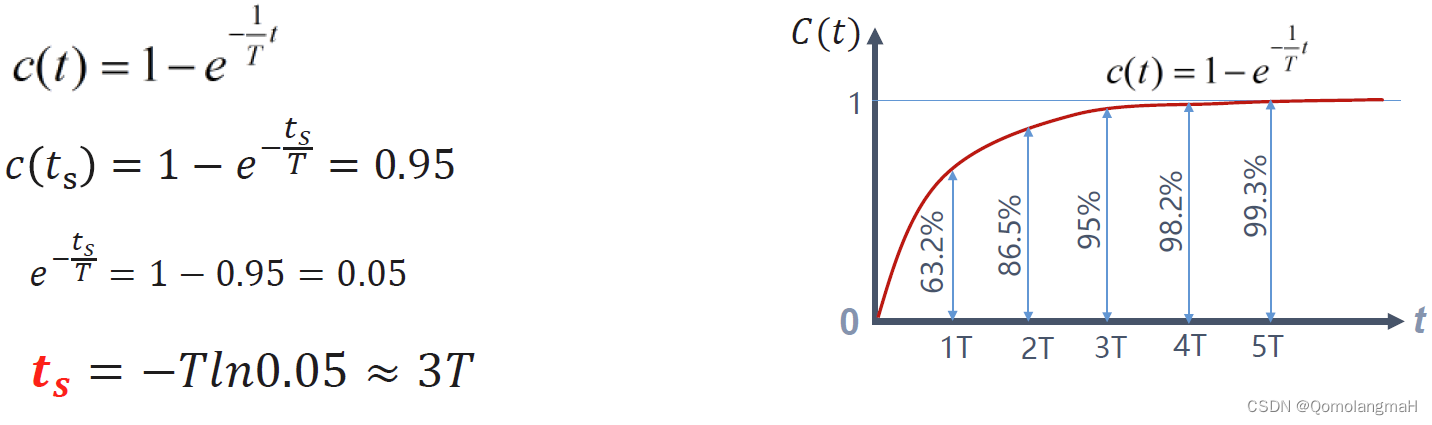
- Через время 3T~4T кривая отклика достигла установившегося значения. 95%~98%,В технике можно считать, что процесс переходного процесса в основном завершен.,системавходит в установившийся процесс
- Постоянное время Т отражает присущие характеристики инерционного звена первого порядка.,Чем меньше его значение,система Чем меньше инерция,Чем быстрее ответ
3.2.2 Скоростная характеристика агрегата инерциального звена первого порядка
3.2.3 Единичная импульсная характеристика инерционного звена первого порядка
3.2.4 Свойства временного отклика линейной стационарной системы
Существует дифференциальная и интегральная зависимость между тремя типичными входными сигналами единичного импульса, единичного шага и единичной скорости, и такая же дифференциальная зависимость существует между единичной импульсной характеристикой, единичной переходной характеристикой и единичной скоростной характеристикой инерционного звена первого порядка. связь с точками. Следовательно, реакция системы на производную входного сигнала может быть получена как производная реакции системы на входной сигнал: а интегральная реакция системы на входной сигнал может быть получена путем интегрирования реакции системы на входной сигнал и ее интеграла. постоянная Определяется начальными условиями. Это важное свойство временного отклика линейной устойчивой системы, то есть если входной сигнал системы имеет дифференциальную и интегральную зависимость, то временной отклик системы также имеет соответствующую дифференциальную и интегральную зависимость.
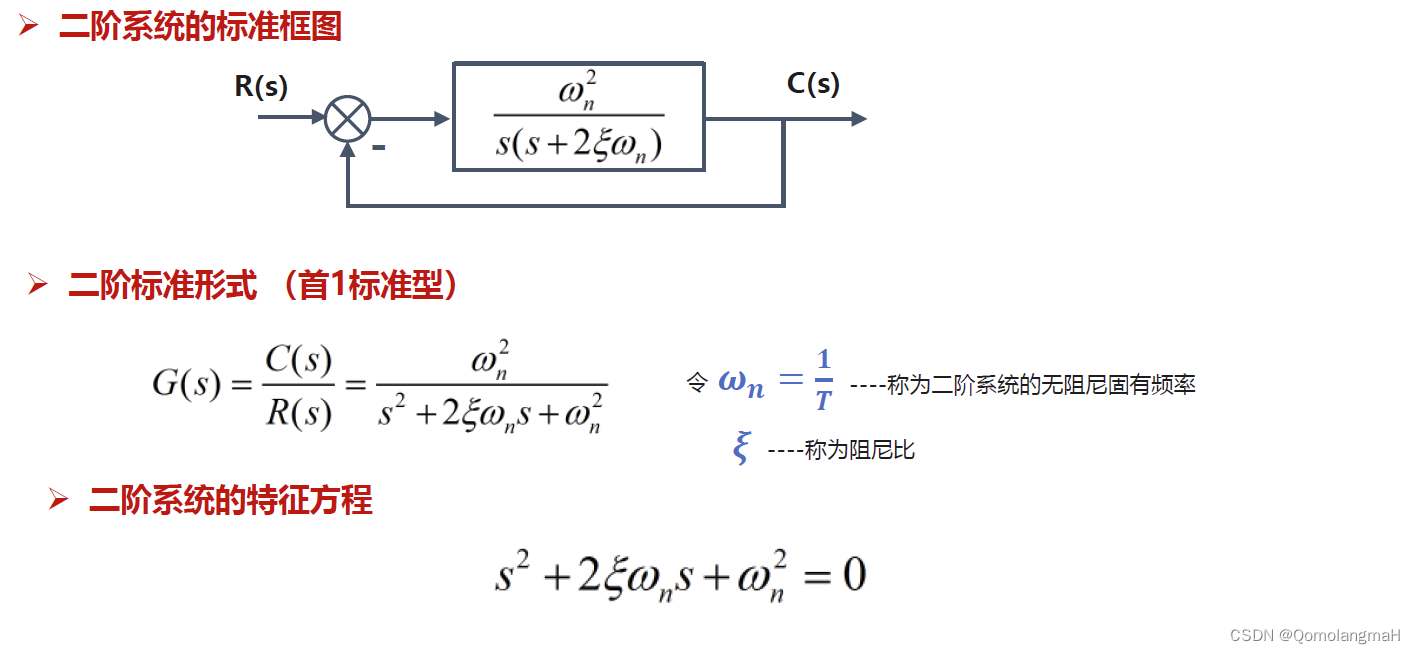
3.3. Временной отклик и динамические характеристики систем второго порядка
Основные понятия о системах второго порядка
- Любая система, которую можно описать дифференциальным уравнением второго порядка, называется системой второго порядка.
- физически говоря,Система второго порядка содержит два независимых элемента накопления энергии.,Энергия обменивается между двумя элементами,Сделайте так, чтобы система имела тенденцию раскачиваться вперед и назад.,Поэтому систему второго порядка еще называют звеном колебаний второго порядка.
- Многие реальные системы являются системами второго порядка, и системы более высокого порядка при определенных условиях также могут быть упрощены до систем второго порядка.
- Поэтому анализ временного отклика и характеристик системы второго порядка имеет большое практическое значение.
- Типичная передаточная функция системы второго порядка:

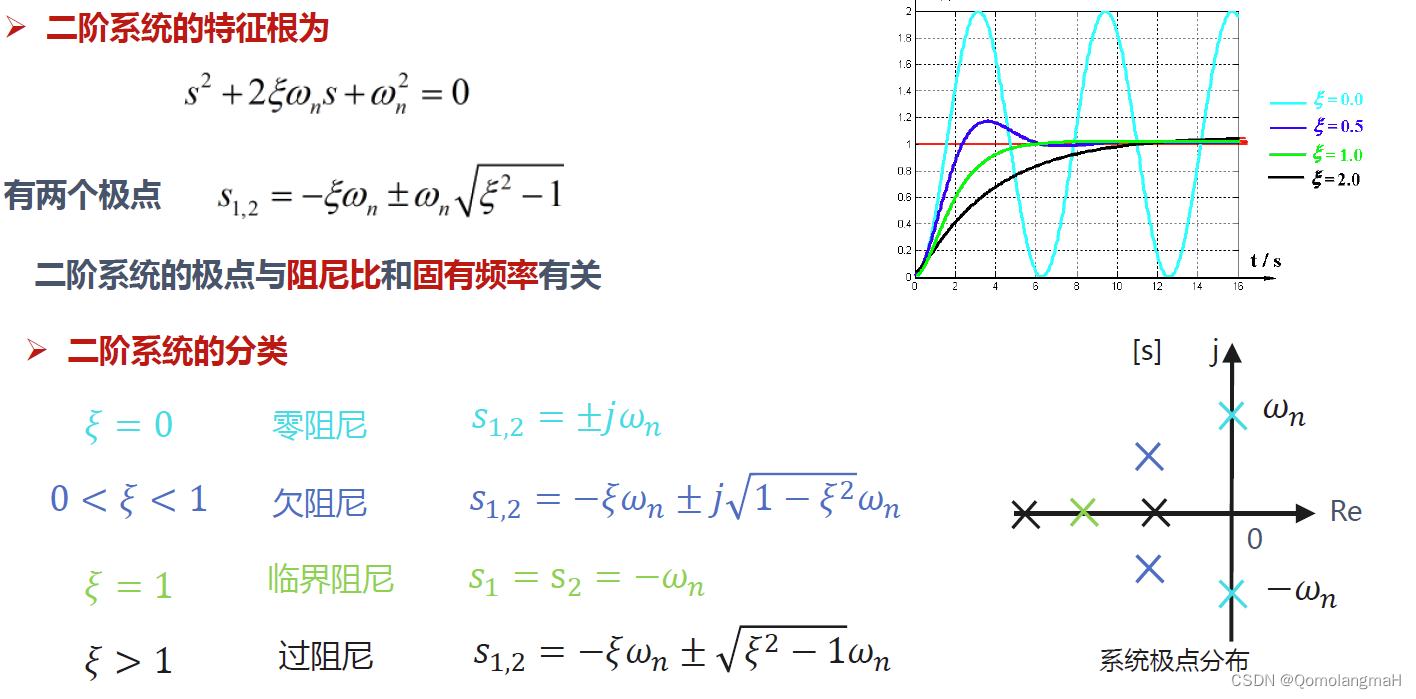
Критически демпфированные и чрезмерно демпфированные системы
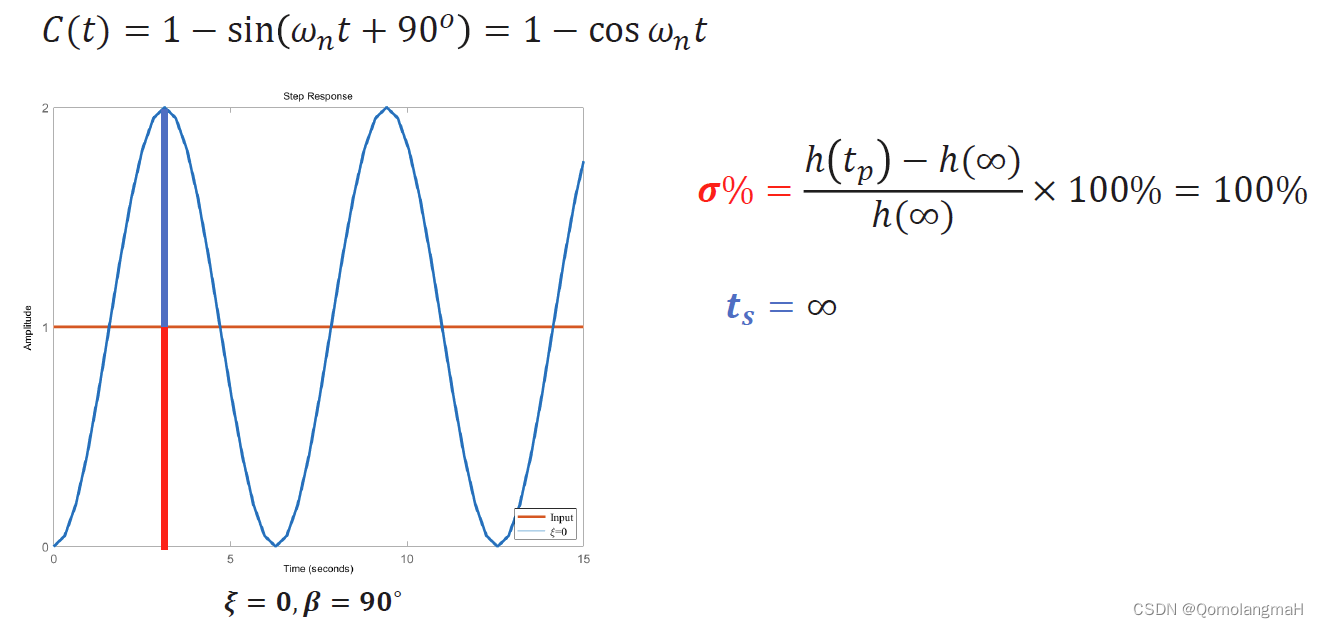
система нулевого демпфирования
Демпфированная система
назад
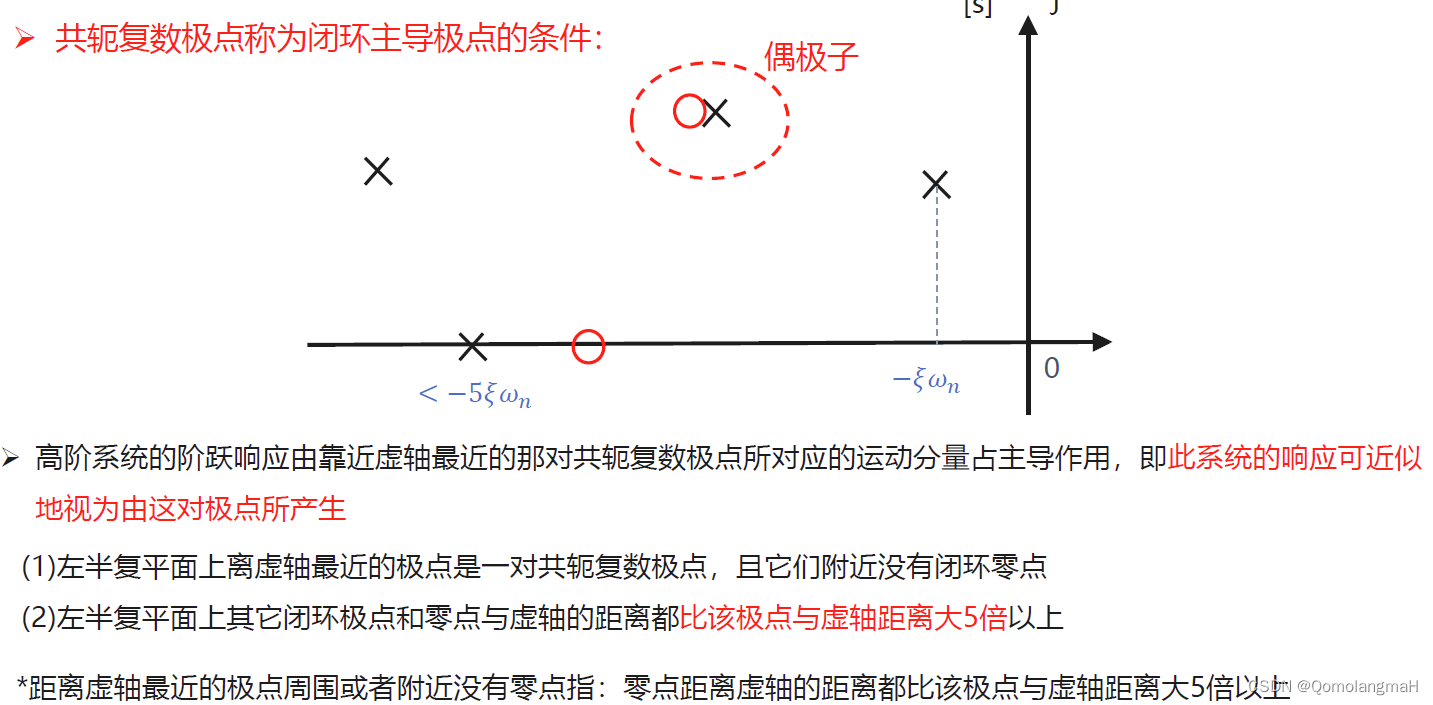
3.4. Временной отклик и динамические характеристики систем высокого порядка.
pass



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
