[PCL] Знакомство с библиотекой облаков точек PCL и настройка среды VS
Введение в PCL
PCL — это кроссплатформенная библиотека обработки облаков точек, используемая для визуализации облаков точек, сегментации, кластеризации и других приложений.
PCLОфициальный сайт здесь:https://pointclouds.org/
GithubБиблиотека здесь(Используется здесь1.8.1):https://github.com/PointCloudLibrary/pcl/releases/tag/pcl-1.8.1
Конфигурация среды Windows PCL
этотБоссЭто было очень ясно написано два года назад.,Воспроизведите это здесь.
Установка ALLInOne:
Установка сторонней библиотеки (все установлено на сторонней):
Распакуйте pdb и скопируйте в bin:
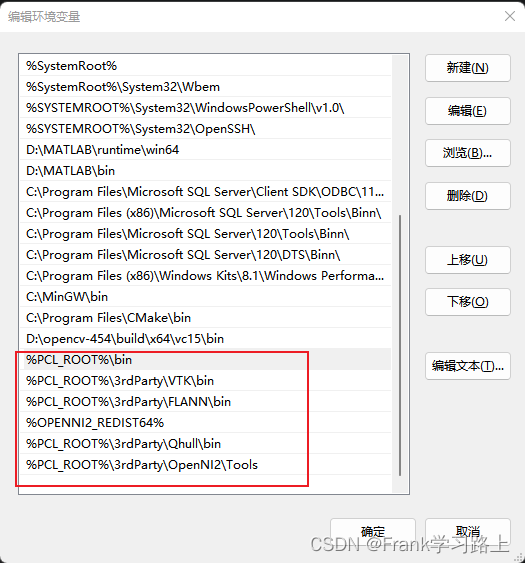
Добавьте переменные среды:
Добавить каталог включения:
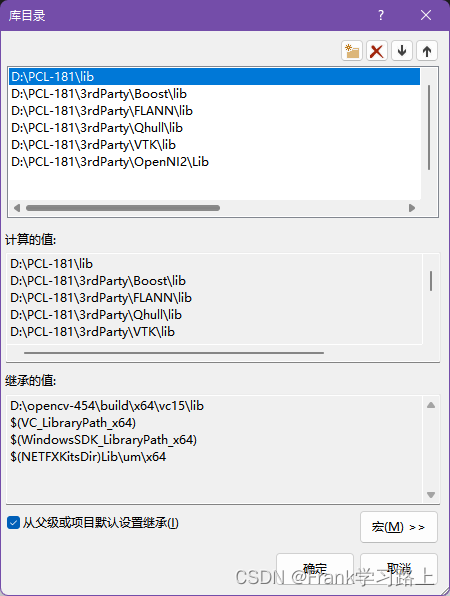
Добавить каталог библиотеки:
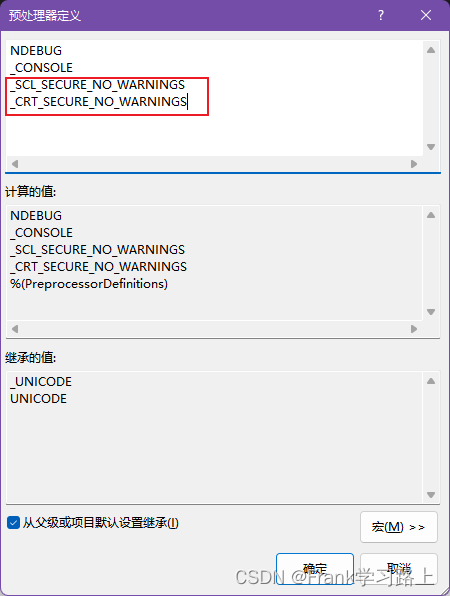
Добавьте определение препроцессора:
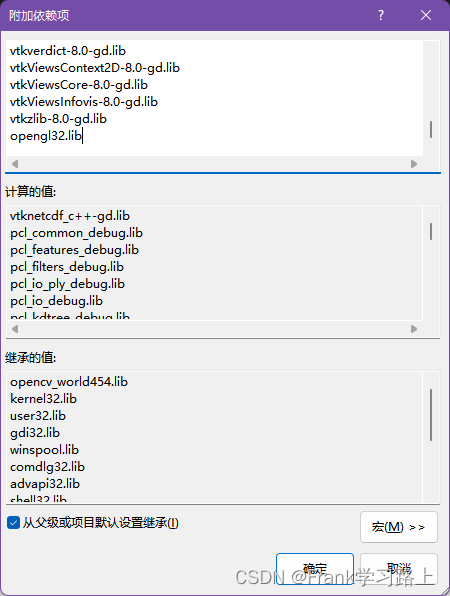
Добавьте дополнительные зависимости (много элементов):
Установите для проверки SDL значение Нет, иначе возникнет ошибка C4996:
Скопируйте код в main:
// pcl181
#include<iostream>
#include<pcl/io/io.h>
#include<pcl/io/pcd_io.h> //pcd Заголовочные файлы, относящиеся к классам чтения и письма.
#include<pcl/io/ply_io.h>
#include<pcl/point_types.h> //Файлы заголовков типов точек, поддерживаемые в PCL
#include<pcl/visualization/cloud_viewer.h>
using namespace std;
int user_data;
void viewerOneOff(pcl::visualization::PCLVisualizer& viewer) {
viewer.setBackgroundColor(1.0, 0.5, 1.0); //Установим цвет фона
}
int main()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
char strfilepath[256] = "rabbit.pcd";
// Определите, существует ли файл pcd
if (-1 == pcl::io::loadPCDFile(strfilepath, *cloud)) {
cout << "error input!" << endl;
return -1;
}
cout << cloud->points.size() << endl; //Печать размера облака точек
pcl::visualization::CloudViewer viewer("Cloud Viewer"); //Создаем объект просмотра
viewer.showCloud(cloud); //отображение облака точек
viewer.runOnVisualizationThreadOnce(viewerOneOff);
system("pause");
return 0;
}Если спереди все Конфигурация,Он также запрашивает при запускеОтсутствует библиотека dllслова,Должно быть так, что либа не была загружена в проект.,Просто перезапустите проект.
Итоговый эффект от чтения кролика следующий (очень красивый):
На этом этапе среда наконец настроена, и я надеюсь, что все с настройкой справятся. (Может быть, я смогу начать печатать код)
Конфигурация среды Ubuntu PCL
В Ubuntu, если все устанавливают ros, библиотека облаков точек pcl будет установлена по умолчанию.,Вы также можете подтвердить установку:sudo apt install libpcl-dev
Затем введите в терминалеpcl_viewerЕсли вывод есть, значит проблем с установкой нет.。
Если вам нужно установить другие версии, вы можете скачать исходный код и скомпилировать его. У меня пока в этом нет необходимости, и этого пока достаточно.
Вот и все.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
