Объединение датчиков GPS-IMU для надежной автономной оценки положения транспортного средства
01 представлять
Интеграция систем глобального позиционирования (GPS) и инерциальных измерительных блоков (IMU) стала краеугольным камнем надежного и точного отслеживания местоположения в автономной навигации транспортных средств, особенно в сложных условиях. Хотя GPS обеспечивает широкое покрытие и высокоточное позиционирование на открытом воздухе, его производительность ухудшается в помещении или в местах, где сигналы заблокированы, например, в городских каньонах. Напротив, IMU предоставляют ценные данные о движении независимо от внешних сигналов и незаменимы в районах без сигналов GPS. Однако на полезность IMU влияет дрейф во времени, что приводит к накоплению ошибок в оценках скорости и положения, полученных на основе данных об ускорении.
Чтобы смягчить ограничения каждого типа датчиков, ключевой стратегией становится объединение данных GPS и IMU. Это объединение направлено на использование возможностей глобального позиционирования GPS и относительного движения IMU для повышения надежности и точности автономных навигационных систем транспортных средств. Применение передовых методов байесовской фильтрации, в частности расширенного фильтра Калмана (EKF) и фильтра Калмана без запаха (UKF), помогает эффективно интегрировать эти датчики. Такой подход обеспечивает бесперебойную и надежную навигацию, что имеет решающее значение для надежной работы автономных транспортных средств, особенно в средах с нарушенными сигналами GPS.
В этом проекте используется KITTI Наборы данных GNSS и IMU используются для проверки, демонстрируя его потенциал в условиях реальных экспериментов. Эти инициативы помогают обеспечить Автономное вождениеVehicles развивает технологическую инфраструктуру и решает важнейшие проблемы безопасности и производительности, с которыми в настоящее время сталкивается отрасль.
02 литературный обзор
Во второй части статьи подробно описано применение GPS и IMU в Автономном путем обзора ссылок. вождение Роль и ограничения в навигации транспортных средств,и важность объединения данных этих двух датчиков. Конкретно,Эта часть контента в основном включает в себя следующие аспекты:
· Преимущества и ограничения GPS:GPSМожет предоставить точную информацию о местоположении в глобальном масштабе,Хорошо работает на открытых площадках и при беспрепятственном обзоре. Однако,В таких средах, как закрытые помещения и городские каньоны.,Сигнал GPS может быть заблокирован,вызывая ухудшение его производительности.
· Преимущества и ограничения IMU:IMUСостоит из гироскопа и акселерометра.,Может предоставить информацию об относительном движении,Например, изменения ускорения и вращения. В отличие от GPS,На IMU не влияют внешние сигналы,Поэтому это очень полезно в средах с ограничениями по GPS. Однако,IMU склонен к дрейфу из-за накопления ошибок.,Это приводит к неточным оценкам положения и скорости.
· Важность интеграции GPS и IMU:Чтобы преодолеть ограничения соответствующих датчиков,Объединение данных GPS и IMU стало ключевой стратегией. Это объединение может использовать возможности глобального позиционирования GPS и информацию об относительном движении, предоставляемую IMU.,Тем самым повышается надежность и точность навигационной системы автомобиля «Автономное вождение». Особенно в условиях, когда сигналы GPS блокируются.,Технология Fusion может значительно повысить надежность и точность навигационных систем.
· Технология термоядерного синтеза:авторпредставлятьрасширенный фильтр Калмана(EKF)и фильтр Калмана без запаха.(UKF)и другие передовые методы байесовской фильтрации.,Эти технологии могут эффективно объединять данные GPS и IMU. EKF обрабатывает нелинейные системы посредством линеаризации.,UKF занимается непосредственно нелинейными системами.,Поэтому больше подходит для обработки Автономное вождение Сложные нелинейные задачи навигации транспортных средств.
03 метода
Авторы предлагают метод использования фильтра Калмана без запаха (UKF) для объединения данных GPS и IMU для повышения надежности и точности навигационной системы.
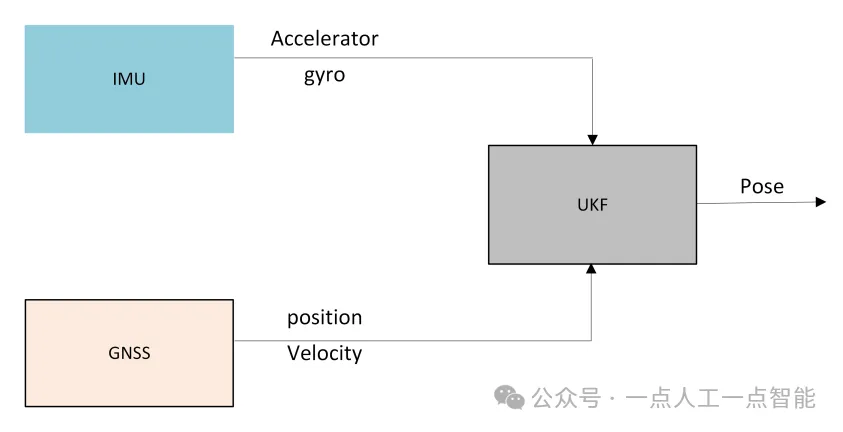
первый,Автор должности разъяснил основные принципы UKF. UKF — это усовершенствованный метод байесовской фильтрации.,Он использует преобразования без запаха (UT) для работы с нелинейными системами. В отличие от расширенного фильтра Калмана (EKF),УКФ не требует линеаризации системы,Следовательно, состояние нелинейной системы можно оценить более точно. UKF фиксирует среднее значение и ковариацию распределения штата, выбирая набор точек выборки.,Эти точки затем распространяются по нелинейной системе.,Это более эффективно сохраняет характеристики распределения.
На этапе прогнозирования UKF вычисляет набор сигма-точек и обновляет среднее значение и ковариацию процесса. Эти сигма-точки генерируются на основе среднего значения и ковариации текущего состояния, распространяются через нелинейную систему и обновляют среднее значение и ковариацию прогнозируемого состояния.
На этапе измерения UKF использует сигма-точки прогнозируемого состояния для оценки значения измерения и вычисляет коэффициент Калмана для обновления состояния и ковариации. Таким образом, UKF может более точно объединить данные GPS и IMU, тем самым улучшая производительность навигационной системы.
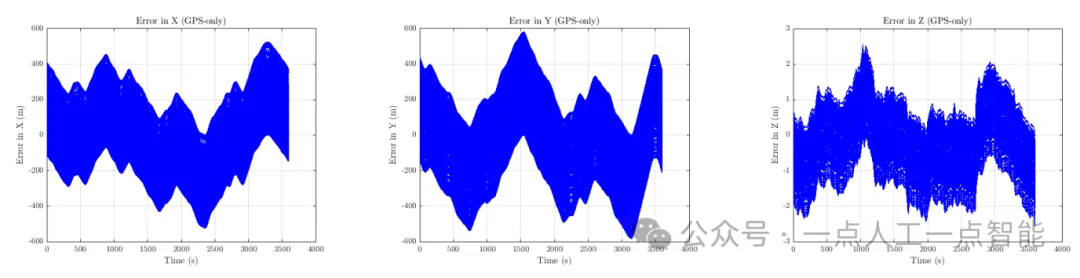
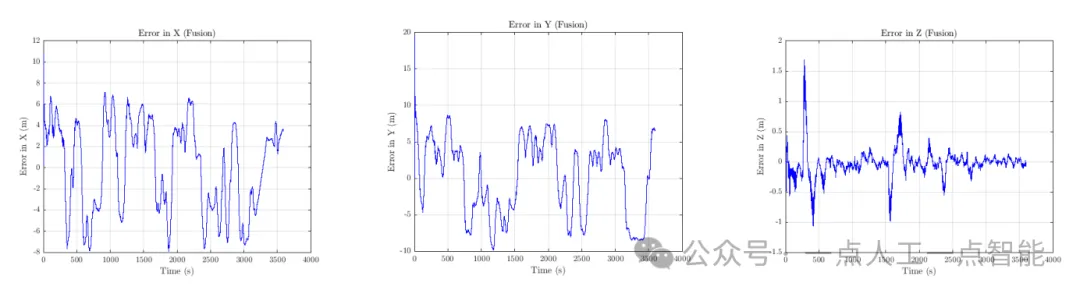
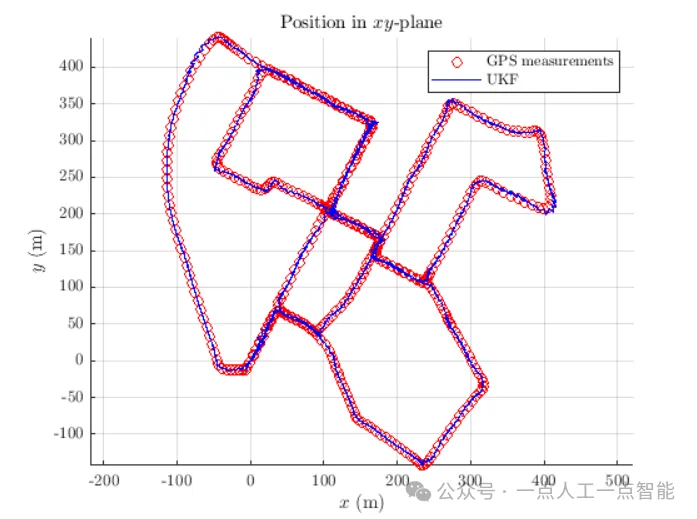
Автор использует KITTI Наборы данных GNSS и IMU для проверки их метода. Сравнивая данные только GPS и объединенные данные, авторы демонстрируют потенциал технологии объединения GPS и IMU для повышения точности навигации. Результаты эксперимента показывают, что метод слияния может значительно снизить среднеквадратическую ошибку (RMSE) оценок местоположения по сравнению с использованием только GPS. Например, RMSE начинается с 13.214, 13,284 и 13,363 были уменьшены до 4,271 соответственно, 5,275 и 0,224, соответствующие осям x, y и z соответственно.
в общем,В этом разделе подробно описано, как использовать UKF для объединения данных GPS и IMU.,Повысить точность и надежность навигации транспортных средств с автономным вождением в условиях ограниченного доступа к GPS. Проверка с использованием эксперимента с набором данных KITTI.,Авторы продемонстрировали эффективность и осуществимость своего метода в практическом применении.
04 эксперимент
В этой главе подробно описываетсяэкспериментчасть,который использовалKITTI Наборы данных GNSS и IMU для проверки предлагаемого метода. Эта часть контента в основном включает в себя следующие аспекты:
· Набор данныхпредставлять:авторпервыйпредставлять ПонятноKITTI Характеристики наборов данных GNSS и IMU. Набор данных KITTI обеспечивает динамичную и сложную реальную среду, содержащую записи дорожного движения в различных условиях вождения. Это общедоступный набор данных, который можно использовать для исследования и тестирования технологий автономного вождения.
· экспериментнастраивать:автор详细描述Понятноэксперимент的настраивать,Включает используемое аппаратное и программное обеспечение. Они использовали данные GNSS и IMU из набора данных KITTI.,и использовать его для определения положения и скорости автомобиля. в то же время,Авторы также использовали фильтр Калмана без запаха (UKF) для объединения данных.
· экспериментрезультат:автор展示Понятно使用UKFСлияниеGNSSиIMU数据的результат。они будутэкспериментрезультат与仅使用GNSS的数据进行Понятно比较。результат显示,По сравнению с использованием только GNSS,Методы слияния могут значительно уменьшить среднеквадратическую ошибку (RMSE) оценки положения. Например,RMSEот13.214, 13,284 и 13,363 были уменьшены до 4,271 соответственно, 5,275 и 0,224, соответствующие осям x, y и z Это показывает, что термоядерная технология существенно повышает точность навигации.
· Анализ результатов:автор对экспериментрезультат进行Понятно深入分析,Обсуждаются преимущества и проблемы термоядерной технологии в практическом применении. они указали,Хотя технология термоядерного синтеза может повысить точность навигации.,Однако такие вопросы, как калибровка и синхронизация датчиков, все еще необходимо учитывать в практических приложениях.
· в заключение:автор总结Понятноэкспериментрезультат,И подчеркнул важность термоядерной технологии в автономном вождении транспортных средств. они думают,Технология Fusion может повысить надежность и точность навигационной системы,Особенно в условиях, когда сигналы GPS заблокированы.
В целом, в этом разделе подробно описывается, как использовать KITTI. Процесс экспериментальной верификации наборов данных GNSS и IMU. Сравнивая данные только GNSS и объединенные данные, авторы демонстрируют потенциал технологии объединения GPS и IMU в повышении точности навигации. Результаты эксперимента показывают, что метод слияния может значительно снизить среднеквадратическую ошибку (RMSE) оценок положения по сравнению с использованием только GNSS, что важно для автономного управления. вождение Безопасная эксплуатация вашего автомобиля имеет первостепенное значение.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
