Модуль восприятия Apollo: сенсорный мониторинг | управление моделью препятствий |
введение
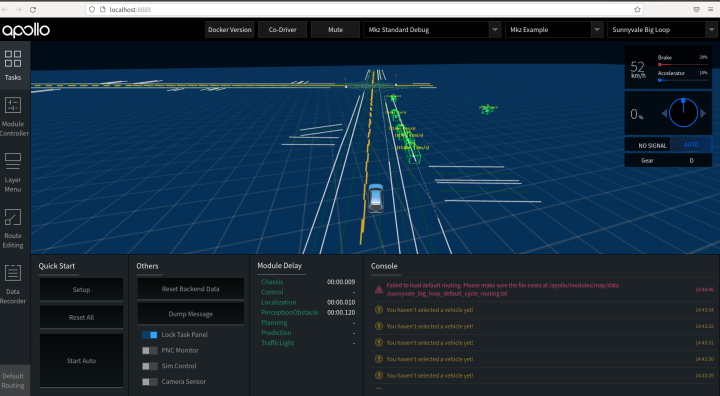
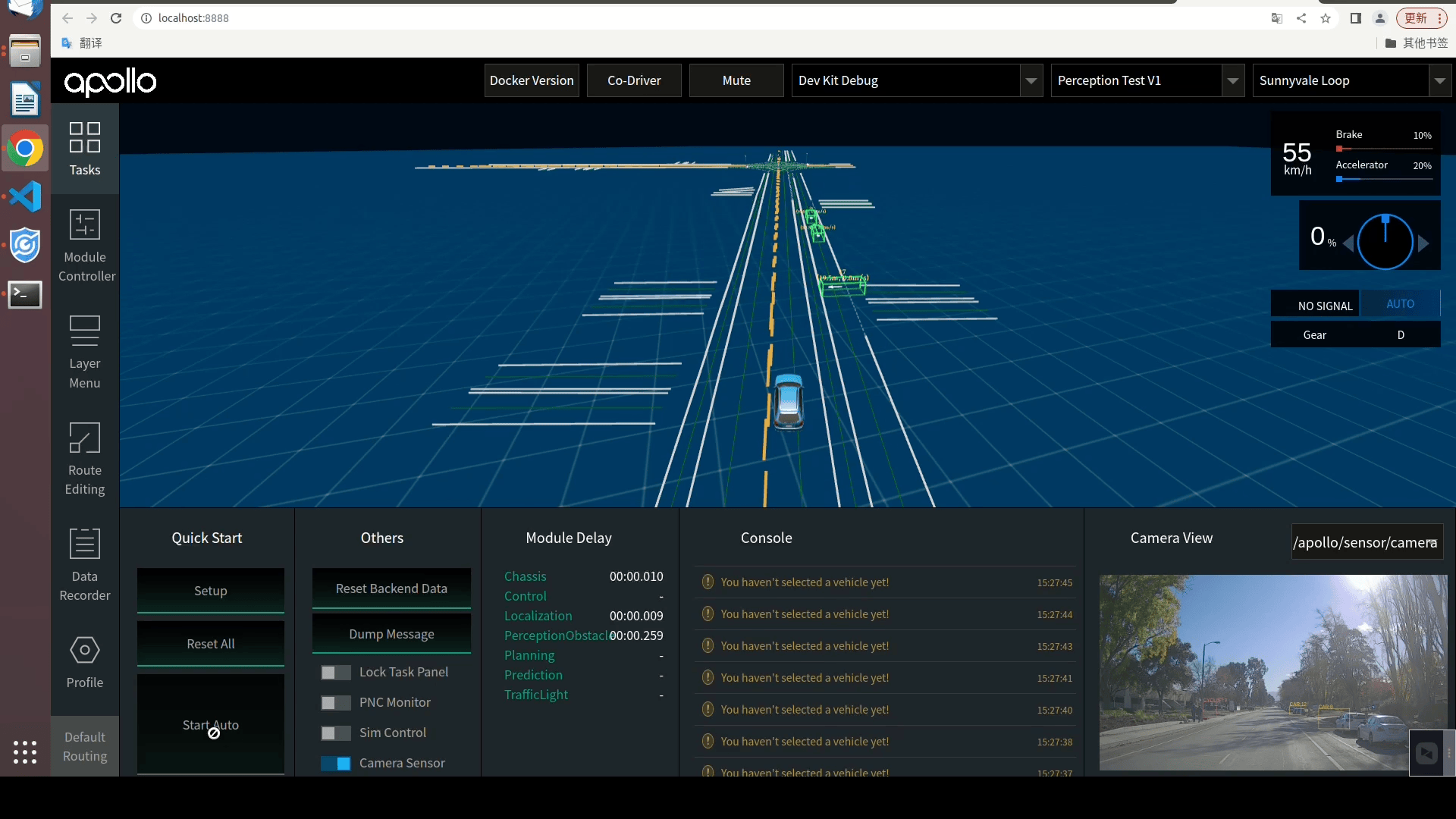
В технологии автономного вождения модуль восприятия является одним из основных компонентов системы автономного вождения. Модуль восприятия платформы Apollo играет ключевую роль, отвечая за сбор данных от различных датчиков для восприятия и понимания окружающей среды вокруг автомобиля.
1. Слияние датчиков
Платформа Apollo объединяет множество датчиков, включая лидар, камеры, радар и т. д. Каждый из этих датчиков предоставляет различные типы данных, например, лидар, предоставляющий информацию о расстоянии, камеры, предоставляющие информацию об изображении и т. д. Модуль восприятия использует технологию объединения датчиков для объединения данных от этих различных датчиков для получения более полной и точной информации об окружающей среде.
1.1 Подробное введение в объединение датчиков
1. Мультисенсорные источники данных: Система Apollo использует несколько типов датчиков, каждый из которых имеет свои уникальные характеристики и применимые сценарии. Лидар обычно используется для высокоточного обнаружения препятствий, камеры используются для визуального восприятия, а радар миллиметрового диапазона имеет лучшую адаптируемость к различным погодным условиям.
2. Объединение данных датчиков: Суть объединения датчиков заключается в объединении информации от разных датчиков для повышения точности и надежности восприятия окружающей среды. Это часто предполагает использование алгоритмов объединения датчиков, таких как фильтрация Калмана, расширенная фильтрация Калмана (EKF) и т. д., для интеграции измерений с различных датчиков.
3. Ли ДАР: Для высокоточного построения карт и обнаружения препятствий. LiDAR может предоставлять точную информацию о расстоянии и угле и подходит для высокоточного измерения на коротких расстояниях.
4. Камера: Предоставление визуальной информации для обнаружения цели, определения линии полосы движения и т. д. Визуальное восприятие играет важную роль в сложных дорожных условиях, но на него влияют такие факторы, как освещение и тени.
5. Радар миллиметрового диапазона: Адаптируйтесь к различным погодным условиям, таким как дождь и снег. Радар миллиметрового диапазона может обеспечить надежное обнаружение препятствий в плохую погоду.
6. ГНСС и инерциальные навигационные системы (ИНС): Используется для позиционирования автомобиля. Глобальные навигационные спутниковые системы (GNSS) предоставляют информацию о глобальном местоположении, а инерциальные навигационные системы используют такие датчики, как акселерометры и гироскопы, для оценки ускорения и угловой скорости транспортного средства.
7. Калибровка датчика: Чтобы обеспечить точность сварки, Apollo регулярно выполняет калибровку датчиков. Сюда входит внутренняя калибровка, такая как калибровка внутренних параметров камеры и лидара, а также внешняя калибровка, такая как выравнивание лидара по системе координат транспортного средства.
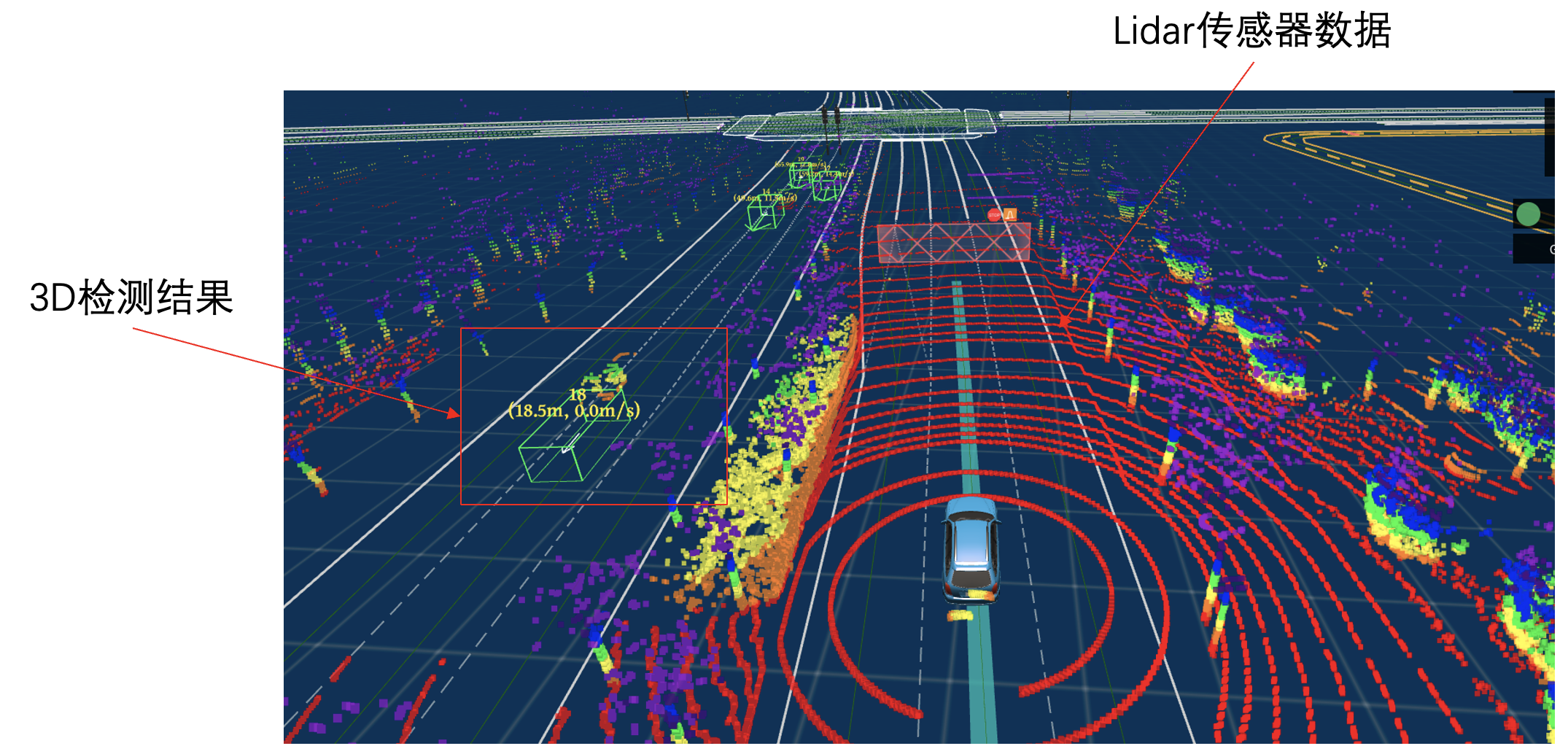
2. Обнаружение цели
На основе объединения датчиков модуль восприятия использует усовершенствованные алгоритмы обнаружения целей для идентификации и определения местоположения целевых объектов вокруг автомобиля. Целями могут быть другие транспортные средства, пешеходы, дорожные знаки и т. д. Обнаружение цели является ключевым этапом модуля восприятия, предоставляющим важную информацию для последующего принятия решений и планирования.
Пример кода обнаружения цели:
// Пример кода
#include <apollo/sensors/lidar.h>
#include <apollo/perception/object_detection.h>
int main() {
// Инициализировать лидар
Lidar lidar;
lidar.Init();
// Получить данные лидара
LidarData lidar_data = lidar.GetLidarData();
// Обнаружение цели
ObjectDetection object_detection;
std::vector<Object> detected_objects = object_detection.DetectObjects(lidar_data);
// Результаты испытаний процесса
for (const auto& obj : detected_objects) {
std::cout << "Detected Object: " << obj.type << " at (" << obj.x << ", " << obj.y << ")\n";
}
return 0;
}3. Идентификация препятствий
Благодаря обнаружению целей модуль восприятия может определить влияние идентифицированных целевых объектов на вождение автомобиля и классифицировать их как препятствия. Результаты распознавания препятствий имеют большое значение для этапов принятия решений и планирования системы автономного вождения, помогая системе избегать столкновений и безопасно управлять автомобилем.
4. Управление моделями
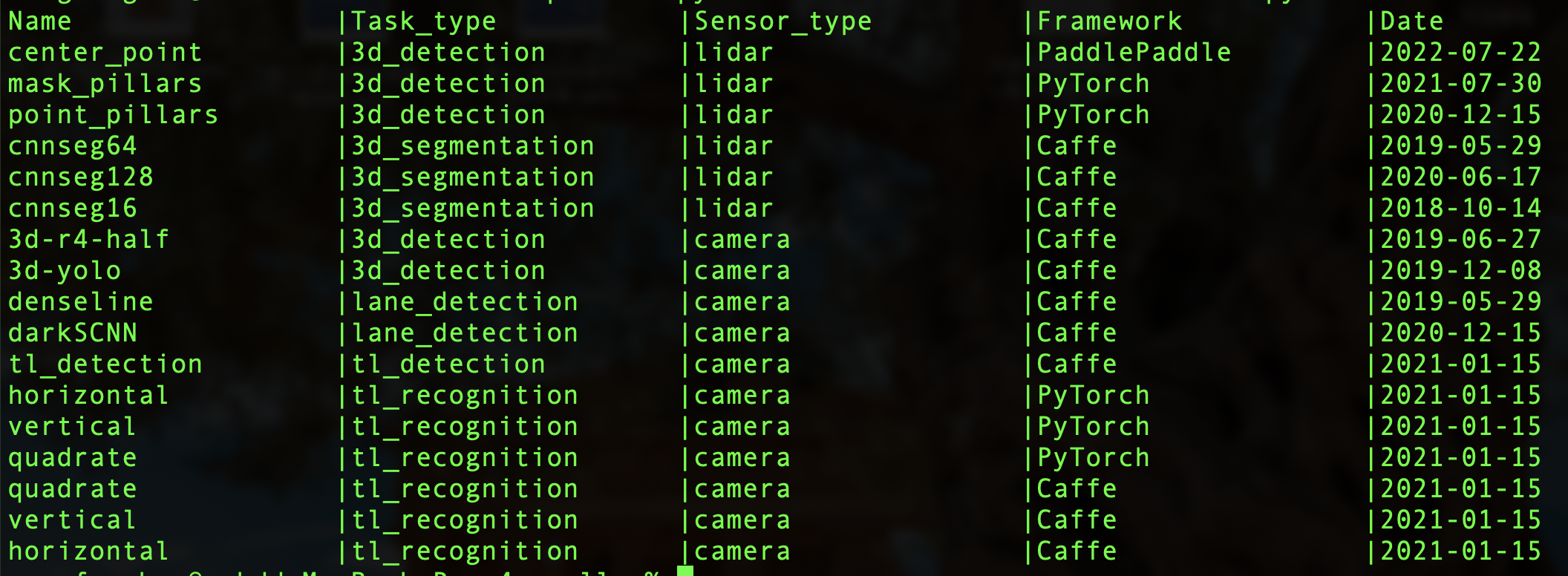
Мета-модель и управление моделями также представлены в Apollo 8.0. Среди них модель Meta содержит основную информацию о модели, такую как имя, тип задачи, тип датчика, структуру и наборы данных, необходимые для обучения. Она также включает стандартный ввод, ввод, предварительную и постобработку модели. , путь для хранения файлов модели и т.д. Стандартизируя модель с помощью этой информации, разработчикам нужно только убедиться, что входные и выходные данные модели согласованы, а затем они могут напрямую заменить модель, чтобы повысить эффективность разработки модели.
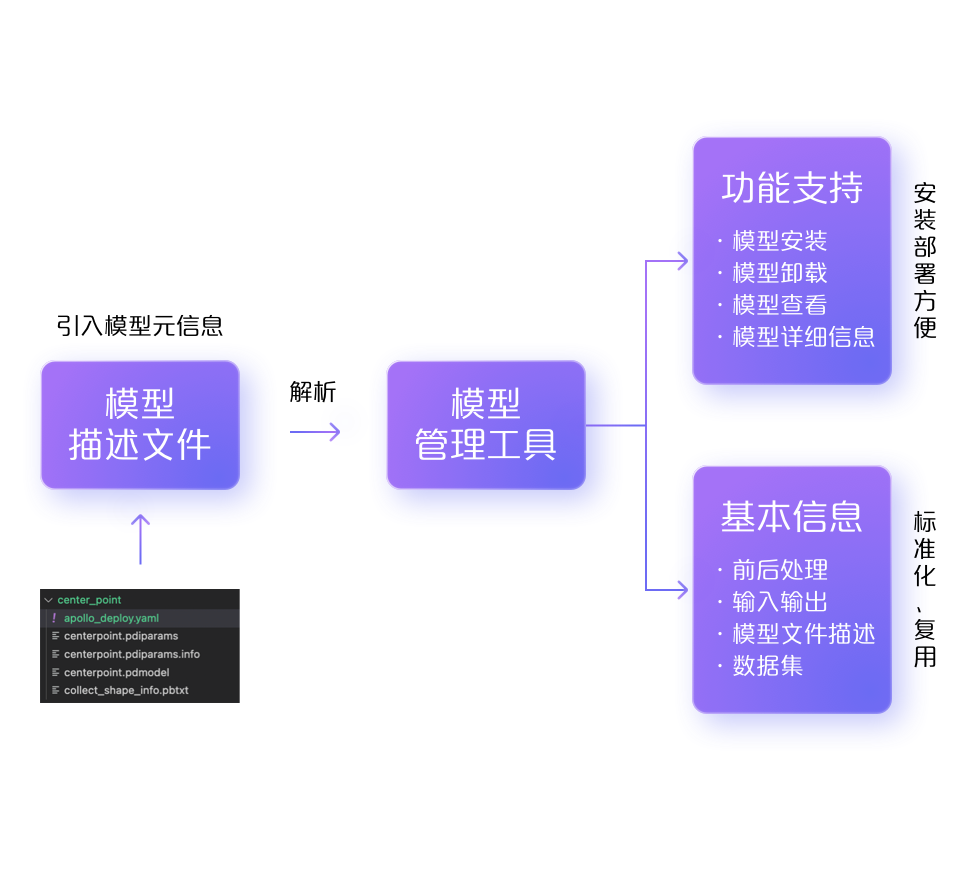
Он также предоставляет инструмент управления моделями, с помощью которого разработчики могут загружать и устанавливать модели в хранилище моделей и отображать модели и сведения о моделях, которые были установлены в системе. И управляйте этими моделями, чтобы повысить эффективность развертывания моделей.
Для конкретных методов использования вы можете проверить официальную документацию.
Заключение
Эффективная работа модуля восприятия является важной гарантией достижения безопасного автономного вождения и обеспечивает необходимую информационную основу для последующих модулей принятия решений и управления. Я надеюсь, что эта статья поможет разработчикам лучше понять и применить функции восприятия платформы Apollo и способствовать постоянному развитию технологий автономного вождения.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
