[Машинное обучение] Автономное вождение — будущее интеллектуального транспорта и беспилотных технологий

Концепция автономного вождения зародилась в 1960-х годах, но настоящий прорыв произошел в начале 2000-х, когда такие компании, как Google и Tesla, начали вкладывать много ресурсов в разработку сопутствующих технологий. Сегодня многие технологические компании и производители автомобилей по всему миру активно работают в этой области, стремясь реализовать будущее без водителя.
1. Основные технологии автономного вождения

Автономное вождение — это сложная системная разработка, основанная на совместной работе множества передовых технологий. Ниже приведены несколько основных технологий для реализации автономного вождения:
1.1 Компьютерное зрение
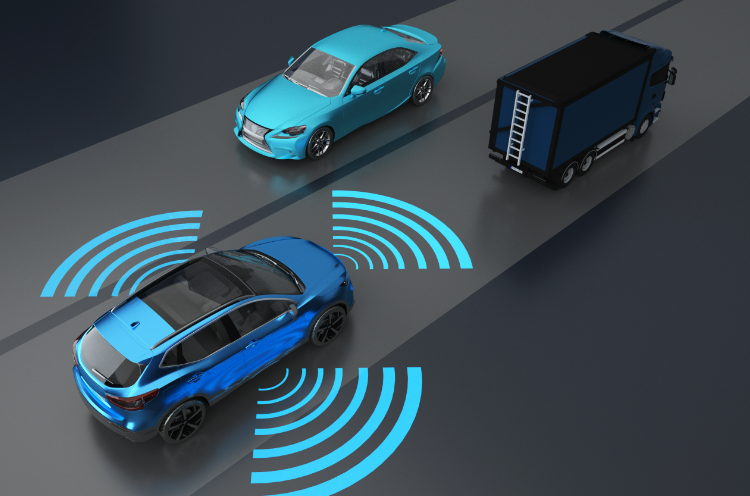
Компьютерное зрение является основой для беспилотных транспортных средств, позволяющих воспринимать окружающую среду. С помощью таких датчиков, как камеры, LiDAR и радар миллиметрового диапазона, транспортные средства могут получать информацию об окружающей среде в режиме реального времени. Машинное обучение, особенно глубокое обучение, значительно улучшило возможности компьютерного зрения, позволяя транспортным средствам распознавать пешеходов, другие транспортные средства, сигналы светофора и препятствия.
# Пример алгоритма YOLO при обнаружении целей
import cv2
import numpy as np
# Загрузите предварительно обученную модель YOLO
net = cv2.dnn.readNet("yolov3.weights", "yolov3.cfg")
layer_names = net.getLayerNames()
output_layers = [layer_names[i[0] - 1] for i in net.getUnconnectedOutLayers()]
# Чтение входного изображения
img = cv2.imread("car_image.jpg")
height, width, channels = img.shape
# Предварительная обработка изображений
blob = cv2.dnn.blobFromImage(img, 0.00392, (416, 416), (0, 0, 0), True, crop=False)
net.setInput(blob)
outs = net.forward(output_layers)
# Извлечь результаты теста
for out in outs:
for detection in out:
scores = detection[5:]
class_id = np.argmax(scores)
confidence = scores[class_id]
if confidence > 0.5:
# Логика обработки обнаружения целей
pass1.2 Глубокое обучение и обучение с подкреплением
Глубокое обучение и обучение с подкреплением являются основой технологии автономного вождения и играют жизненно важную роль в решении сложных задач восприятия и принятия решений.

глубокое обучение Особенно подходит для Автономного вождениевраспознавание образовизадача на восприятие。Автономное Вождение Транспортным средствам необходимо в кратчайшие сроки извлекать информацию из окружающей среды и осуществлять высокоточное распознавание. образов。глубокое обучениеиз Сверточная нейронная сеть (CNN)существовать Автономное вождение Чаще всего используется в полях,Возможность обработки видеопотоков в реальном времени с установленной на автомобиле камеры.,从而识别道路上из行人、дорожный знак、транспортное средства, дорожные условия, ожидание. Эта вычислительная мощность помогает при транспортировке. средствосуществовать复杂из交通环境中作出快速而准确из判断。
- Сверточная нейронная сеть (CNN) 用于静态图像或视频帧из处理。Например,Автомобиль делает снимки дороги с помощью фронтальной камеры.,CNNбудет основано на обученииданныев大量标注图像来识别前方из障碍物、дорожная разметка、дорожный знакждать.
- Рекуррентная нейронная сеть (RNN) Он используется для обработки данных временных рядов.,Помогите транспортным средствам прогнозировать будущие условия дорожного движения. Например,RNN можно использовать для анализа ряда временных рамок.,Прогнозируйте траектории движения других транспортных средств,Обеспечьте безопасное вождение.
Обучение с подкреплением Learning, RL) еще один в Автономном Очень важная технология в вождении, это делает Автономное вождениетранспортное средствопроходитьПостоянное взаимодействие с окружающей средой,Изучите лучшие стратегии принятия решений и действий путем непрерывных проб и ошибок.
Применение обучения с подкреплением не ограничивается изучением статической среды: посредством взаимодействия с виртуальной или реальной средой транспортные средства могут научиться сложному динамическому поведению вождения. Например, транспортные средства могут постепенно научиться избегать препятствий, поддерживать полосу движения и оптимизировать скорость посредством обучения с подкреплением в различных дорожных условиях.
- в обучении с подкреплением,Механизм вознаграждения Это ядро. Транспортные средства будут получать вознаграждение в зависимости от их поведения при вождении (например, избегание столкновений, плавное достижение пункта назначения и т. д.) или же они будут наказываться за нарушения правил дорожного движения (например, выезд за пределы полосы движения, превышение скорости). По мере накопления опыта вождения, алгоритм обучения с подкреплением позволит постепенно оптимизировать стратегию автомобиля,для оптимальных ходовых качеств.
Глубокое обучение с подкреплением (Deep Reinforcement Learning, DRL) Сочетание глубоких нейронных сетей с обучением с подкреплением позволяет обрабатывать сложные, многомерные сенсорные данные и изучать оптимальные решения вождения в динамичных средах. Общие алгоритмы включают DQN (сеть Deep Q) и A3C (актор-критик асинхронного преимущества).
Пример. Процесс обучения с подкреплением алгоритма DQN.
import numpy as np
import gym
# Определить DQN Агент, среда Автономная вождениемоделирование
env = gym.make("CarRacing-v0")
state = env.reset()
done = False
total_reward = 0
while not done:
action = agent.choose_action(state) # Выберите действие вождения
next_state, reward, done, _ = env.step(action)
agent.store_transition(state, action, reward, next_state) # Опыт магазина
agent.learn() # обновить стратегию
state = next_state
total_reward += reward1.3 Слияние датчиков
Автономное вождениетранспортное средство Должен быть доступен круглосуточно、多方位из环境感知能力。чтобы добиться этого,Транспортные средства часто оснащены множеством типов датчиков.,нравитьсяКамера、Лидар、радар миллиметрового диапазона и GPS ждать. Эти датчики отвечают за получение информации об окружающей среде в разных измерениях.
сенсорный синтез Технология объединяет многомерные данные от различных датчиков для формирования точной модели окружающей среды автомобиля. Различные датчики имеют разные диапазоны срабатывания и точность. Например, Камера обеспечивает зрение с высоким разрешением, LiDAR обеспечивает точное измерение расстояния, а радар. миллиметрового станция способна эффективно работать в плохую погоду. Объединив эти данные, машинное обучение模型可以существовать不同из环境条件下(нравиться白天、ночь、Дождь и снег) обеспечивают надежную экологическую осведомленность.
- раннее слияние и позднее слияние дасенсорный Два основных метода синтеза. раннее слияние объединяет данные всех датчиков в один вход, который передается через машинное модель обучения для обработки; Слияние сначала обрабатывает данные каждого датчика независимо, а затем объединяет результаты обработки вместе.
Например,сенсорный синтез может использоваться для объединения информации о пешеходах, распознаваемой камерой, с данными о расстоянии, предоставленными LiDAR.,тем самым более точно определяя расстояние между пешеходами и транспортными средствами,и принять соответствующие решения об избежании.
# сенсорный пример синтеза
camera_data = get_camera_data() # Камераданные
lidar_data = get_lidar_data() # LiDARданные
radar_data = get_radar_data() # радар миллиметрового диапазонаданные
# объединение данных различных датчиков
fused_data = fuse_sensor_data(camera_data, lidar_data, radar_data)1.4 Планирование пути и принятие решений

Планирование маршрута Автономное Одна из основных задач вождения. Автономное вождениетранспортное средство需要существовать复杂из道路网络中计算最优行驶路线,并根据当前из交通状况做出及时из调整。常见из路径规划算法包括Алгоритм А*、Алгоритм Дейкстры и Байесовская сеть ждать.
машинное обучение может быть изучено и выведено на основе исторических данных о трафике и результатов восприятия в реальном времени.,Динамически планируйте безопасный и эффективный маршрут движения. Например,во время езды по городу,Транспортным средствам необходимо учитывать не только кратчайший путь,Также необходимо учитывать такие факторы, как светофоры, пробки на дорогах и строительство дорог.
- дерево решений и алгоритм обучения с подкреплением Он играет важную роль в планировании пути, особенно на сложных интерактивных перекрестках или участках шоссе, где транспортным средствам необходимо принимать эффективные решения с помощью алгоритмов. Например, дереворешения могут принимать разные стратегические решения в зависимости от различных сценариев дорожного движения (например, поворот налево, движение прямо или поворот направо).,А обучение с подкреплением помогает транспортному средствопроходить试错из方式找到最佳из超车或避让策略。
Пример: планирование пути с помощью алгоритма A*
def a_star_search(start, goal, graph):
open_list = set([start])
closed_list = set([])
g = {} # Стоимость от источника до узла
g[start] = 0
parents = {}
parents[start] = start
while len(open_list) > 0:
n = None
for v in open_list:
if n == None or g[v] + heuristic(v, goal) < g[n] + heuristic(n, goal):
n = v
if n == goal:
return reconstruct_path(parents, start, goal)
for neighbor in graph[n]:
if neighbor not in open_list and neighbor not in closed_list:
open_list.add(neighbor)
parents[neighbor] = n
g[neighbor] = g[n] + graph[n][neighbor]
else:
if g[neighbor] > g[n] + graph[n][neighbor]:
g[neighbor] = g[n] + graph[n][neighbor]
parents[neighbor] = n
open_list.remove(n)
closed_list.add(n)2. Машинное обучение в автономном вождении
2.1 Обработка данных и аннотирование
Автономное вождениесистемные зависимостиБольшие объемы реальных дорожных данныхПровести обучение модели。Этиданные Обычно включает в себя множество форм,Например, данные изображения камеры, данные трехмерного облака точек LiDAR, данные позиционирования GPS, чтобы повысить точность модели.,данные обычно требуют предварительной обработки и аннотирования.
- Очистка данных:существовать训练之前,данных необходимо удалить шум и выбросы. Например,Когда датчик собирает данные,Аномалии могут возникнуть из-за погодных условий или неисправности оборудования.,Их необходимо отфильтровать перед тренировкой.
- Аннотация данных:Обучение модели восприятия,данные обычно требуют аннотации вручную,Например, маркировка пешеходов, транспортных средств и дорожной разметки на изображении. Эти аннотации обычно выполняются профессиональной командой.,Убедитесь, что модель может изучить правильную модель восприятия.
2.2 Восприятие окружающей среды и обнаружение целей
Модели машинного обучения, особенно сверточные нейронные сети (CNN), используются для восприятия окружающей среды и обнаружения целей в реальном времени. Транспортные средства должны постоянно обнаруживать пешеходов, транспортные средства и другие препятствия вокруг себя и оперативно реагировать. Модели CNN хорошо умеют извлекать особенности из сложных данных изображений, поэтому они широко используются в системах технического зрения транспортных средств.
2.3 Принятие решений и контроль
Уровень принятия решений в автономном вождении включает в себя сложный выбор действий, например, когда тормозить, ускоряться, поворачивать или обгонять. Глубокое обучение с подкреплением позволяет транспортным средствам безопасно ездить в сложных дорожных условиях, изучая привычки водителя и постоянно оптимизируя стратегии принятия решений в моделируемой среде.
3. Проблемы и будущие тенденции автономного вождения

испытание
- Безопасность и надежность:Автономное вождение Необходимость борьбы со всеми видами экстремальных погодных условий、Сложные дорожные условияичрезвычайные ситуации,нравиться何确保транспортное средствоиз安Полный性и可靠性仍да一个巨大изиспытание。
- Правила и этика:各国из法律法规верно于Автономное Принятие вождения разное. Как сформулировать единые стандарты и решить этические вопросы (например, возложение ответственности за несчастные случаи) являются движущими силами вождения. вождение Важный фактор популяризации технологий.
- Вычислительные ресурсы:Автономное вождениеверно Вычислительные ресурсыиз需求非常高,Особенно восприятие окружающей среды в режиме реального времени и контроль принятия решений. Как сократить затраты на оборудование,Повышение эффективности вычислений,Все-таки техническая трудность.
будущие тенденции
- Популяризация полностью автономного вождения L5:随着技术из发展,Полный Автономное Ожидается, что вождение (L5) получит широкое распространение в течение следующих 10–20 лет.
- Сотрудничество транспортных средств и дорог:Автономное Вождение – это не только интеллект транспортных средств, но и интеллект дорожной инфраструктуры. Интеллектуальный транспорт Сигнал、V2X(Vehicle to Все) технология позволит реализовать взаимосвязь между транспортными средствами, дорогами, пешеходами и дорожными системами в режиме реального времени.
- Глубокая интеграция искусственного интеллекта и автономного вождения:будущее,Искусственный интеллект будет и дальше интегрирован в «Автономное» Каждый аспект вождения, от сбора и восприятия данных до их обработки. решений и контроль, ИИ добьется сквозного Автономного решение вождения.
4. Заключение
Технология автономного вождения находится на стадии быстрого развития, и машинное обучение является основной движущей силой в этой области. В будущем, с развитием технологий искусственного интеллекта, совершенствованием вычислительных мощностей, а также совершенствованием законов и правил, автономное вождение постепенно станет более зрелым и полностью изменит способ нашего путешествия.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
