Ключ к оптимизации системы управления движением | Оптимизация контура тока, контура скорости и контура положения
Ключ к оптимизации контроллера заключается в следующих аспектах.
(1) Динамические характеристики
Мера динамических характеристик– ширина полосы АЧХ и время динамического отклика на ступенчатый сигнал,Как показано ниже.
Динамические характеристики системы можно улучшить, используя более короткий период выборки и более высокий пропорциональный коэффициент усиления контроллера.
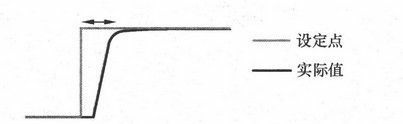
Переходная характеристика системы (1)
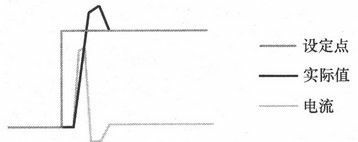
(2) Стабильность
Об устойчивости системы можно судить по запасу амплитуды и фазового угла характеристик разомкнутого контура, а о стабильности системы также можно судить по размеру перерегулирования, как показано на рисунке ниже.
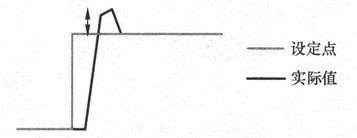
Переходная характеристика системы (2)
Небольшой пропорциональный коэффициент усиления регулятора способствует повышению устойчивости системы. Видно, что динамические характеристики и устойчивость системы противоречат друг другу. В процессе отладки динамические характеристики системы должны быть максимально улучшены при сохранении стабильности системы.
(3) Точность
Точность может быть повышена за счет низкочастотного высокого пропорционального усиления характеристик разомкнутого контура. Чем меньше статическая ошибка и ошибка рассогласования системы, тем выше точность, как показано на рисунке ниже.
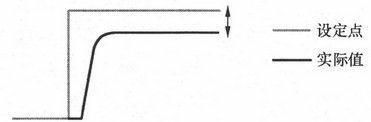
Переходная характеристика системы (3)
Интеграл контроллера можно использовать для устранения статической ошибки системы. При этом чем больше пропорциональный коэффициент усиления, тем выше точность.
(4) Надежность системы
Надежность означает способность системы сохранять стабильность и динамические характеристики при изменении условий эксплуатации, как показано на рисунке ниже. К ним относятся:
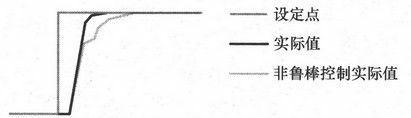
Переходная характеристика системы (4)
①Изменения механических свойств;
② Изменения характеристик двигателя из-за температуры и т. д.
На надежность системы влияет множество факторов, таких как выходные возможности драйвера и стабильность системы.
(5) Ограничения управляющего сигнала
Из-за ограничений выходных возможностей двигателя и драйвера необходимо учитывать ограничения управляющего сигнала, как показано на рисунке ниже. Например, при настройке ускорения нагрузки необходимо учитывать, не превысил ли ускоряющий момент возможности водителя или двигателя.
Переходная характеристика системы (5)
(6) Защита от помех и шума
① Низкочастотные помехи вызваны перекрестной связью или трением. Существует два основных решения:
- Низкая частота и высокий пропорциональный коэффициент усиления;
- Интегратор и фильтр.
② Высокочастотный шум вызван моторным и механическим резонансом. Существует два основных решения:
- Высокая частота и низкий коэффициент усиления;
- фильтр.

Оптимизация контура тока, контура скорости и контура положения
Обычно сервосистема состоит из токового контура, контура скорости и контура положения. Эти три замкнутых контура являются взаимовключающими изнутри наружу. То есть контур скорости содержит контур тока, а контур положения содержит контур скорости. В редких случаях встречаются только петли положения и петли тока, но только в специальных приложениях. Типичный трехконтурный контур управления показан на рисунке ниже.
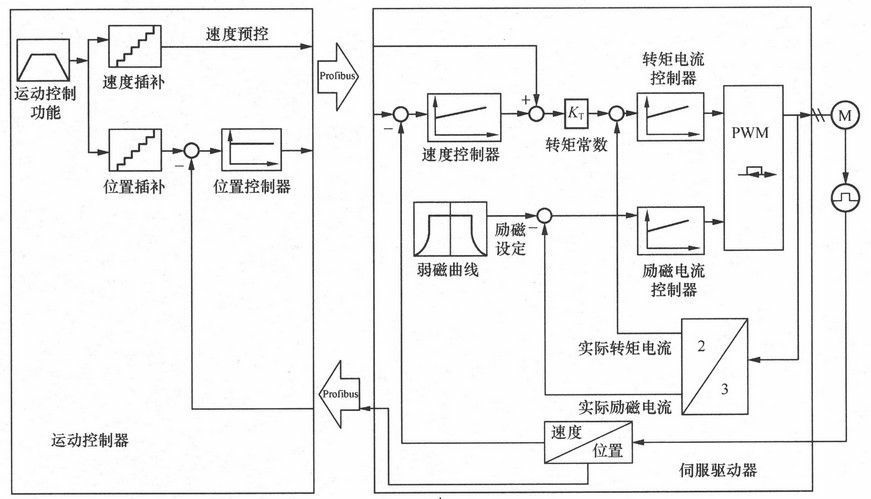
Трехконтурный контур управления
В процессе оптимизации рекомендуется следовать порядку изнутри наружу, то есть сначала оптимизировать контур тока, затем оптимизировать контур скорости и, наконец, настроить параметры контура положения. В сервоприводе параметры регулятора тока определяются на основе параметров двигателя, включая номинальный ток и константу крутящего момента двигателя. В канале обратной связи регулятора тока используется модель двигателя, включающая такие параметры, как индуктивное реактивное сопротивление и полное сопротивление двигателя. Поэтому точность параметров двигателя оказывает важное влияние на параметры токовой петли.
При использовании SinamicsS120 для управления двигателем Siemens вам нужно только проверить серийный номер двигателя, и параметры контроллера тока автоматически установятся по умолчанию. Если вы используете S120 для привода стороннего двигателя, вам необходимо тщательно проверить каждый параметр двигателя и провести статическую идентификацию двигателя. Для измерения характеристик токового контура об этом можно судить по диаграмме Боде. Обычно требуемая полоса пропускания токового контура составляет около 1000 Гц. Следует отметить, что характеристики токового контура не настолько жесткие, насколько это возможно, поскольку на внешнем слое токового контура имеется контур регулирования скорости. При условии точной регулировки выхода регулятора скорости, отличные характеристики токового контура. приведет к нестабильности системы.
Во время использования контроллером, требующим энергичной настройки, является регулятор скорости. На основе настройки токового контура пропорциональный коэффициент усиления и время интегрирования контура скорости являются наиболее важными параметрами настройки и наиболее часто используемыми параметрами. В соответствии со стандартами и методами оптимизации контроллера регулятор скорости можно настроить. Принцип настройки заключается в доведении динамических характеристик до максимального уровня при обеспечении стабильности системы. Некоторые высокопроизводительные сервоприводы предоставляют пользователям функцию автоматической оптимизации. В процессе автоматической оптимизации необходимо измерить инерцию двигателя и нагрузку, определить параметры токового контура и, наконец, предоставить оптимизированные параметры регулятора скорости. Однако из-за полного учета стабильности системы результаты автоматической оптимизации представляют собой относительно консервативные параметры, поэтому пользователи могут вручную корректировать параметры контроллера на основе автоматической оптимизации. Эталонной основой является график Боде или переходный процесс системы. В нормальных условиях необходимо обеспечить, чтобы полоса пропускания контура скорости находилась в пределах от 100 до 200 Гц.
После оптимизации контура тока и контура скорости можно вращать двигатель с определенной частотой, чтобы проверить плавность его работы. Последний шаг – настройка регулятора положения. Для регуляторов положения в большинстве случаев система по умолчанию использует пропорциональное управление без интегральных и дифференциальных связей. Для пропорционального усиления рекомендуется постепенно регулировать его от меньшего значения к большему, пока не будут выполнены требования к точности позиционирования системы.
ref:
[1] Проект сервосистемы и системы управления движением / под редакцией Тянь Ю. Пекин: People's Posts and Telecommunication Press, 2010.5.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
