Извлечение целевых объектов городских дорог и трехмерная реконструкция на основе данных облака точек, установленных на транспортных средствах.
Цифровое моделирование городских дорог, являясь важной частью транспортной инфраструктуры, является необходимой предпосылкой для развития умного транспорта, автономного вождения и мониторинга деформации инфраструктуры [1]. Хотя дорожное строительство в развитых странах достигло относительно насыщенного состояния, быстрая и точная реконструкция существующих дорог с использованием цифровых моделей по-прежнему находится в центре внимания исследований. В связи с этим технология трехмерного лазерного сканирования собирает данные облака точек области, подлежащей измерению, с помощью лидарной системы, а затем становится важным средством достижения высокоточной реконструкции [2].
Однако большинство существующих методов исследования имеют некоторые ограничения, такие как высокая степень ручного участия, низкая эффективность обработки и оптимизация только для определенных типов сценариев. Эти факторы препятствовали повышению универсальности и точности системы.
Для извлечения особенностей дорог и трехмерной реконструкции было предложено множество методов, таких как методы, основанные на технологии обработки изображений, традиционные методы компьютерного проектирования (САПР), методы моделирования чертежных данных, а также появившиеся в последние годы методы лазерного сканирования и трехмерного моделирования. методы данных наклонного изображения [3], но эти методы часто имеют свои проблемы и проблемы. Например, традиционные методы часто требуют больших трудовых, материальных ресурсов и временных затрат при обработке сложных сценариев и больших объемов данных [4]. В последние годы развитие технологии наклонной фотографии привело к появлению методов реконструкции трехмерных моделей, основанных на данных наклонного изображения. Хотя этот метод может повысить эффективность реконструкции модели в некоторых сценариях, таких как окклюзия или система глобального позиционирования. система позиционирования, GPS) сигнал теряется, эффект от этого метода серьезно пострадает [5-7].
Хотя методы, основанные на технологии 3D-лазерного сканирования, могут сохранять больше деталей, существуют большие проблемы при обработке и интерпретации данных облака точек [8-9], особенно когда объем данных велик и их сложность высока.
Что касается выделения границ дороги, Ху и др. [10] извлекли облако точек земли с помощью тканевой фильтрации, а затем выбрали несколько точек дороги перед транспортным средством, чтобы оценить вектор нормали модели дороги. Распределение плотности облака точек дороги, одномерная сумма непрерывности плотности точек в 2D, исходя из концентраций плоских точек. Отфильтруйте все точки дороги и, наконец, извлеките облако точек границ дороги; Ван и др. [11] помогли разделить дорогу, построить характерную карту и извлечь характерные точки, обнаружить подавитель и извлечь самую низкую точку подавителя, а также установить границу дороги по траекториям транспортных средств. другие шаги по выделению и согласованию границ городских дорог. Этот метод заменяет трехмерное облако точек обработкой двумерных изображений. Однако существует множество типов облаков точек дороги, и во время проецирования они накладываются друг на друга, что приводит к потере изображения. Кроме того, выбор размера сетки двумерного изображения также влияет на точность результатов извлечения облака. Некоторые ученые обрабатывают данные облака точек дороги на основе линий сканирования и извлекают границы дороги. Чжан и др. [12] разложили данные о расстоянии на сигналы высоты и сигналы проекции земли на основе каждой линии сканирования, отфильтровали сигналы высоты, а затем использовали технологию распознавания образов, чтобы определить, было ли это дорожное покрытие, и проверили это с помощью проекции. сигнал Фанг Лина [13] выполнил фильтрацию высот на основе каждой линии сканирования, извлек облака точек дороги и неровности дороги и, наконец, получил границу дороги; Вышеописанный метод обработки данных облака точек на основе линий сканирования учитывает и использует информацию о пространственном распределении наземных объектов, но не учитывает непрерывную взаимосвязь между линиями сканирования, а определение некоторых пороговых значений в основном основано на опыте и имеет плохие результаты. адаптивность, ее сложно применить, когда сцена сложная.
Некоторые исследователи также провели соответствующие исследования по методу извлечения линий дорожной разметки. Ян и др. [14] создали географически привязанные изображения объектов посредством интерполяции, разделили их в соответствии с интенсивностью отражения, а затем использовали пороговые значения высоты для сегментации разделенных точек. Наконец, они использовали семантическую информацию о дорожной разметке для извлечения линий дорожной разметки. , более сложный трафик. Точность идентификационных линий при извлечении низкая. Йе и др. [15] сегментировали данные облака точек дороги на блоки, перпендикулярные траектории транспортного средства, и использовали метод двойного адаптивного порога интенсивности; Дорожная разметка извлекается из поверхности дороги, и, наконец, выполняется адаптивная пространственная фильтрация плотности на основе распределения плотности данных облака точек для удаления ложных точек дорожных знаков. Ван и др. [16] извлекли и сегментировали облака точек дорожной поверхности и вспомогательных объектов; из исходного облака точек на основе траекторий GPS. Динамический перенос облаков точек из глобальной системы координат в локальную систему координат на основе блоков, оценка краевых и центральных точек на основе контуров блоков и преобразованных облаков точек, а также извлечение дорожной разметки на основе фильтров радиуса. Хотя этот метод позволяет извлечь трехмерную информацию о дорожной разметке, он неэффективен при извлечении дорожной разметки с низкой интенсивностью отражения.
В настоящее время для извлечения придорожных целей используются методы пространственной кластеризации. Чжэнь и др. [17] и Ли Юнцян и др. [18] сначала кластеризовали данные облака точек дороги, чтобы получить каждый кластер точек, рассчитали характеристики кластера точек, создали обучающий набор и классифицировали каждый кластер точек с помощью классификатора. Этот метод позволяет получить лучшие результаты извлечения объектов с относительно большими различиями в характеристиках, но для стержнеобразных объектов на обочине дороги различия невелики, их трудно различить, а эффект относительно слабый. Ю и др. [19] вручную извлекли уличные фонари из данных облака точек дороги, создали шаблон уличного освещения и использовали этот шаблон для постоянного сопоставления данных облака точек дороги. Если степень соответствия высока, она будет определена как улица. облако светлых точек.
Целью этого исследования является восполнение недостатков существующих исследований в области обработки сложных сред и больших объемов данных, устранение ограничений современных методов извлечения объектов городских дорог и методов трехмерной реконструкции при работе со сложными сценами и большими объемами данных, а также предоставление более эффективное, более надежное решение.
01 Метод выделения целевых объектов дороги и трехмерной реконструкции на основе данных облака точек транспортного средства
1.1 Извлечение целевых объектов дороги
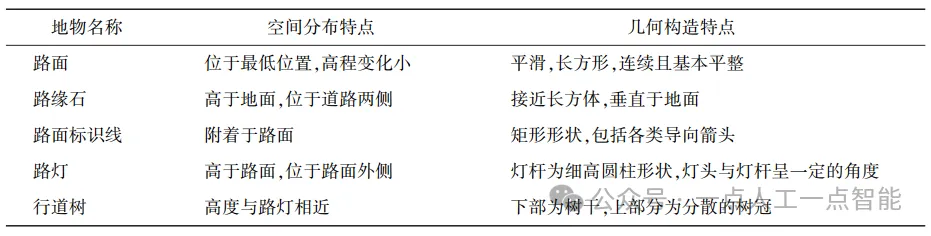
Данные об облаке точек дорог транспортных средств в основном включают в себя следующие объекты: тротуар, бордюры, дорожную разметку, дорожные знаки, уличные фонари, уличные деревья, центральные изолирующие ограждения и здания и т. д. На основе литературы [20] Характеристики пространственного распределения и Были проанализированы характеристики геометрической структуры, результаты представлены в таблице 1.
1.1.1 Метод выделения облака точек на границе дороги
В составе городских дорог бордюры являются необходимым компонентом. Поэтому на основе анализа характеристик бордюров предлагается оператор описания бордюра, извлекающий облако точек вблизи бордюров и далее выделяющий границу дороги через подгонку плоскости. алгоритм.
Посредством фильтрации высот из данных облака точек дороги удаляются точки, значение высоты которых более чем на 50 см превышает значение отметки точки дороги.,Сохраняются только облака точек, такие как тротуар, бордюры и низкая растительность.,Избегайте влияния слишком высоких наземных объектов на результаты из-за окклюзии. Спроецируйте данные облака точек вниз на плоскость XOY и создайте регулярную сетку.
Анализируя пространственное распределение бордюров, мы обнаружили, что бордюры обладают двумя основными характеристиками: 1) В поперечном направлении дороги бордюры имеют одностороннюю непрерывность, то есть одна сторона бордюра представляет собой сплошное и ровное дорожное покрытие. , а другая сторона заполнена цветами, травой, уличными деревьями и другими случайными объектами. 2) По направлению движения автомобиля бордюры равномерно распределяются, то есть по мере продвижения дороги вперед бордюры также продолжаются непрерывно; направление движения автомобиля, как показано на рисунке 1 показано. картина 1середина,а) схематическое изображение дороги,(b)да(a)серединаA~Fувеличенный вид части,Красная часть — бордюрный камень.,Зеленые части представляют собой кустарники.,Черная часть представляет собой дорожное покрытие.
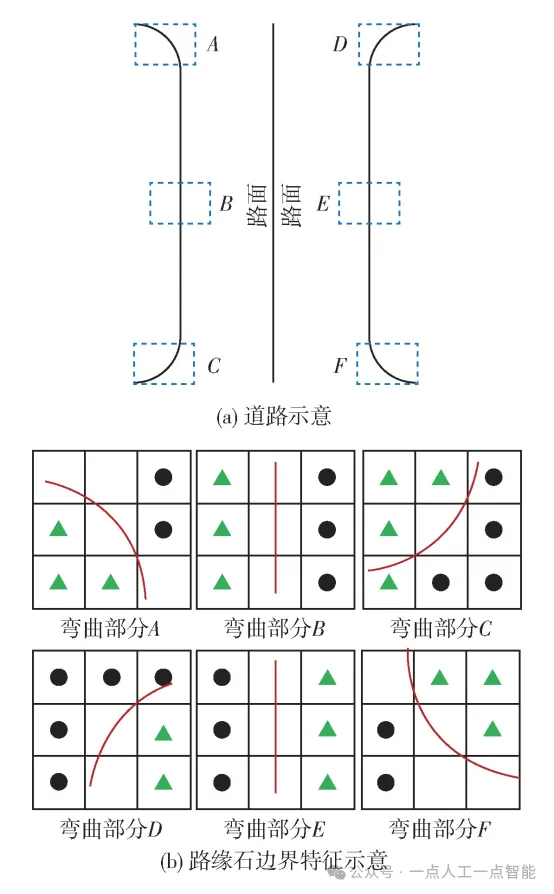
На основе односторонней непрерывности и непрерывного распределения определен оператор описания бордюра, включающий два дискриминантных условия. Облако точек на основе сетки использует движущееся окно дискриминации 3×3 для проверки и распознавания данных облака точек. Если сетка облака точек соответствует условию дискриминации A и условию дискриминации B, определяется, что сетка представляет собой сетку из бордюрного камня. ., в противном случае она рассматривается как сетка без бордюров. Чтобы облегчить описание и расчет, пусть максимальная высота всех точек в сетке облака точек равна значению сетки.
1) Условие принятия решения А:середина心格网与邻域格网的高程差值\delta h должно быть от 10 до 25 см максимальное количество N сеток окрестностей, соответствующих этой характеристике, должно находиться между N_1 и N_2, N_1=2, N_2=4.
2) Условие принятия решения B:计算середина心格网与邻域格网的坡度,Если наклон меньше порога\delat s, затем отметьте сетку окрестностей; максимальный угол \alpha_{max} между всеми векторами, составленными из центральной точки рассчитанной центральной сетки и отмеченной центральной точки окрестной сетки, должен быть равен 135° или 180°.
После определения условия оценки A и условия оценки B вы можете использовать перемещающееся окно оценки 3 × 3 для оценки одного за другим. Если оба условия соблюдены, это можно оценить как сетку бордюрного камня.
Для удаления псевдограничных сеток, таких как центральные дорожные ограждения и растительность на клумбах, в качестве стартовой сетки используется сетка бордюрного камня, а в качестве условий кластеризации используется количество и угол наклона соседних сеток. для кластеризации и получается определенная дорога.
В пределах определенной сетки бордюров используется метод согласованности случайной выборки для подбора фасада бордюра и плоскости покрытия соответственно, а затем находится пересечение двух плоскостей. Это пересечение является облаком граничных точек дороги.
1.1.2 Выделение линии дорожной разметки
Отфильтруйте данные облака точек дороги и разделите облако точек на наземные и неназемные точки, чтобы избежать помех неназемных точек, таких как автомобили, уличные деревья, уличные фонари и т. д., при обнаружении наземных элементов, чтобы лучше обнаруживать неземные объекты дороги (например, уличные деревья, уличные фонари).
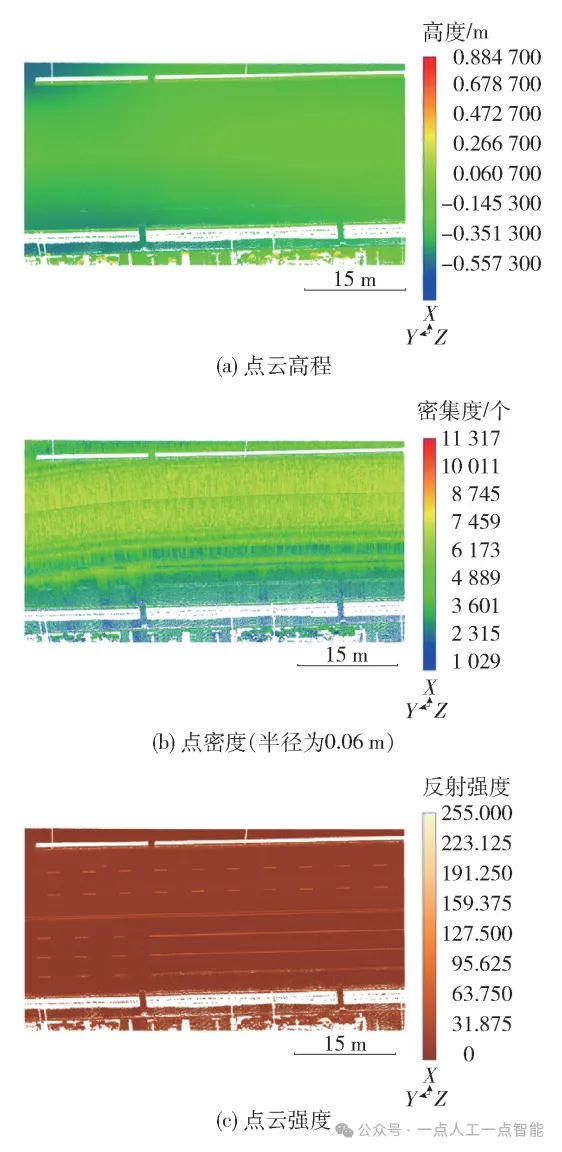
Комплексное использование информации о высоте из данных облака точек.、информация об интенсивности、Информация о плотности облака точек генерирует три типа изображений в оттенках серого с географической привязкой: изображение высот неназемных точек.、Изображение интенсивности точек земли и изображение плотности точек точки земли。高程图像的格网灰度值да通过计算格网内非地面点的平均Zстоимость определена,Значение серого цвета сетки изображения интенсивности определяется путем расчета средней интенсивности отражения точек земли внутри сетки.,Значение серого цвета сетки изображения плотности точек определяется путем подсчета количества наземных точек, попадающих в сетку.,Три изображения показаны на рисунке 2.
Обработайте изображение высоты и изображение интенсивности, чтобы получить изображение градиента высоты и изображение градиента интенсивности, выполните обработку бинаризации изображения градиента высоты и изображения плотности точек и грубо извлеките пиксели разметочной линии на основе изображения градиента интенсивности. изображение, используйте изображение двоичного значения наклона и двоичное изображение плотности точек, чтобы отфильтровать его, и удалите наклон в двоичном изображении уклона. Распределение меньшей плотности точек в более крупных и плотных двоичных изображениях сохраняет части с небольшими наклонами и высокой плотностью точек. Метод максимального порога энтропии используется для бинаризации отфильтрованного изображения с градиентом интенсивности и грубого разделения пикселей со значением 1. В качестве граничных пикселей линий дорожной разметки используются точки, а для заполнения выделенных границ замкнутых линий дорожной разметки используется алгоритм увеличения области.
Наконец, изображение с географической привязкой сопоставляется обратно с исходным трехмерным пространством, а метод максимальной межклассовой дисперсии используется для фильтрации порога интенсивности облака точек, сохраняя точки с более высокими значениями интенсивности для уточнения дорожной разметки и удаления эффект сглаживания изображения с географической привязкой. Для уменьшения шумовых точек на изображении используется метод последовательной релаксации (последовательная сверхрелаксация, SOR) для удаления аномальных точек и шумовых точек.
1.1.3 Извлечение уличных фонарей и уличных деревьев
Поскольку уличные фонари и уличные деревья представляют собой не наземные облака точек, метод тканевой фильтрации используется для фильтрации облаков точек, удаления наземных облаков точек и сохранения не наземных облаков точек.
В евклидову кластеризацию вводится параметр гладкости, а кластерная сегментация наземных объектов осуществляется с помощью усовершенствованного метода евклидовой кластеризации с учетом фактической высоты уличных фонарей и уличных деревьев, если расстояние от самой высокой точки кластера до высоты. земля менее 6 м, будет отфильтрована и удалена.
Установите индекс трехмерной сетки для оставшихся кластерных облаков точек и выполните плоскую проекцию на каждом слое облаков точек сетки. После того, как объекты в форме стержня проецируются на плоскость XOY, они приобретают форму дуги. используется для расчета сетки. Данные облака точек с сеткой вычисляют радиус и координаты центра подходящего круга внутри каждой сетки снизу вверх. Чтобы предотвратить смешивание в кластере элементов, не относящихся к уличным фонарям и столбам уличных деревьев, к нему необходимо добавить два ограничения. Одно из них заключается в том, что радиус r подобранного круга должен находиться в пределах определенного. порог, а другой - принять во внимание. Высота двух слоев должна быть такой, чтобы количество слоев сетки, удовлетворяющих радиусу r подгоночного круга, было больше 8. Если эти два условия выполняются, их можно классифицировать как уличные фонари и уличные столбы для деревьев.
Наконец, алгоритм машины опорных векторов используется для классификации облаков точек уличных фонарей и уличных деревьев.
1.2 3D реконструкция дороги
1.2.1 Реконструкция дорожного покрытия
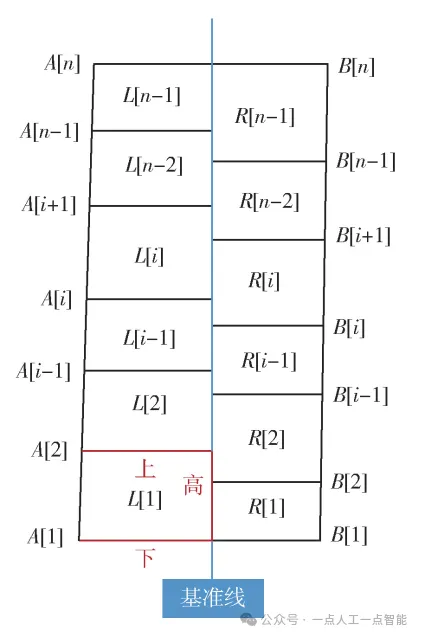
В предыдущей статье облако точек границы дороги было успешно извлечено во время выделения границы дороги. Прежде чем создавать трехмерную модель дороги, необходимо получить параметры поверхности дороги и выполнить обработку прореживания в точке линии границы дороги. облако каждые 10. mСохраняйте ключевые узлы,И извлеките координаты XYZ ключевых узлов.,и хранится отдельно вA[n]иB[n]数组середина,Две соседние точки определяют семейство покрытия.,использоватьL[n]иB[n]выражать,Затем рассчитайте параметры шаблона четырехугольника дороги.,Здесь принят алгоритм непрерывной четырехсторонней реконструкции.,Модели дорожного покрытия можно создавать путем непрерывной загрузки семейств дорожного покрытия и изменения параметров семейства.,как показано на рисунке 3.
При этом следует учитывать, что при проектировании и строительстве дорог неизбежно будут возникать криволинейные участки, причем эти криволинейные участки могут быть неровными. Поэтому при реконструкции дорожного покрытия на криволинейном участке расстояние между шпонками необходимо учитывать. точки на граничной линии необходимо уменьшить, завершить моделирование области кривой, уменьшив расстояние и зашифровав процесс.
1.2.2 Реконструкция опознавательных линий
Дорожное покрытие и линии разметки имеют топологическую связь включения и включения. После завершения реконструкции дорожной одежды реконструируются линии разметки дорожного покрытия, в том числе длинные линии разметки, короткие линии разметки, направляющие стрелки и т. д.
Как длинные, так и короткие линии дорожной разметки имеют прямоугольную структуру на основе ранее извлеченного облака точек линии дорожной разметки, граничные точки облака точек линии дорожной разметки извлекаются с помощью алгоритма классификации K-ближайшего соседа (KNN), а затем. Извлекаются граничные точки облака точек линии дорожной разметки Путем суммирования граничных линий линий дорожной разметки и получения точек пересечения линий дорожной разметки путем подгонки прямых линий можно получить информацию о длине и ширине прямоугольника. Затем, используя информацию о координатах угловых точек, можно рассчитать длину и ширину. Короткие линии разметки плавно наносились на поверхность дороги.
Типы направляющих стрел относительно сложны и могут быть разделены на прямые, левый поворот, правый поворот, прямой и левый поворот, прямой и правый поворот и т. д. При создании шаблона следует полностью учитывать различные типы условий, а также В то же время, ознакомившись с национальными стандартами, было обнаружено, что существуют четкие правила относительно размера стрелок. При создании шаблона стрелки размера можно создавать одну за другой и напрямую извлекать при перестроении идентификационной линии. Нет. необходимо их редактировать. Координаты кончика стрелки можно использовать для плавной загрузки стрелок наведения.
1.2.3 Реконструкция уличных фонарей и уличных деревьев
В обычных обстоятельствах типы уличных фонарей на одной и той же дороге одинаковы, поэтому отдельные уличные фонари тщательно моделируются вручную, а затем для реконструкции дорожных фонарей используется метод пакетного быстрого считывания на основе положения и ориентации. значительно сокращает требуемое время и повышает скорость моделирования.
По разным причинам, таким как разная скорость роста деревьев, разные размеры и формы крон деревьев и т. д., сложно сопоставить каждое дерево с моделью дороги. Поэтому для повышения эффективности моделирования необходимо учитывать статистику типов. создаются уличные деревья на дороге. Получается соответствующая модель, и различные типы моделей одиночных деревьев повторно используются в соответствии со значением центральной координаты ствола дерева для завершения реконструкции уличных деревьев.
02 эксперимент
2.1 экспериментданные
В этом исследовании используется мобильная система трехмерного лазерного контроля дорог VSurs-E производства Qingdao Xiushan Mobile Survey Co., Ltd., как показано на рисунке 4. Измерительная система представляет собой трехмерную пространственную систему измерения, состоящую из автомобильной монтажной платформы, системы сбора данных, системы позиционирования автомобиля и системы синхронизации времени для координации датчиков.

Система гибка в эксплуатации и имеет высокую степень системной интеграции. Она может обеспечить быстрый и эффективный сбор данных. Ее можно использовать в таких областях, как проверка дорожных заболеваний, высокоточные измерения на дорогах и цифровые измерения «умных» городов. Точность сбора может достигать уровня сантиметра. Это исследовательское приложение Эта система собирает данные на участке дороги длиной 1,5 км в городе Циндао. Собранные данные облака точек показаны на рисунке 5.

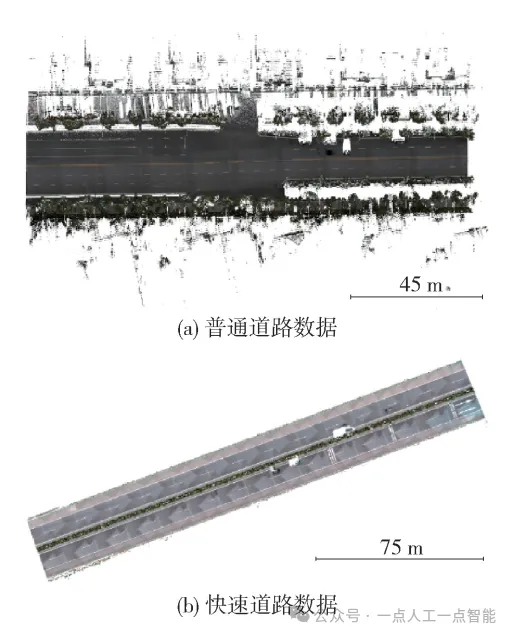
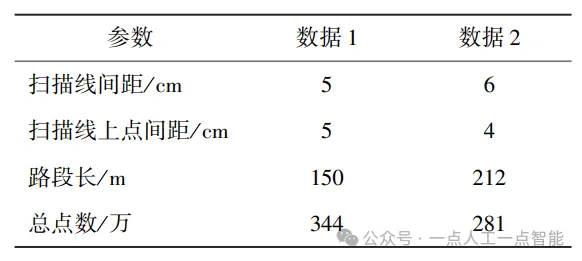
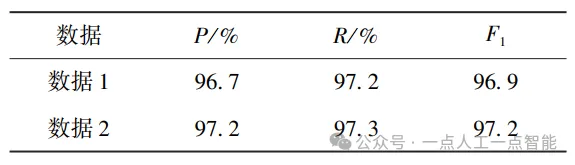
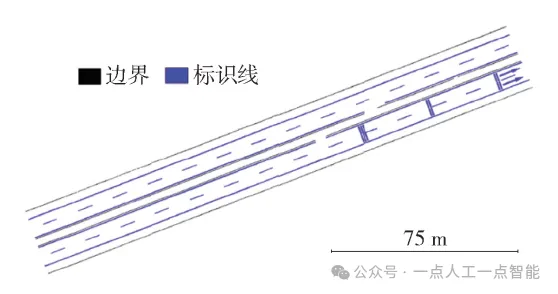
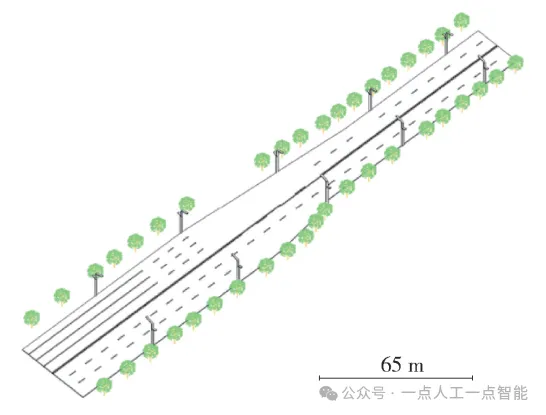
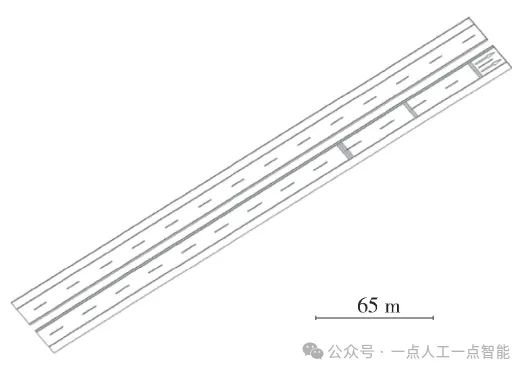
За исключением этой части данных облака точек,В качестве объекта эксперимента также используется другой набор данных.,В этой статье они называются данными 1 и данными 2 соответственно. Между двумя наборами данных существует большая разница.,Данные 1 представляют собой данные облака точек обычной городской дороги.,По обе стороны дороги есть фасады зданий.,Данные более сложны; Данные 2 также получены из дорожных данных, собранных мобильной измерительной системой, установленной на автомобиле Шаньдунского университета науки и технологий.,Объектом сбора являются данные скоростной автомагистрали.,Дорога разделена средней полосой,уличный по обеим сторонам дороги не собран фонарьи行道树点云。данные1、Исходное облако точек из 2 показано на рисунке. Как показано на рисунке 6, некоторые параметры данных облака точек показаны в таблице. 2 показано.
2.2 Показатели оценки
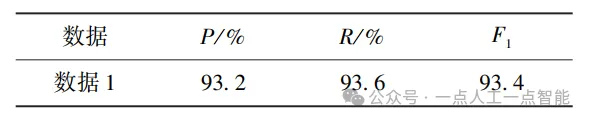
После завершения эксперимента по извлечению дорожной цели,分别статистика以下данные:1)Количество правильно извлеченных целевых характерных точекx_t;2)Количество извлеченных недостающих целевых характерных точекx_n;3)Количество неправильно извлеченных целевых характерных точекx_f。статистикаx_t、x_n、x_fпосле значения,Чтобы оценить точность выделения дорожных целей,本文选择了目前目标提取与识别середина应использовать比较广泛的客观Индекс оценки ТочностьP、ОтзыватьRи综合Индекс оценкиF_1,Формулы расчета соответственно

2.3 Эксперимент по извлечению объектов из дороги
Исходные данные представляют собой неупорядоченные данные облака точек дороги.,Правильные границы дорог, дорожная разметка, уличные фонари и облака точек дерева улиц не предоставляются.,Следовательно, не существует правильного результата, который можно было бы использовать в качестве критерия оценки эксперимента.,Прежде чем использовать алгоритм для извлечения дорожных целейэксперимент,Во-первых, ручные методы используются для извлечения целевых объектов из двух наборов данных облака точек.,как правильный результат,для последующего сравнительного анализа.
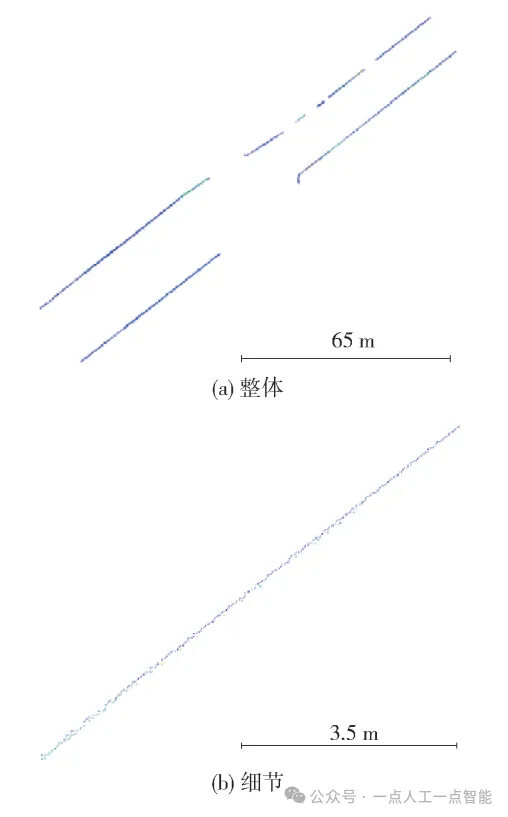
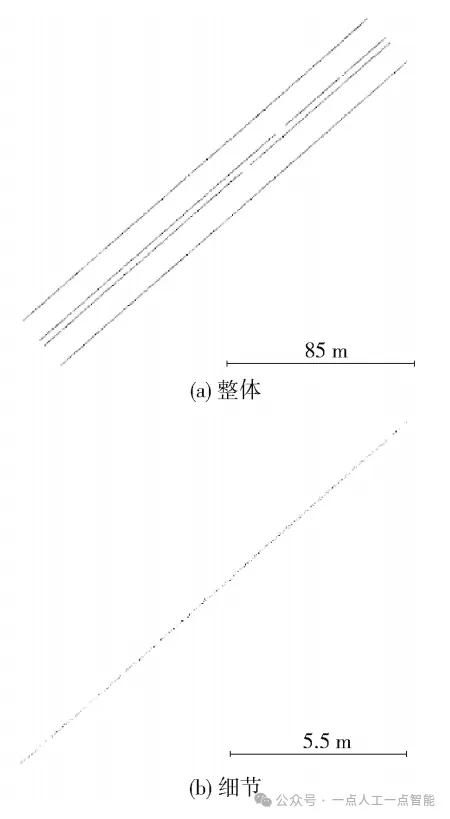
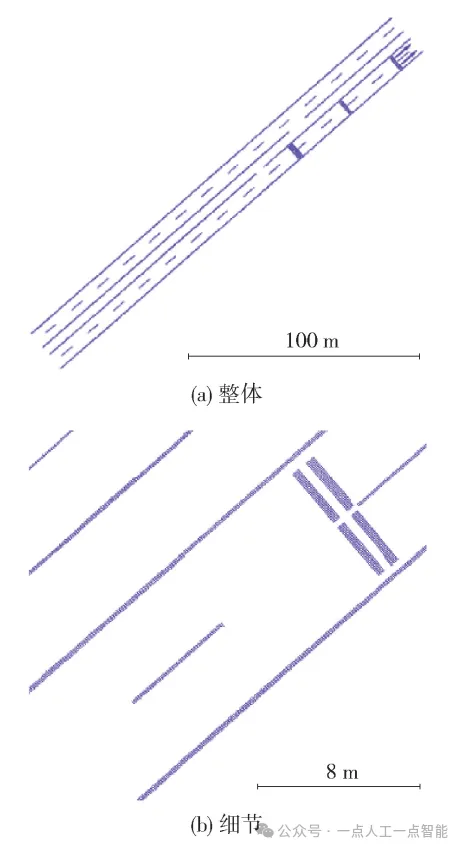
Извлеките границы дорог из данных 1 и 2. В то же время, чтобы более точно отобразить эффект извлечения, некоторые границы увеличены для облегчения наблюдения, как показано на рисунках 7 и 8. Из рисунка видно, что извлечение Влияние границ дорог относительно хорошее, но также будут наблюдаться спорадические места с шумом.
Проанализируйте результаты данных и получите таблицу 3, 4. Из таблицы видно, что алгоритм в этой статье может достичь лучших результатов по уровню точности, скорости отзыва и комплексному индексу двух наборов данных. оценки Все превышено96%。其середина在данные1середина,Из-за небольшой высоты бордюров по обе стороны дороги,Транспортные средства, припаркованные на обочине, создали помеху,В результате по краям появляются шумовые точки.,Это, в свою очередь, приводит к снижению точности. Но в целом алгоритм по-прежнему дает относительно хорошие результаты.,Он имеет хорошее соответствие с граничными линиями, выделенными вручную.
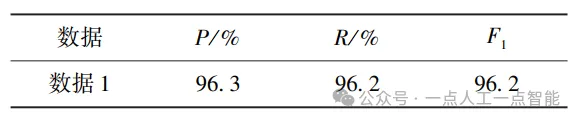
Автоматическое извлечение линий идентификации из облаков точек дороги. Результаты показаны на рисунках 9 и 10. Часть увеличена, чтобы увидеть эффект извлечения. Из рисунка видно, что шум на краях линий идентификации дороги в основном влияет. не существует. Эффект извлечения хороший.
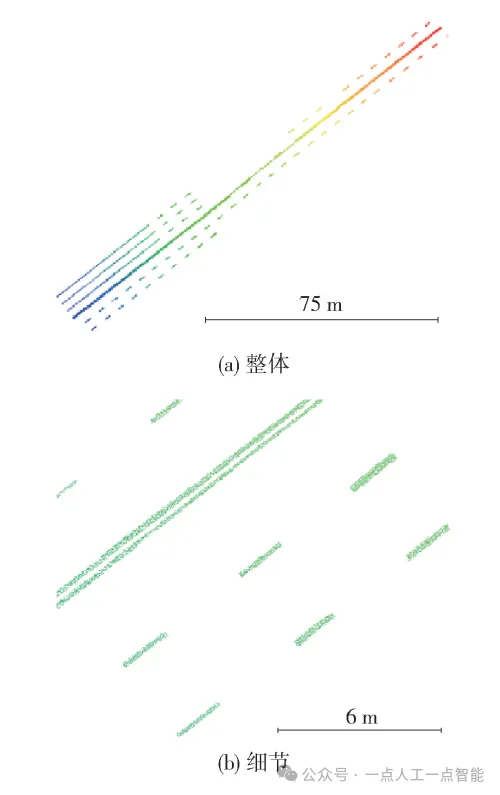
В целом точность оценки двух наборов данных превысила 96%, что указывает на то, что алгоритм может достичь более точного эффекта извлечения линий дорожной разметки.
Данные 1 были автоматически извлечены из уличных фонарей и уличных деревьев, результаты показаны на рисунке 11.
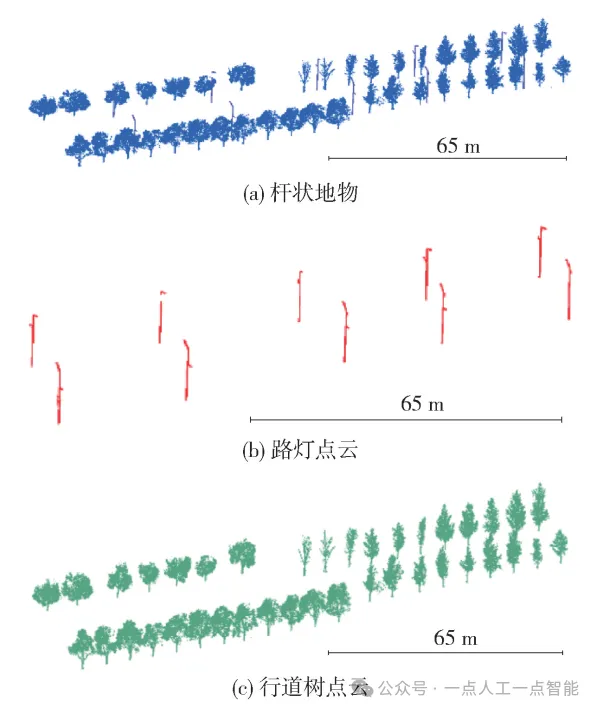
Как видно из рисунка 11, все уличные фонари и уличные деревья в данных 1 извлекаются точно. Поскольку все облако точек кроны уличных деревьев относительно велико и сложно, в этом разделе анализируется только эффект извлечения уличных фонарей в соответствии с таблицей. 5 можно обнаружить, что точность извлечения уличных фонарей не так высока, как у границ дорог и линий разметки, но все же достигает 92%.
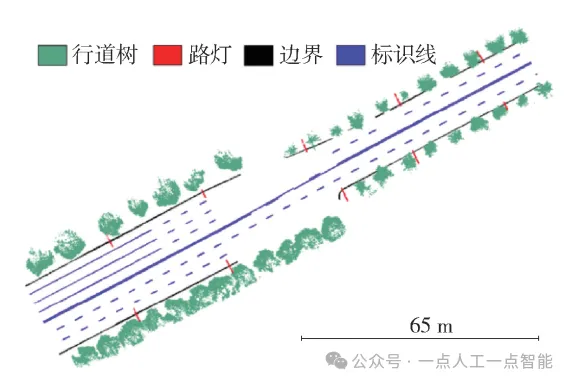
Наконец, чтобы более интуитивно отобразить результаты выделения целевых объектов городских дорог, в этой статье извлеченным целевым облакам точек присваиваются разные цвета. На примере данных 1 деревья — зеленые, уличные фонари — красные, границы дорог — черные. и дорожные знаки. Линия синего цвета, как показано на рисунке. 12、13 показано.
2.4 3D реконструкция дорогиэксперимент
в праве2组данные进行Эксперимент по извлечению дорожных целейназад,便需要从这些道路目标点云середина提取获得3D реконструкция Различные параметры, необходимые для дорог. Как только основные параметры определены, 3D реконструкция дороги метод быстрой автоматизированной реконструкции моделей дорог.
Для облака граничных точек дороги необходимо проредить облако граничных точек и получить значения координат X, Y, Z граничных точек дороги с интервалом 5 м, а затем параметры базового трапецеидального семейства для реконструкция дорог рассчитана.
Для дорожной разметки необходимо получить координаты четырех угловых точек длинной и короткой разметки. Длина и ширина длинной и короткой разметки рассчитываются на основе координат угловых точек и фиксируется направление движения. При этом значения координат верхнего и нижнего правых углов для удобства загрузки.
Для уличных фонарей и уличных деревьев достаточно подробного моделирования одного уличного фонаря, а также пакетного копирования и размещения модели уличного фонаря с координатами уличного фонаря. Уличные фонари в данных 1 были уточнены и смоделированы, а затем основаны. на столбообразной площадке Значения координат во время подгонки объекта размещают уличные фонари и уличные деревья в правильных положениях соответственно.
Окончательная модель трехмерной реконструкции показана на рисунках 14 и 15.
03 в заключение
1) Автоматическое определение границ дороги может быть выполнено на основе характеристик пространственного распределения бордюрных камней.
2) Автоматическое извлечение линий дорожной разметки может быть выполнено на основе характеристик интенсивности, информации о высоте и информации о плотности точек облака точек дороги, установленного на транспортном средстве.
3) Использование трехмерных стержнеобразных элементов и двумерных дуговых элементов фонарных столбов и уличных деревьев для обнаружения и классификации элементов в форме столбов может завершить автоматическое извлечение уличных фонарей и уличных деревьев.
4) На основе извлеченных целевых характеристик можно выполнить трехмерную реконструкцию дороги посредством параметрического проектирования и реализовать оцифровку дороги.
В этой статье проверяется эффективность предлагаемого метода с помощью двух наборов экспериментальных данных.,Осуществляет автоматическое извлечение и реконструкцию границ дорог, линий знаков, уличных фонарей и уличных деревьев.,Оба индекса превысили 92%,По сравнению с существующими алгоритмами он был значительно улучшен.
В исследовании также имеются некоторые недостатки, которые требуют дальнейшего изучения и совершенствования. В реальных ситуациях на большинстве городских дорог есть бордюры, но когда на дорогах нет бордюров, то, как определить границы дорог, требует дальнейшего изучения; некоторые параметры алгоритма основаны на ручном опыте, а адаптивность необходимо дополнительно улучшить в местах с плотной застройкой; деревья, могут возникнуть ситуации, когда уличные фонари и деревья пересекаются, что повлияет на классификацию наземных объектов. В будущем будут проводиться дальнейшие исследования того, как разделить пересекающиеся уличные фонари и уличные деревья.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
