Используйте макетную плату Wukong Pai Quanzhi H3, чтобы построить всенаправленную колесную машину на основе системы ROS.
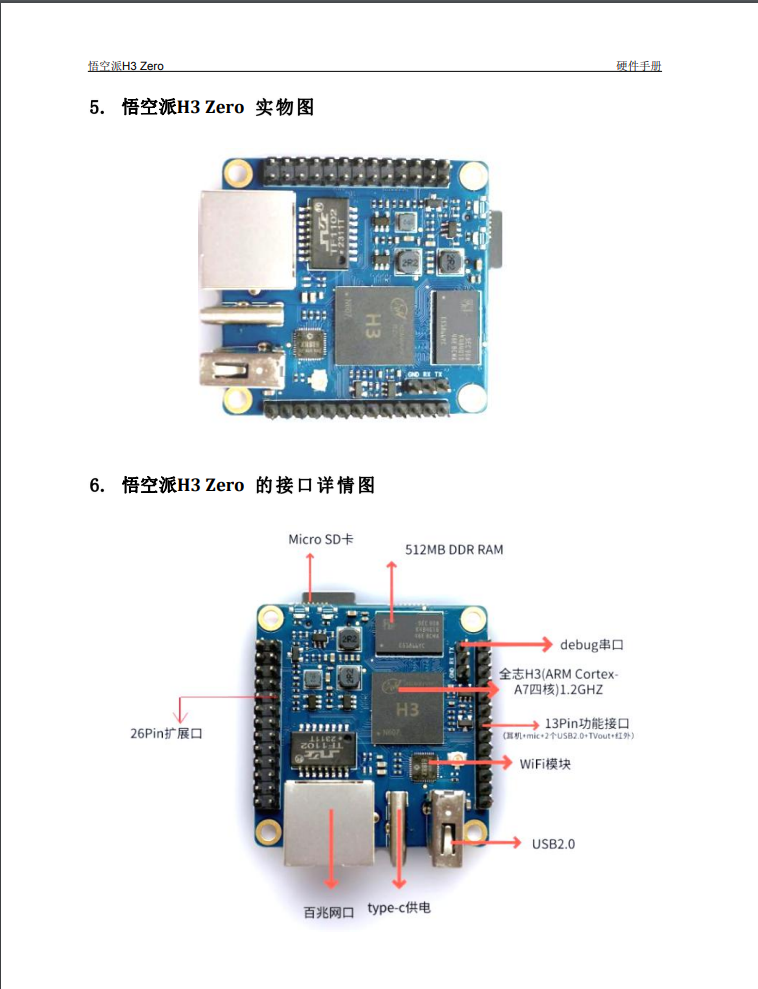
Wukongpai — это одноплатный карточный компьютер с открытым исходным кодом, плата разработки нового поколения Linux, которая может работать под управлением таких операционных систем, как Linux, Ubuntu и Debian. Плата разработки Wukongpai H3 Zero использует встроенную систему Allwinner H3 и имеет память DDR3 объемом 256/512 МБ.

Эта плата для разработки является не только потребительским продуктом, но и предназначена для всех, кто хочет использовать технологии для творчества и инноваций. Это очень простой, интересный и практичный инструмент, который можно использовать для создания окружающего нас мира. В этом испытании я покажу вам некоторые ключевые особенности этой мощной доски и то, как я использовал ее для создания всенаправленной тележки.
2. Введение в дизайн продукта
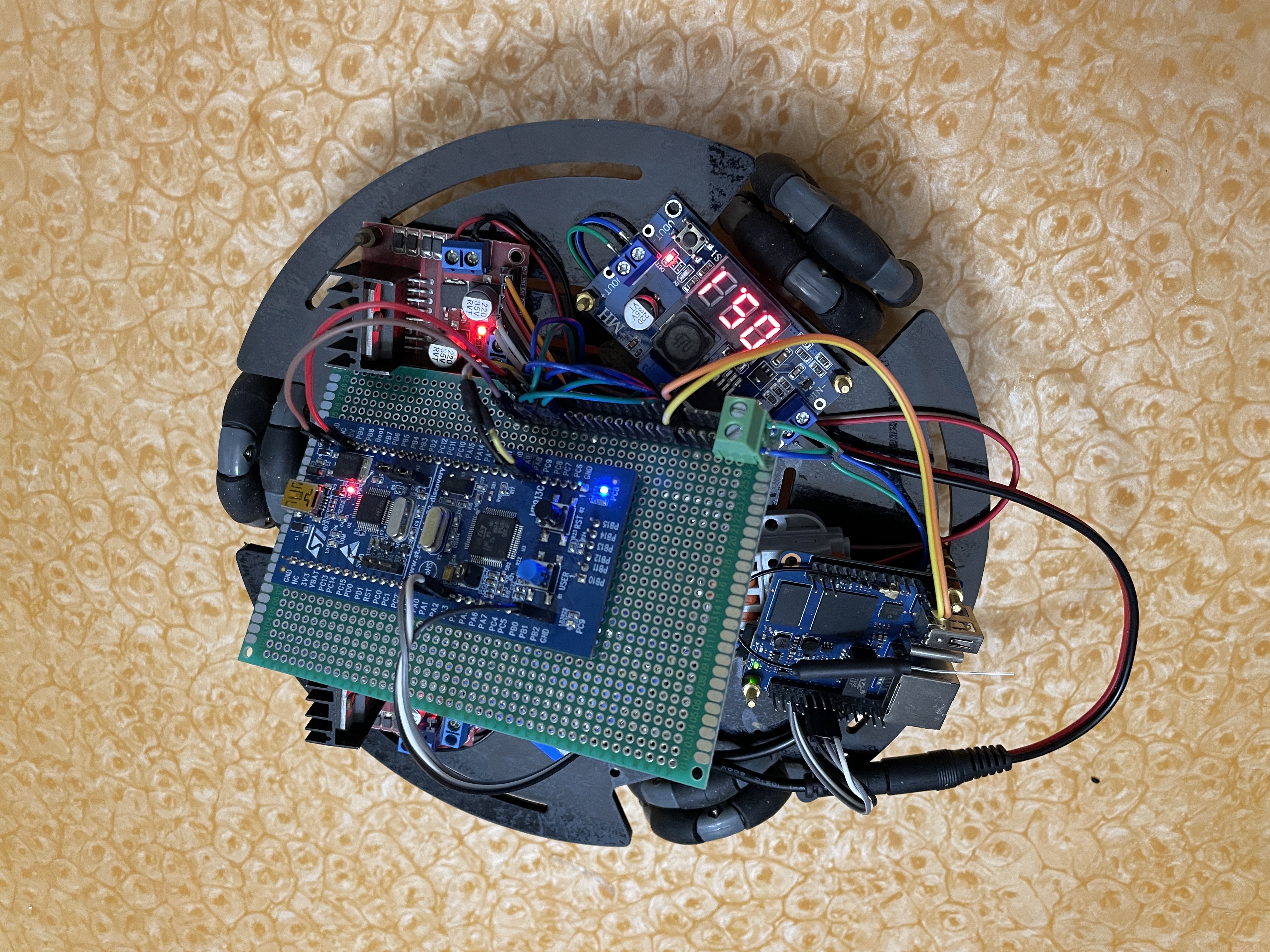
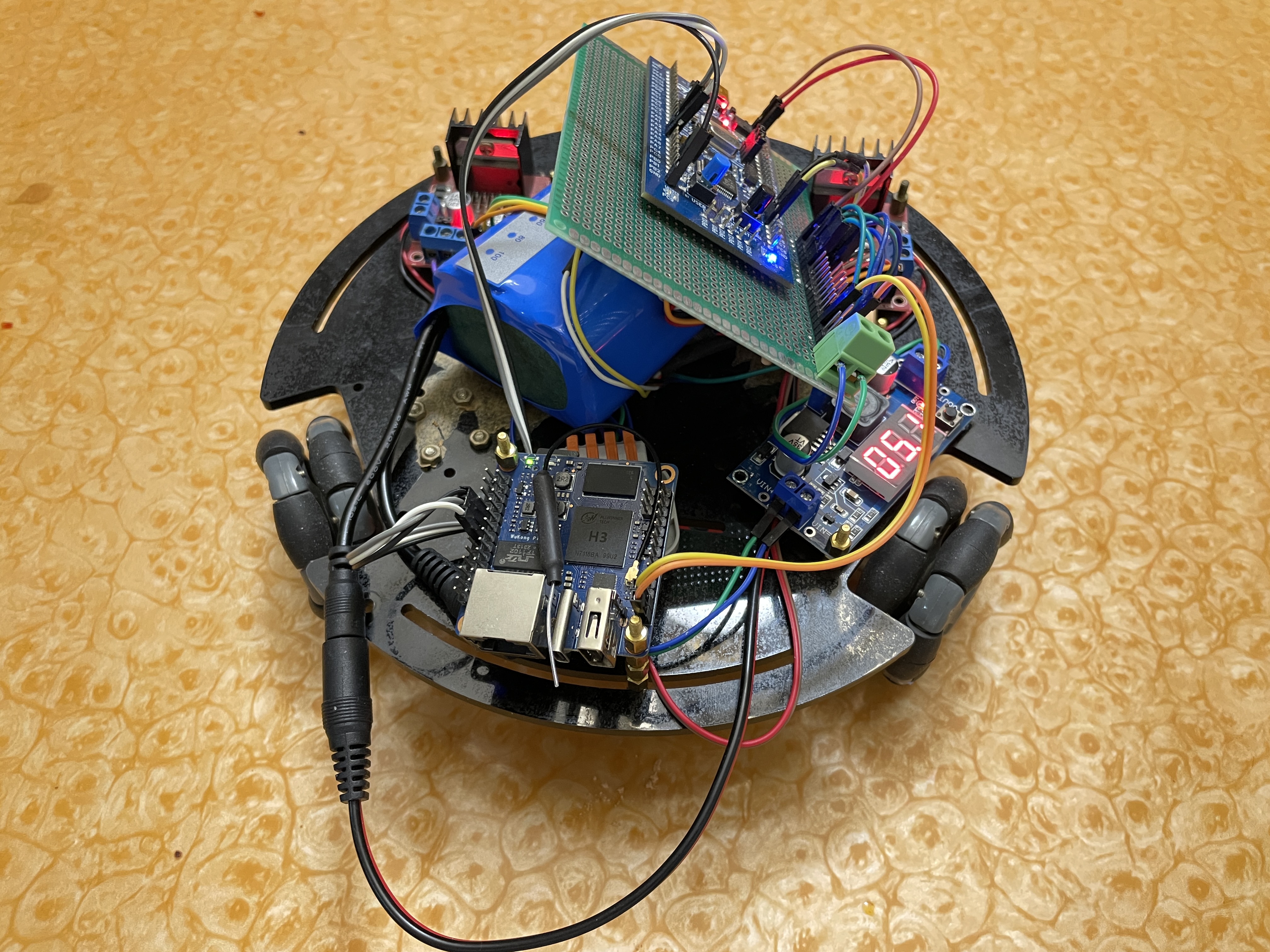
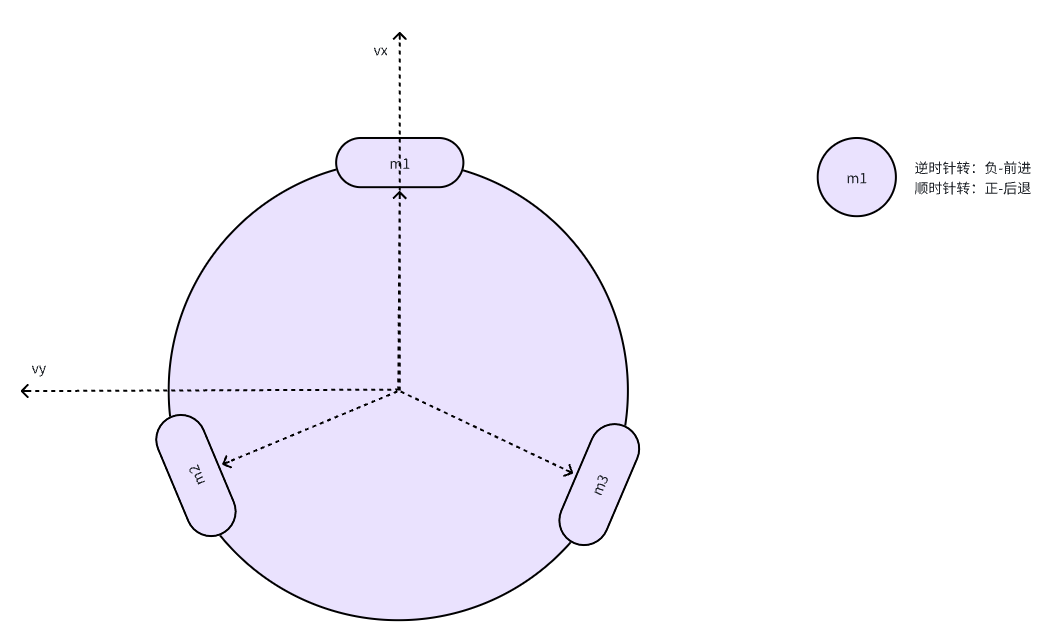
Разработанная на этот раз машина с всенаправленными колесами имеет три всенаправленных колеса с энкодерами обратной связи, установленными на круглом шасси. Центром управления является плата разработки Wukongpai H3, основанная на системе ROS, команда скорости передается на автомобиль через контроллер STM32. на шасси. STM32 отвечает за управление движением всенаправленной колесной машины и передачу данных о скорости в режиме реального времени обратно в систему ROS.
Такая конструкция позволяет автомобилю обладать высокой маневренностью и точным управлением движением. Благодаря совместной работе систем Wukongpai H3 и ROS мы можем удаленно управлять автомобилем, получать данные о пробеге в режиме реального времени и гибко перемещаться в сложных условиях.
В следующем видео я подробно покажу детальную конструкцию и характеристики этой всенаправленной колесной машины, а также то, как использовать Wukong Pai H3 и систему ROS для управления и обратной связи по данным.
3. Детальный проект
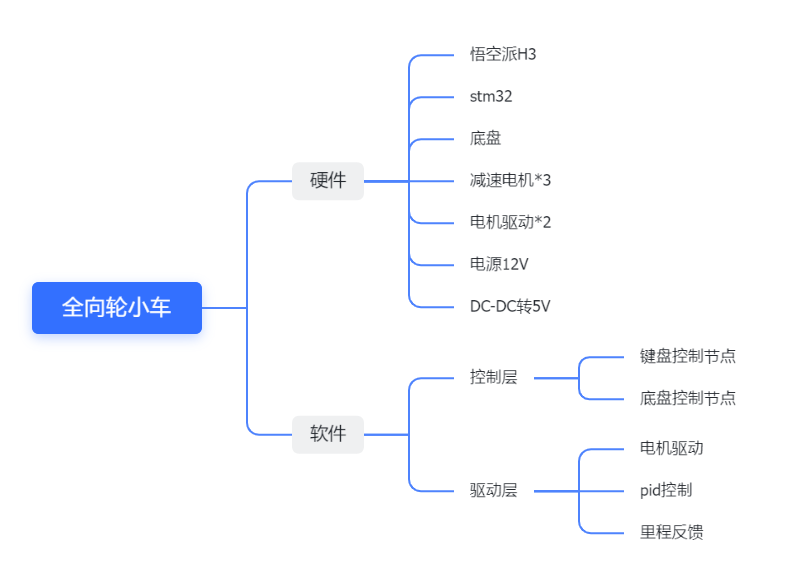
Подготовка оборудования:
1 часть Wukongpai H3 используется в качестве управляющего мозга автомобиля.
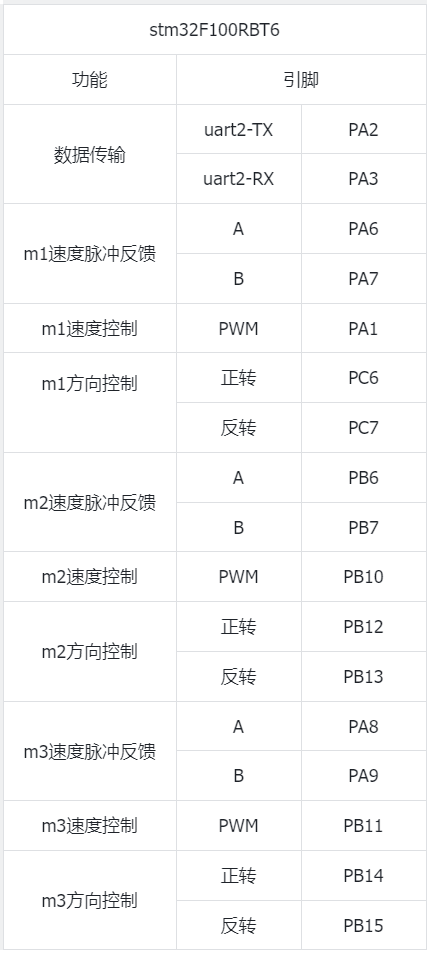
1 часть stm32f100RBT6 используется для получения скорости, отправленной Wukong Pai H3, и управления двигателем для движения с указанной скоростью, одновременно возвращая скорость каждого двигателя.
1 шасси, 3 редуктора с энкодерами, которые могут отслеживать скорость в реальном времени.
2 моторных привода L298N
1 источник питания 12 В
1 модуль постоянного тока на 5 В
Схема программного управления:
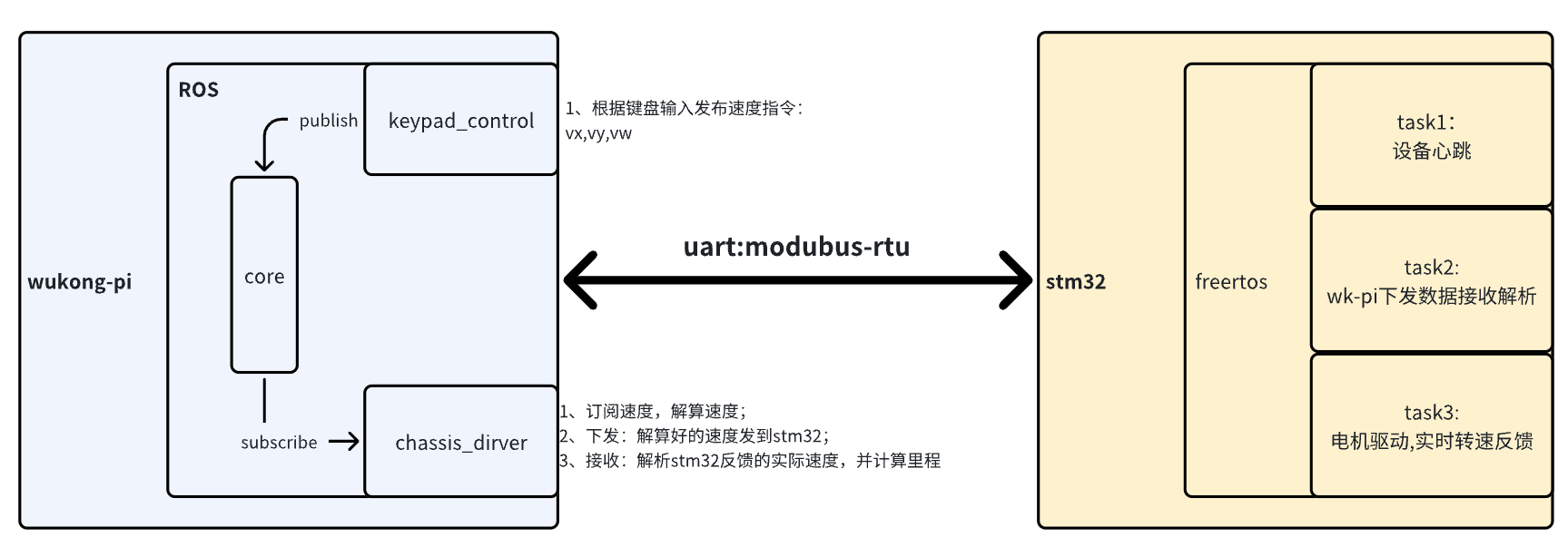
Сторона H3 фракции Вуконг: Установите систему ROS на Wukongpai H3 и создайте два узла: узел обнаружения ввода с клавиатуры keypad_control и узел управления шасси Chassis_driver.
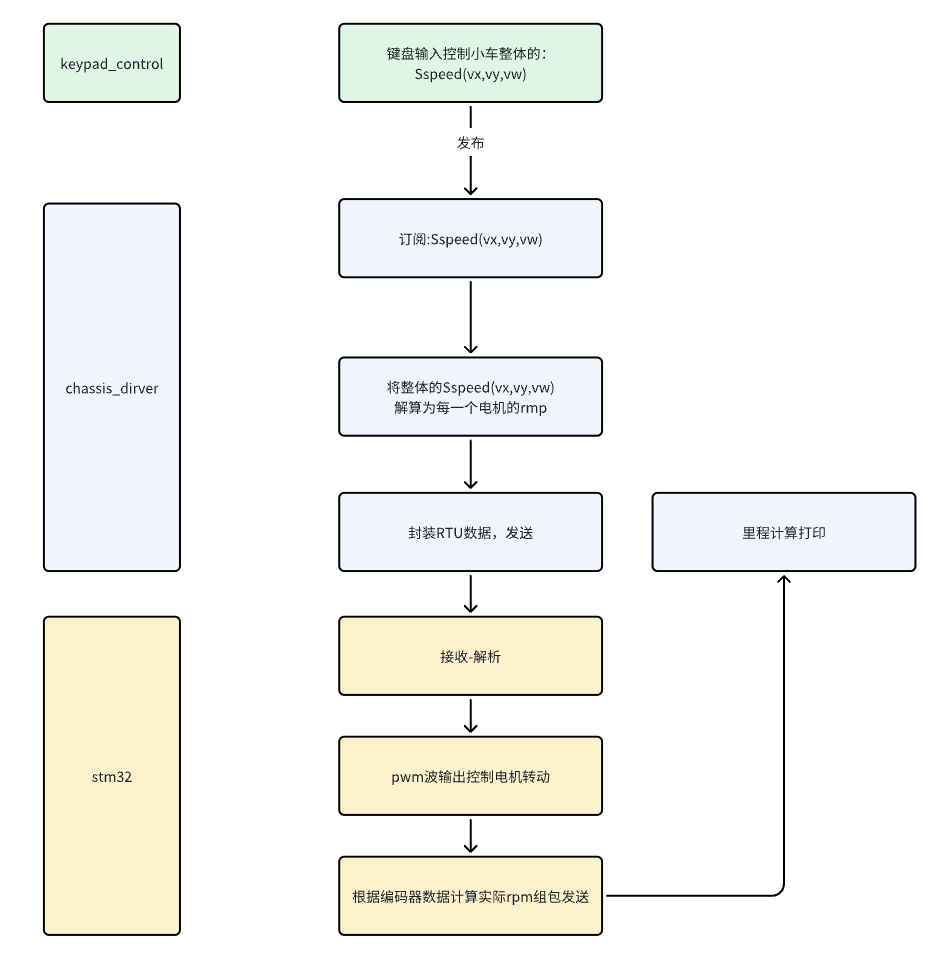
Узел keypad_control реализует обнаружение ввода с клавиатуры и отключение скорости. Например, при нажатии кнопки w скорость транспортного средства 0,05 м/с передается в узел шасси_драйвер, и скорость увеличивается на 0,05 м/с при каждом нажатии. .
Узел шасси_драйвер подписывается на скорость управления, опубликованную keypad_control, вычисляет скорость каждого всенаправленного колеса в соответствии с трехколесной моделью и использует протокол modbus-rtu через последовательный порт для распределения скорости, обратной связи и расчета пробега и т. д.
Последовательная связь использует:

Трехколесная модель:
сторона stm32:
Используйте систему freertos в stm32, чтобы создать 3 задачи. Задача 1: реализовать индикатор сердцебиения, который мигает в течение фиксированной продолжительности. Задача 2: получить данные о скорости, отправленные Вуконгом Паем, и проанализировать их. Задача 3: ПИД-регулирование скорости двигателя и обратная связь по скорости в реальном времени.
Определение проводки следующее:
Блок-схема программы:
4. Демонстрация функций
Управление с клавиатуры: вперед, назад, поворот налево на месте, поворот направо на месте, движение влево, движение вправо.
Расчет пробега:
5. Резюме
Плата разработки Wukongpai H3 хорошо показала себя в испытаниях по созданию всенаправленного колесного автомобиля под системой ROS.
Его мощная аппаратная производительность, поддержка ROS и производительность управления делают его идеальным выбором для разработки роботов. Несмотря на некоторые потенциальные недостатки, в целом это



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
