Google Earth Engine (GEE) – Глобальная база данных о наводнениях, версия 1 (2000–2018 гг.)
Глобальная база данных о наводнениях содержит 2000-2018 произошло во время 913 Карта масштабов и сроков наводнений. Для получения дополнительной информации см. Похожие журнальные статьи。
наводнениесобытиеизДартмутская обсерватория паводковсобранный , использовал для сбора MODIS изображение. выбрано 913 события - это те, которые используют Terra и Aqua MODIS датчик 12,719 События, в которых сцена была успешно отрисована (прошла контроль качества, поскольку за пределами постоянной воды было значительное погружение). во всем диапазоне дат каждого наводнения, с 250 Разрешение риса классифицирует каждый пиксель как водный или неводный и генерирует последующие продукты данных, включая максимальную степень затопления («зона наводнения») и продолжительность затопления в небесных единицах («продолжительность» группа). Вода во время наводнений и неводная классификация включает постоянную воду (переборка приведена здесь 30 рис JRC Глобальный набор данных о поверхностных водах) представляет собой постоянную воду с разрешением 250 рис),Его можно замаскировать, чтобы изолировать затопление, используя группу «jrc_perm_water». Добавлены дополнительные диапазоны качества данных.,Представляет условия облачности во время наводнения (например,,«clear_views» представляет количество четких изображений, наблюдавшихся между датами начала и окончания наводнения.,«clear_perc» представляет собой процентную продолжительность (небо) наблюдений ясного неба в течение всего события.
Каждое изображение в ImageCollection представляет собой карту одного наводнения. Коллекцию можно фильтровать по дате, стране или оригинальному идентификатору Дартмутской обсерватории наводнений.
Доступность набора данных
2000-02-17T00:00:00Z - 2018-12-10T00:00:00
Поставщик набора данных
Cloud to Street (C2S) / Dartmouth Flood Observatory (DFO)
Земляной двигатель Цитата:
ee.ImageCollection("GLOBAL_FLOOD_DB/MODIS_EVENTS/V1")
разрешение 30 рис
группа
Имя | единица | чувствительный | максимум | описывать |
|---|---|---|---|---|
flooded | 0 | 1 | Максимальная степень наводнения во время мероприятия. 1 – площадь поверхностных вод 0 – нет воды | |
duration | небо | Продолжительность пребывания поверхностных вод во время события (независимо от единицы). Значение пикселя представляет собой составное число неба, в течение которого область пикселя рассматривалась как вода. период использования 3 небоиз MODIS Составное изображение. | ||
clear_views | небо | 0 | 65535 | Количество безоблачных наблюдений между датами начала и окончания каждого события. Облачность от MODIS Зона обеспечения качества («state_1km») определена. |
clear_perc | % | 0 | 100 | Процент наблюдений в чистом поле зрения во время данного наводнения. Это эквивалентно группе «clear_views», но нормализовано для каждого события наводнения. MODIS Количество изображений. Облачное покрытие состоит из MODIS Зона обеспечения качества («state_1km») определена. |
jrc_perm_water | 0 | 1 | Зависит от JRC Глобальный набор данных о поверхностных водах, определенный с использованием «переходной» группы «постоянная» вода。разрешениеоставаться как JRC Исходный набор данных 30 рисразрешение。 1 - постоянная вода 0 - Не вода. |
- 1 - Площадь поверхностных вод
- 0 - нет воды
durationнебо Продолжительность пребывания поверхностных вод во время события (независимо от единицы). Значение пикселя представляет собой составное число неба, в течение которого область пикселя рассматривалась как вода. период использования 3 небоиз MODIS Составное изображение.
clear_viewsнебо065535 Количество безоблачных наблюдений между датами начала и окончания каждого события. Облачность от MODIS Зона обеспечения качества («state_1km») определена.
clear_perc%0100 Процент наблюдений в чистом поле зрения во время данного наводнения. Это эквивалентно группе «clear_views», но нормализовано для каждого события наводнения. MODIS Количество изображений. Облачное покрытие состоит из MODIS Зона обеспечения качества («state_1km») определена.
jrc_perm_water01 Зависит от JRC Глобальный набор данных о поверхностных водах, определенный с использованием «переходной» группы «постоянная» вода。разрешениеоставаться как JRC Исходный набор данных 30 рисразрешение。
- 1 - постоянная вода
- 0 - Не вода.
Свойства изображения
Имя | тип | описывать |
|---|---|---|
ID | INT | Уникальный каталожный идентификатор наводнения, соответствующий данным Дартмутской обсерватории наводнений (DFO). |
СС | Нить | Трехбуквенный код страны по стандарту ISO (в списке) страны, в которой было обнаружено наводнение на водоразделе, пересекающем полигон событий DFO. |
нация | Нить | с DFO Названия наций (в списке) наций, в которых были обнаружены наводнения в бассейнах, где пересекаются полигоны событий. |
dfo_centroid_x | двойной | Долгота центроида полигона DFO, определяющего местоположение наводнения (база данных DFO). |
dfo_centroid_y | двойной | Широта центроида полигона DFO, определяющего местоположение наводнения (база данных DFO). |
dfo_country | Нить | основнойнаводнениенация(DFO база данных). |
dfo_other_country | Нить | наводнениеизвторичныйнация(DFO база данных). |
dfo_displaced | INT | Примерное общее количество людей, оставшихся без крова или эвакуированных после наводнений (DFO база данных). |
dfo_main_cause | Нить | Основные причины событий флуда в базе данных ДФО. Не стандартизировано. |
dfo_severity | двойной | Серьезность наводнений (DFO база данных): 1 - Крупное наводнение, значительный ущерб строениям или сельскому хозяйству, количество погибших и/или зарегистрированных с момента последнего подобного события 5-15 Годовой интервал 1,5 - очень большойизсобытие:>15 Нянь Дэн <100 Интервал рецидива, лет2 - Экстремальные события: интервал повторения > 100 Год) |
dfo_dead | INT | Предполагаемое количество смертей в результате наводнений (DFO база данных). |
dfo_validation_type | Нить | Основной источник подтверждения события наводнения (DFO база данные). Не стандартизированы. |
glide_index | Нить | Глобальный идентификационный номер. |
gfd_country_code | Нить | Две буквы названия нации/региона, пересекающего бассейн, через запятую. FIPS нация/Список кодов городов, которые используются в качестве областей интереса в алгоритме обнаружения воды. |
gfd_country_name | Нить | Название нации (в списке), пересекающей водораздел, используемый в качестве области интереса в алгоритме обнаружения воды. |
Тип соединения | Нить | Числа неба, используемые для синтеза в алгоритме обнаружения воды. |
Пороговое значение | Нить | Тип порога для классификации алгоритма обнаружения воды/без воды - «оцу» или «стандарт». |
порог_b1b2 | двойной | Порог, применяемый к соотношению b2b1, используемому в алгоритме обнаружения воды. |
Порог_b7 | двойной | используется в алгоритмах обнаружения водыгруппа 7 (SWIR) порог. |
otsu_sample_res | двойной | используется для строительства MODIS Разрешение пространства редуктора мозаики (с m для единицы), а затем сделать выборку из нее и оценить otsu Порог (доступно только при использовании otsu вместо порога по умолчанию для событий наводнения). |
порог наклона | двойной | Значение, используемое для маскировки крутых участков из алгоритма обнаружения воды, чтобы минимизировать ошибки при затенении местности. |
- 1 - Крупное наводнение, значительный ущерб строениям или сельскому хозяйству, количество погибших и/или зарегистрированных с момента последнего подобного события 5-15 годовой интервал
- 1.5 - очень большойизсобытие:>15 Нянь Дэн <100 лет между рецидивами
- 2 - Экстремальные события: интервал повторения > 100 Год)
dfo_deadINT Предполагаемое количество смертей в результате наводнений (DFO база данных). dfo_validation_typeНить Основной источник подтверждения события наводнения (DFO база данные). Не стандартизированы. glide_indexНить глобальный идентификационный номер。 gfd_country_codeНить Две буквы названия нации/региона, пересекающего бассейн, через запятую. FIPS нация/Список кодов городов, которые используются в качестве областей интереса в алгоритме обнаружения воды. gfd_country_nameНить Название нации (в списке), пересекающей водораздел, используемый в качестве области интереса в алгоритме обнаружения воды. Тип соединения Нить Числа неба, используемые для синтеза в алгоритме обнаружения воды. Тип порога Нить Тип порога для классификации алгоритма обнаружения воды/без воды - «оцу» или «стандарт». порог_b1b2двойной Порог, применяемый к соотношению b2b1, используемому в алгоритме обнаружения воды. Порог_b7двойной используется в алгоритмах обнаружения водыгруппа 7 (SWIR) порог. otsu_sample_resдвойной используется для строительства MODIS Разрешение пространства редуктора мозаики (с m для единицы), а затем сделать выборку из нее и оценить otsu Порог (доступно только при использовании otsu вместо порога по умолчанию для событий наводнения). порог наклонадвойной Значение, используемое для маскировки крутых участков из алгоритма обнаружения воды, чтобы минимизировать ошибки при затенении местности.
Код:
var gfd = ee.ImageCollection('GLOBAL_FLOOD_DB/MODIS_EVENTS/V1');
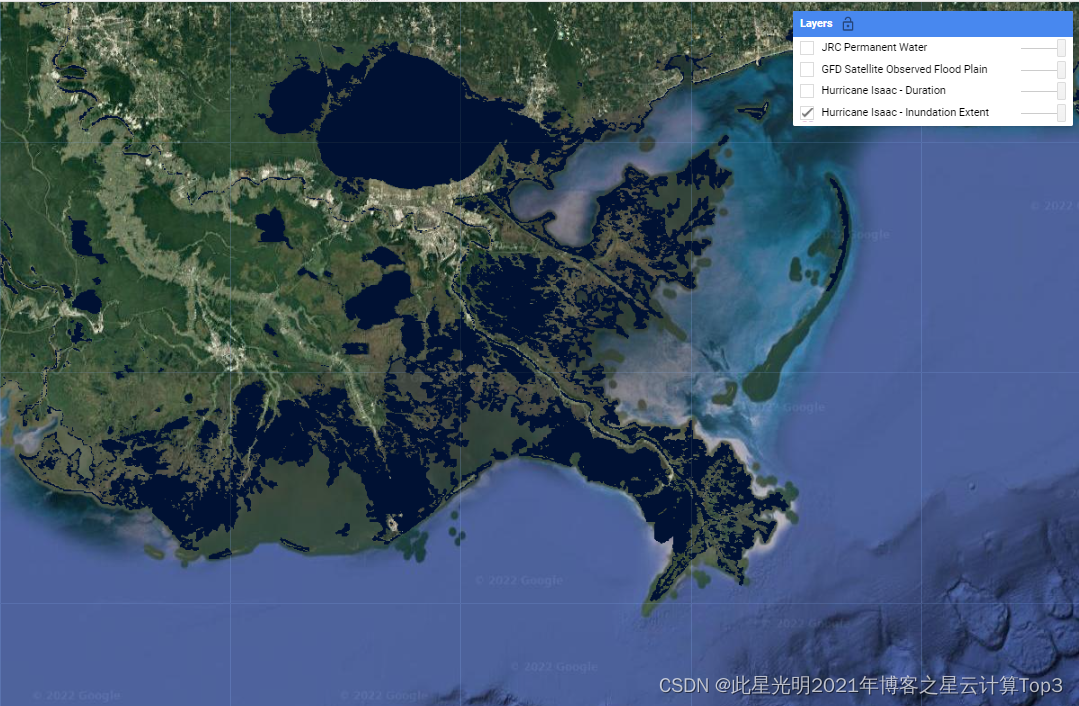
// Отдельное событие наводнения — Зависит. от Наводнение, вызванное ураганом Айзек в США.
var hurricaneIsaacDartmouthId = 3977;
var hurricaneIsaacUsa = ee.Image(
gfd.filterMetadata('id', 'equals', hurricaneIsaacDartmouthId).first());
Map.setOptions('SATELLITE');
Map.setCenter(-90.2922, 29.4064, 9);
Map.addLayer(
hurricaneIsaacUsa.select('flooded').selfMask(),
{min: 0, max: 1, palette: '001133'},
'Hurricane Isaac - Inundation Extent');
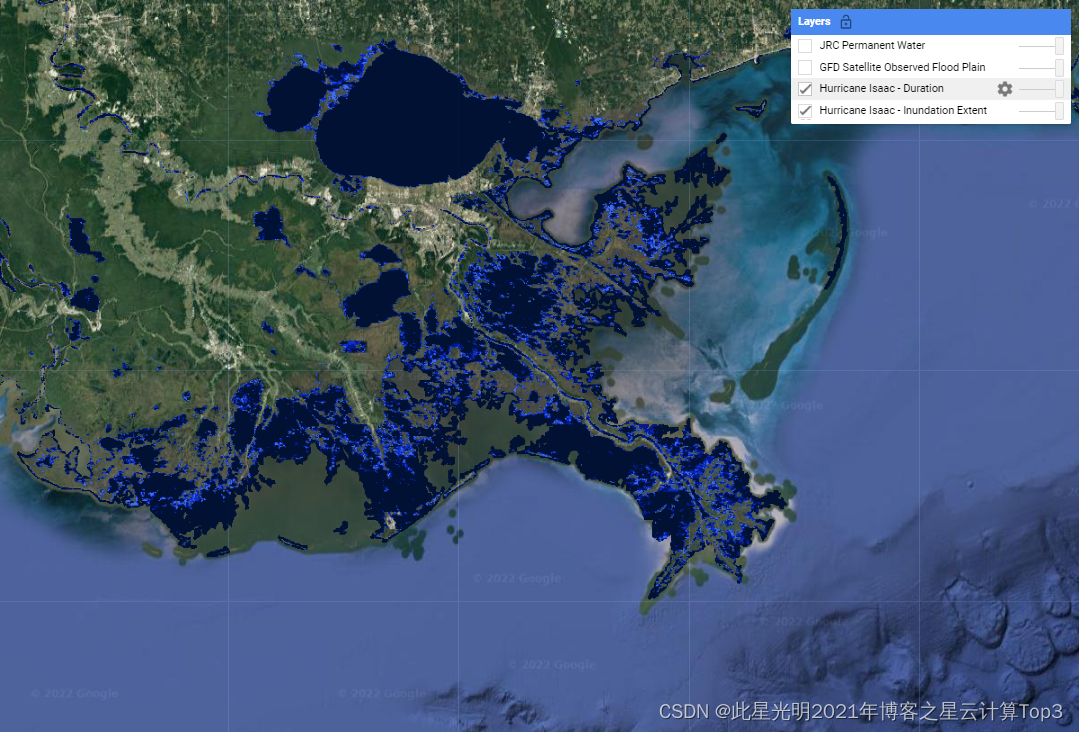
// Продолжительность (количество раз, когда длился наводнение).
var durationPalette = ['C3EFFE', '1341E8', '051CB0', '001133'];
Map.addLayer(
hurricaneIsaacUsa.select('duration').selfMask(),
{min: 0, max: 4, palette: durationPalette},
'Hurricane Isaac - Duration');
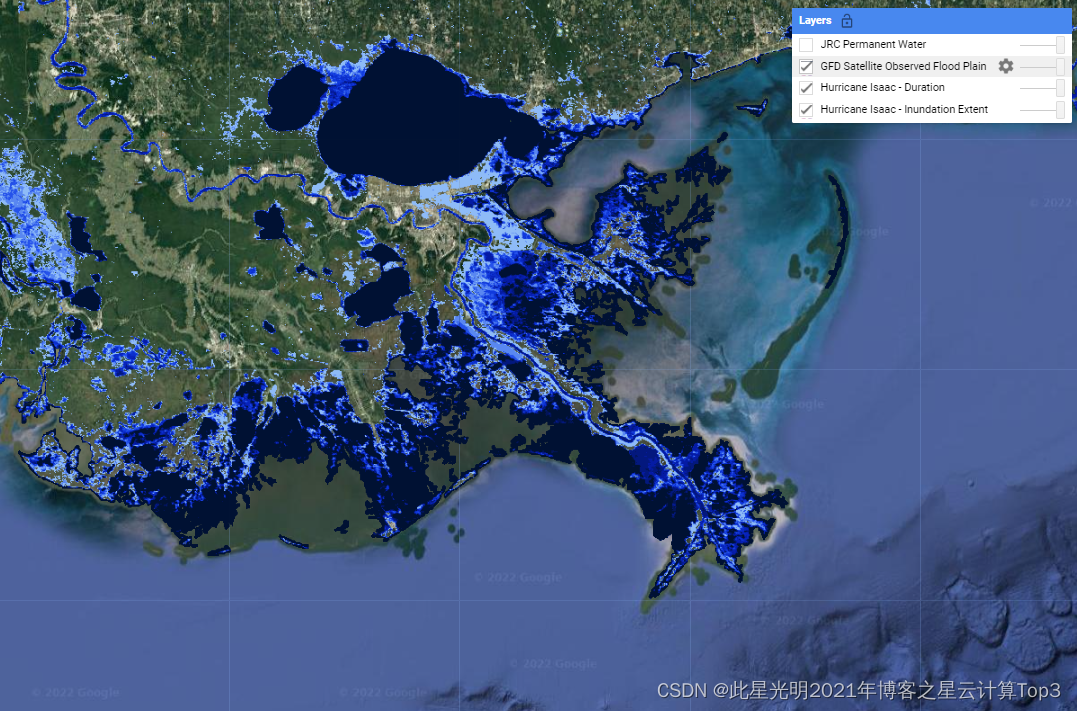
// Все наводнения нанесены на карту, чтобы создать исторические поймы, наблюдаемые со спутников.
var gfdFloodedSum = gfd.select('flooded').sum();
Map.addLayer(
gfdFloodedSum.selfMask(),
{min: 0, max: 10, palette: durationPalette},
'GFD Satellite Observed Flood Plain');
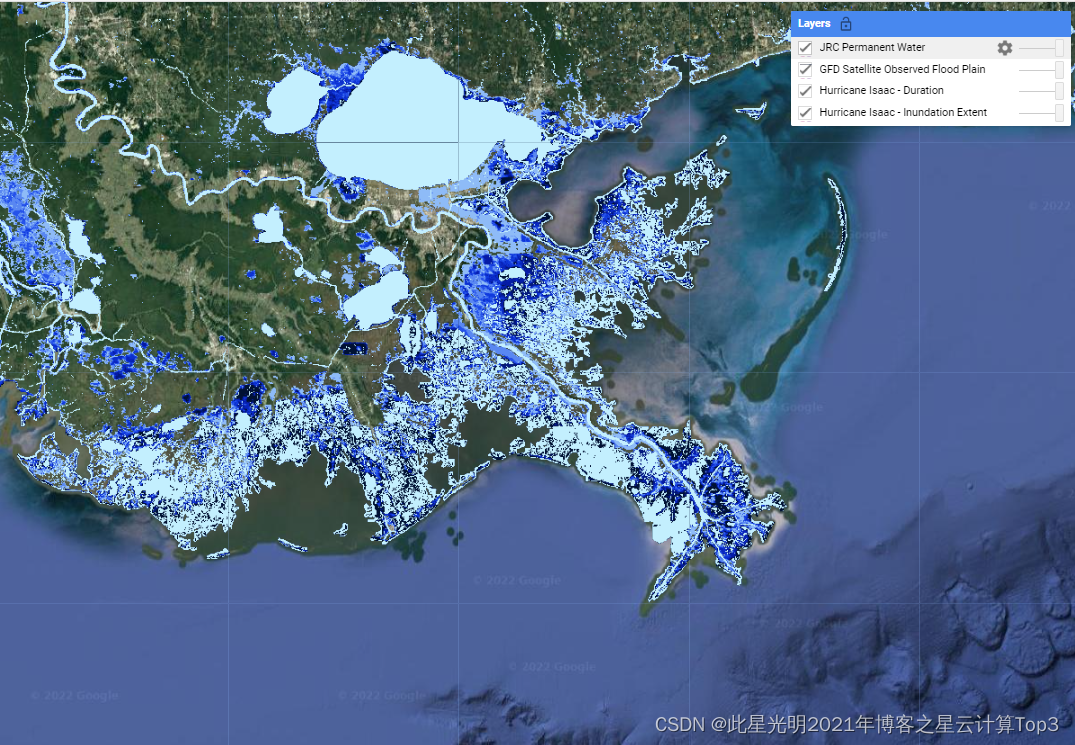
// крышкапостоянная область воды, чтобы различать наводнения.
var jrc = gfd.select('jrc_perm_water').sum().gte(1);
Map.addLayer(
jrc.selfMask(),
{min: 0, max: 1, palette: 'C3EFFE'},
'JRC Permanent Water');Цитировать:
Citations:
- Tellman, B., J.A. Sullivan, C. Kuhn, A.J. Kettner, C.S. Doyle, G.R. Brakenridge, T. Erickson, D.A. Slayback. (Accepted.) Satellites observe increasing proportion of population exposed to floods. Nature. doi:10.1038/s41586-021-03695-w
результат:



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
