Фактическое измерение точности изображения четырех типичных 3D-камер при съемке сцен на открытом воздухе.
Различные приложения предъявляют разные требования к различным аспектам производительности 3D-камеры, включая разрешение, поле зрения, расстояние изображения, точность, частоту кадров и т. д. Как правильно выбрать камеру в соответствии с вашими реальными потребностями — это вопрос, который необходимо учитывать на ранних этапах разработки многих продуктов 3D-видения. 3D-приложения для внутренних сцен относительно зрелы. Камеры со структурированным светом широко используются для наведения промышленных роботов; TOF-камеры и бинокулярные камеры широко используются в бытовой электронике, автоматическом вождении роботов и т. д. В последние годы постепенно открываются различные 3D-приложения для уличных сцен. В настоящее время имеется мало отчетов об анализе эффектов изображения различных типичных камер в уличных сценах и областях их применения. Чтобы дать возможность академическим исследованиям и разработчикам продуктов 3D-видения получить общее представление об этой проблеме, в этой статье приведены следующие фактические измерения эффектов изображения четырех типичных 3D-камер:
1. Бинокулярная 3D-камера известной иностранной марки (именуемая в дальнейшем бинокулярная камера A) в настоящее время является самой известной бинокулярной 3D-камерой в мире и официально предназначена для использования на открытом воздухе;
2. Известная зарубежная марка бинокулярной 3D-камеры (далее - бинокулярная камера B) является самым известным продуктом в мире после бинокулярной камеры A. Официально указано, что ее можно использовать на открытом воздухе;
3. Камера со структурированным светом известной отечественной марки (далее называемая камерой со структурированным светом А);
4. Бесконечный тензор Tensor Eye (далее Tensor Eye), официально указано, что его можно использовать в сценах на открытом воздухе.
На этот раз мы протестировали эффекты изображения этих четырех 3D-камер на типичных материальных объектах в условиях сильного наружного освещения, сосредоточившись на анализе точности и стабильности изображения.
В следующей таблице показаны некоторые параметры четырех моделей камер.
модель | разрешение | Номинальная точность | Скорость изображения | расходы |
|---|---|---|---|---|
Бинокулярный фотоаппарат А | RGB: 1920x1080 Карта глубины: 1280x720 | Официально не дано | 30fps | Низкий |
Бинокулярная камера Б | RGB: 2208x1242 Карта глубины: 2208x1242 | Официально не дано | 15 кадров в секунду, в зависимости от внешней вычислительной мощности | , необходимо настроить дополнительную вычислительную мощность графического процессора |
Камера структурированного света А | RGB: 2592×1944 Карта глубины: 1280×1024 | Точность значения Z 0,12 ~ 0,56 мм | 2.5fps | высокий |
Tensor Eye | RGB: 3840x2160 Карта глубины: 1920x1080 | Точность значения Z: 1–5 мм при 1,5–4 м. | 1~2fps | высокий |
Тестовые объекты включают в себя: бетон, камни, кирпичи, металл, дерево, бумажные изделия, пластик, растения и т. д., все снято на открытом воздухе, с расстоянием изображения 1,5–1,8 м.
Давайте посмотрим на результаты теста. Изображения каждого набора результатов теста: Тензор. Выход глазной камеры RGB-изображение, Бинокулярный фотоаппарат Облако точек выхода А, Бинокулярная камера Вывод облака точек с помощью Б, вывод облака точек с помощью структурированного света A и Tensor Облако точек, выводимые Eye, имеет многослойный формат. Среди них Бинокулярный фотоаппарат Аи Бинокулярная камера Все работают в режиме повышенной точности.
1. Металлический фонарный столб + каменный кирпич + пластиковые жалюзи.

RGB-изображение
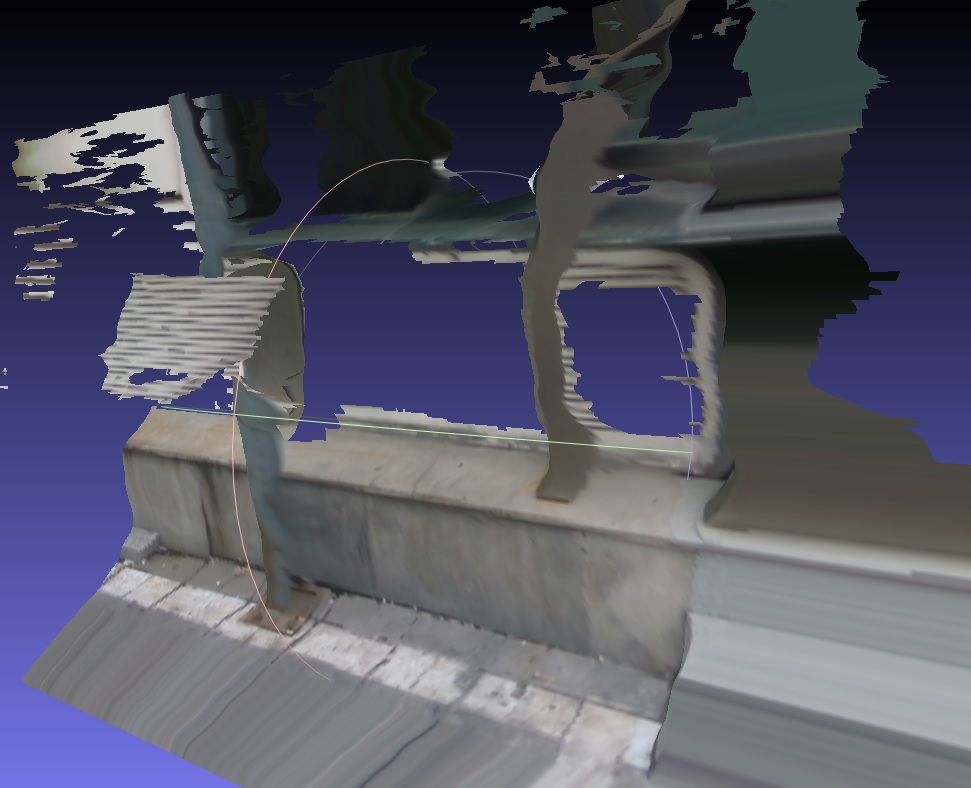
Бинокулярная камера Aоблако точек
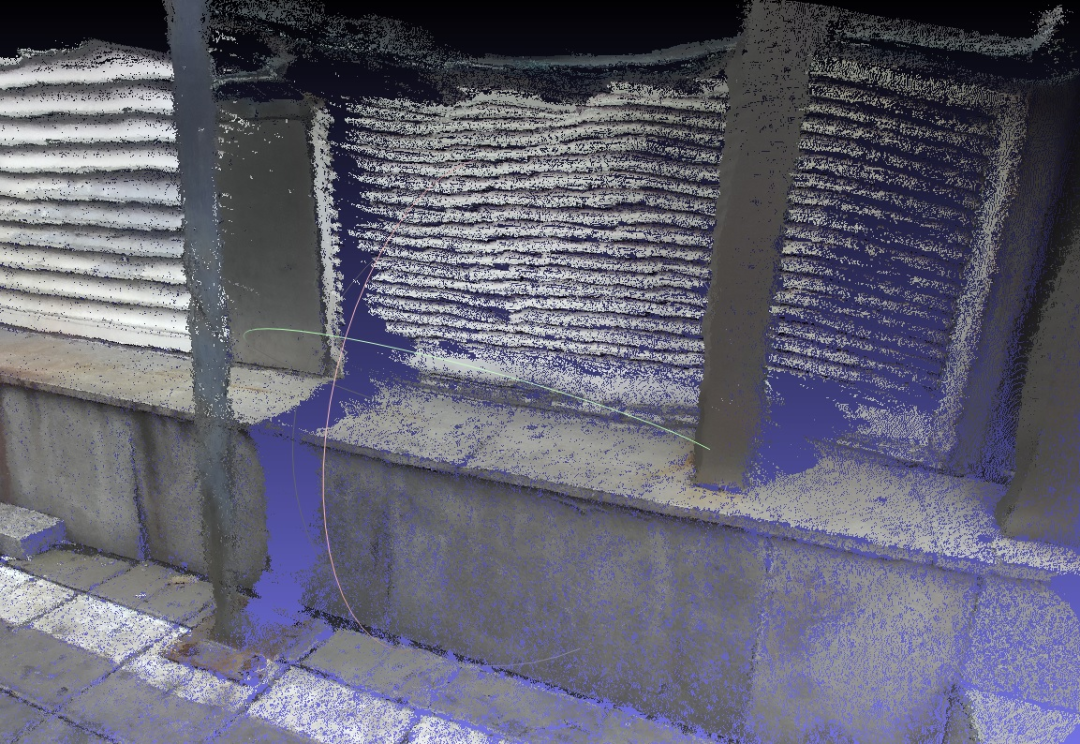
Бинокулярная камера Боблако точек
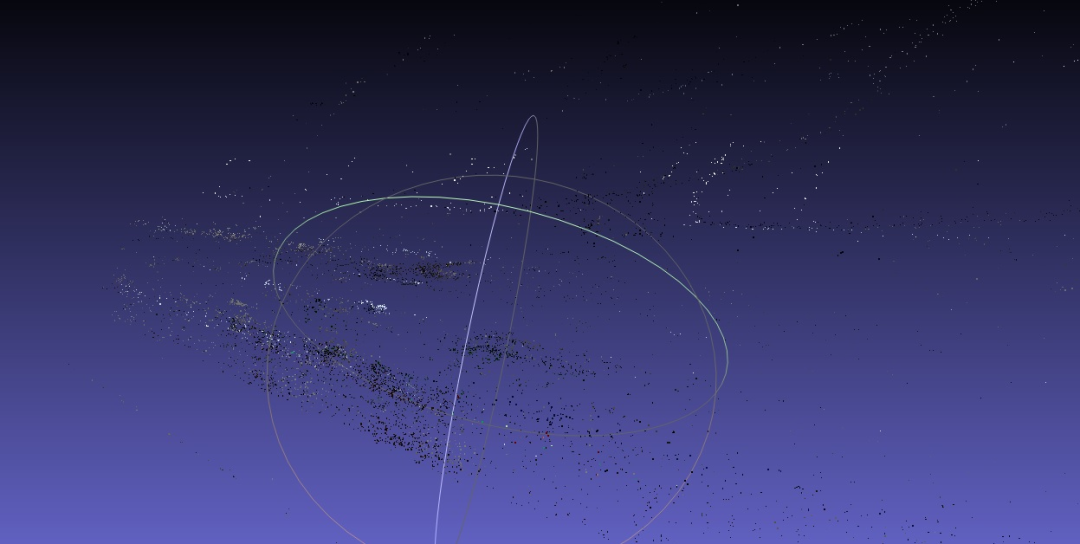
Камера структурированного света Облако точек А
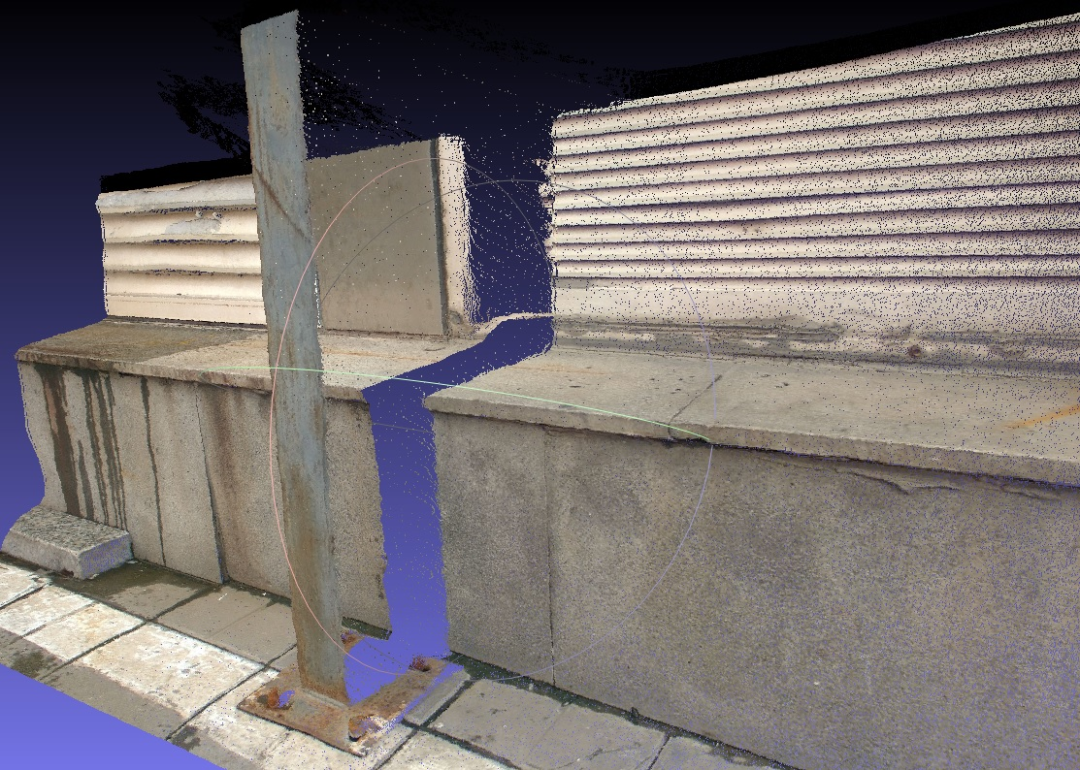
Облако точек Tensor Eye
Как видно из этого набора результатов,Когда солнечный свет на улице немного сильнее,Камеры со структурированным светом в принципе не способны отображать,Выводятся только редкие точки,因此后面不再给出它облако точек。Бинокулярный фотоаппарат В облаке точек А имеется большое количество дыр, а металлические фонарные столбы и пластиковые жалюзи сильно деформированы, с погрешностями на сантиметровом и дециметровом уровне. Бинокулярная камера Эффект изображения металлических фонарных столбов относительно хороший. фотоаппарат Есть значительное улучшение А, но погрешность изображения жалюзи большая (сильная дисторсия), которая составляет сантиметровый уровень. Тензор Eyeв этой сцене,пара металлических фонарных столбов、жалюзи、КирпичZошибка значения<2mm。
2. Деревянный поддон + бумажная упаковочная коробка + пластиковый поддон.

RGB-изображение

Бинокулярная камера Aоблако точек
Бинокулярная камера Боблако точек

Облако точек Tensor Eye
В этой сцене Бинокулярный фотоаппарат Для деревянных поддонов и пластиковых упаковочных коробок внизу все ошибки изображения составляют сантиметровый уровень, и есть очевидные деформации, видимые невооруженным глазом. Бинокулярная камера Ошибка значения Z у B для этих двух типов объектов также достигает около 1 см, а также наблюдаются деформации, видимые невооруженным глазом. Тензор EyeизZошибка значения<2mm,Никаких видимых деформаций.
3. Металлические телефонные столбы + цементный пол.

RGB-изображение
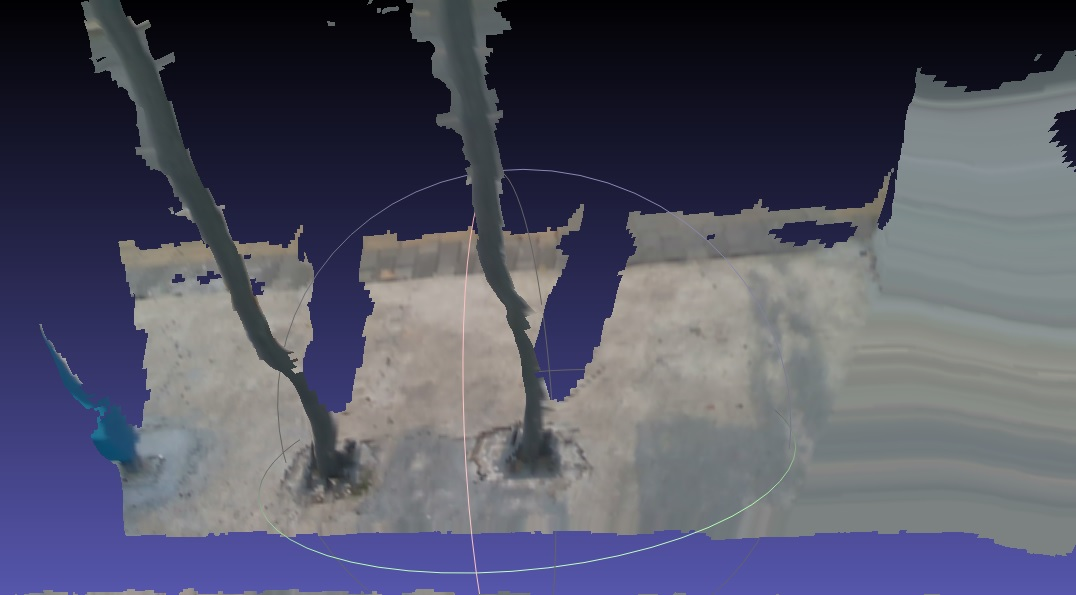
Бинокулярная камера Aоблако точек
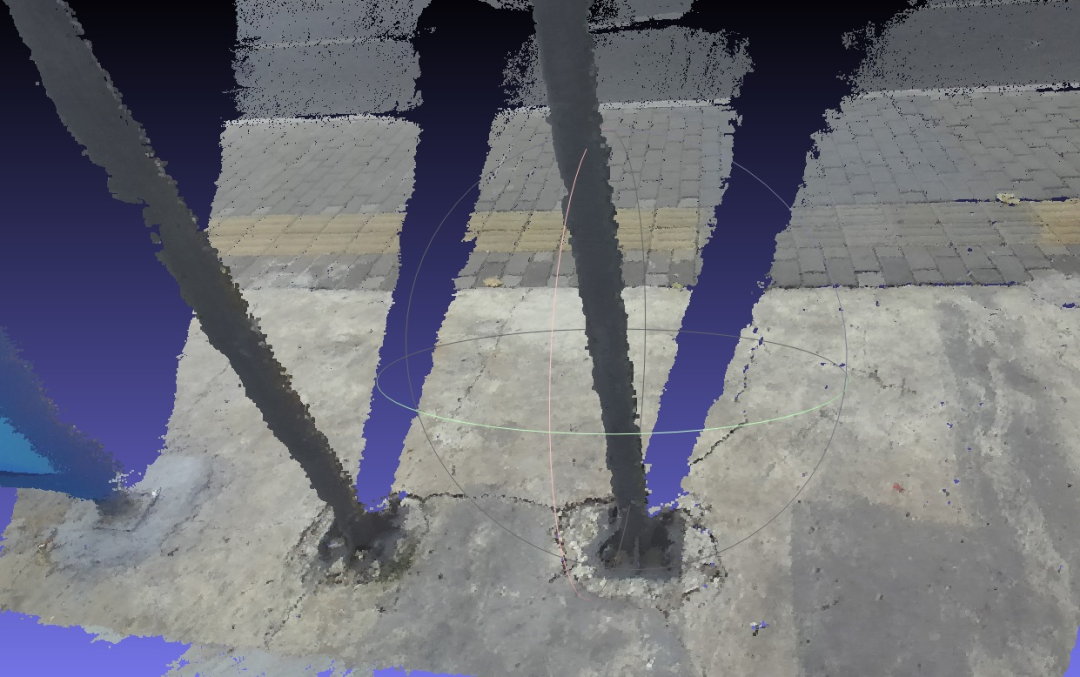
Бинокулярная камера Боблако точек
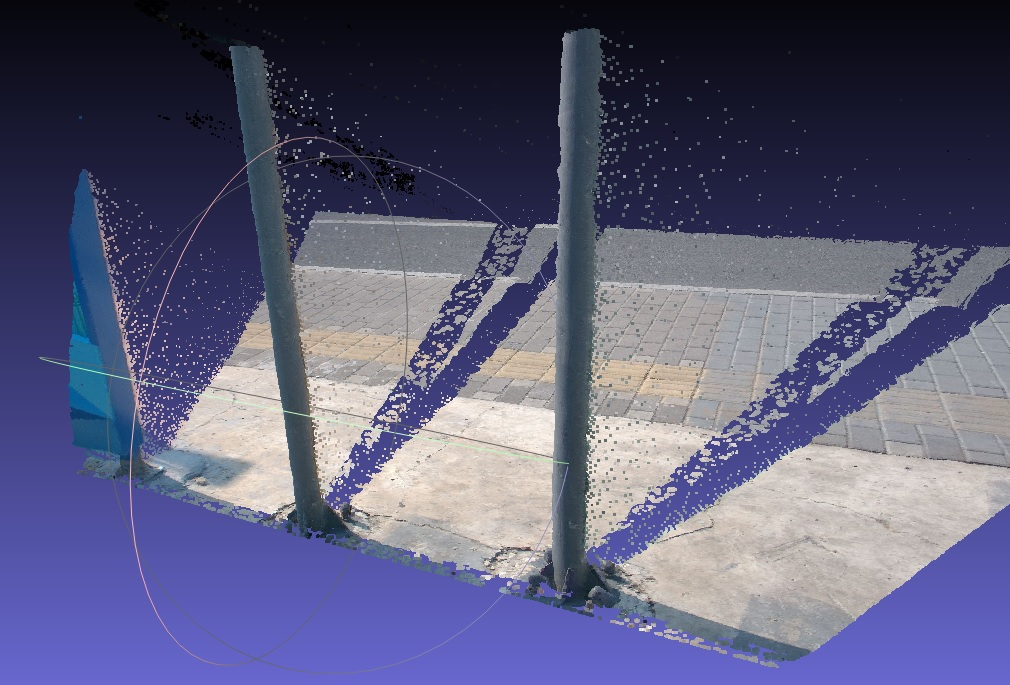
Облако точек Tensor Eye
Металлические телефонные столбы тоньше,И поверхность гладкая. в этой сцене,Бинокулярный фотоаппарат Гладкий тонкий металлический телефонный столб имеет явные искажения и деформации, а погрешности в направлениях Z и XY превышают 4 см. Бинокулярная камера Б对电线杆изZ向иXY向из误差>1cm,也有明显из变形。Tensor EyeизZ向иXYсредняя ошибка<2mm。
4. Мраморная плитка + металлическая коробка.

RGB-изображение
Бинокулярная камера Aоблако точек
Бинокулярная камера Боблако точек

Облако точек Tensor Eye
В этой сцене Бинокулярный фотоаппарат А имеет явные искажения как в металлической коробке-трансформаторе, так и в мраморной плитке.,ZиXYошибка направления>1cm,И есть дыры. Бинокулярная камера Изображение Б также имеет видимые невооруженным глазом искажения с погрешностью около 1 см. Тензор Eye对大理石砖и变电箱金属柜均无可见из扭曲,Z向иXYошибка направления<2mm。
5.Растения
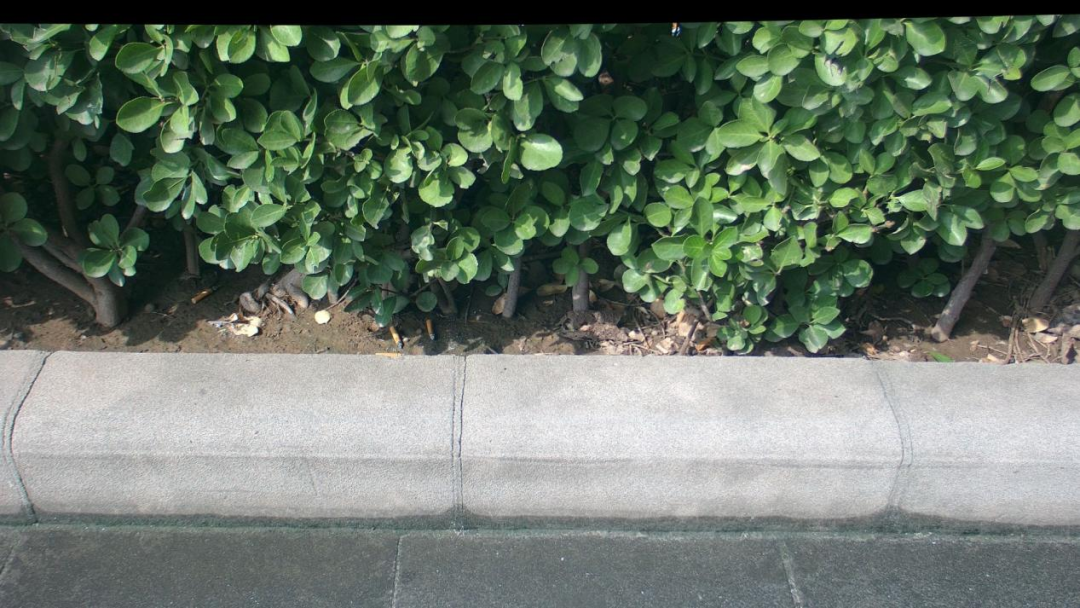
RGB-изображение
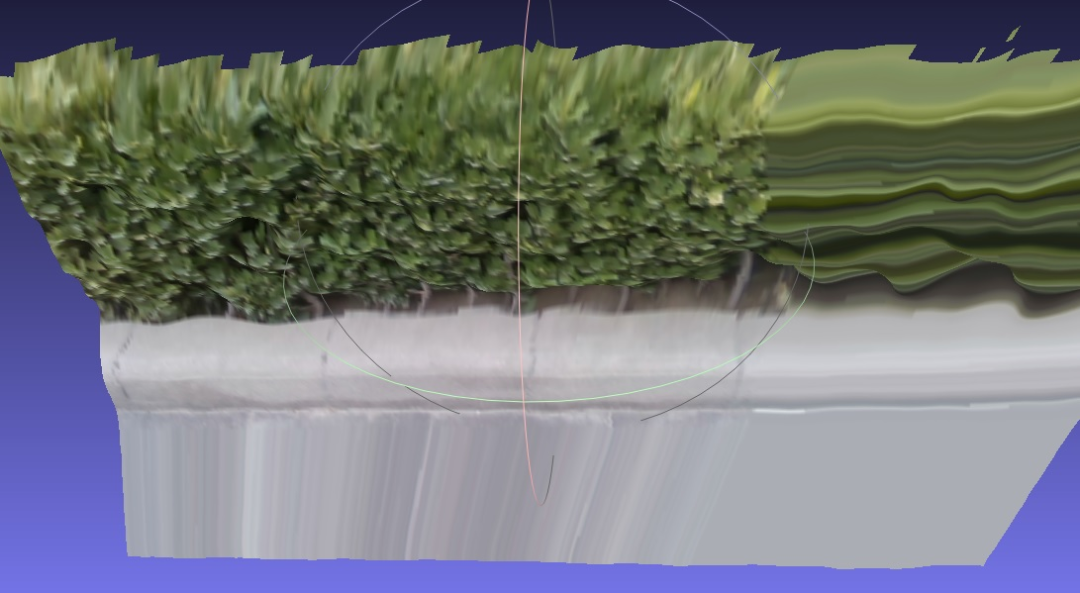
Бинокулярная камера Aоблако точек
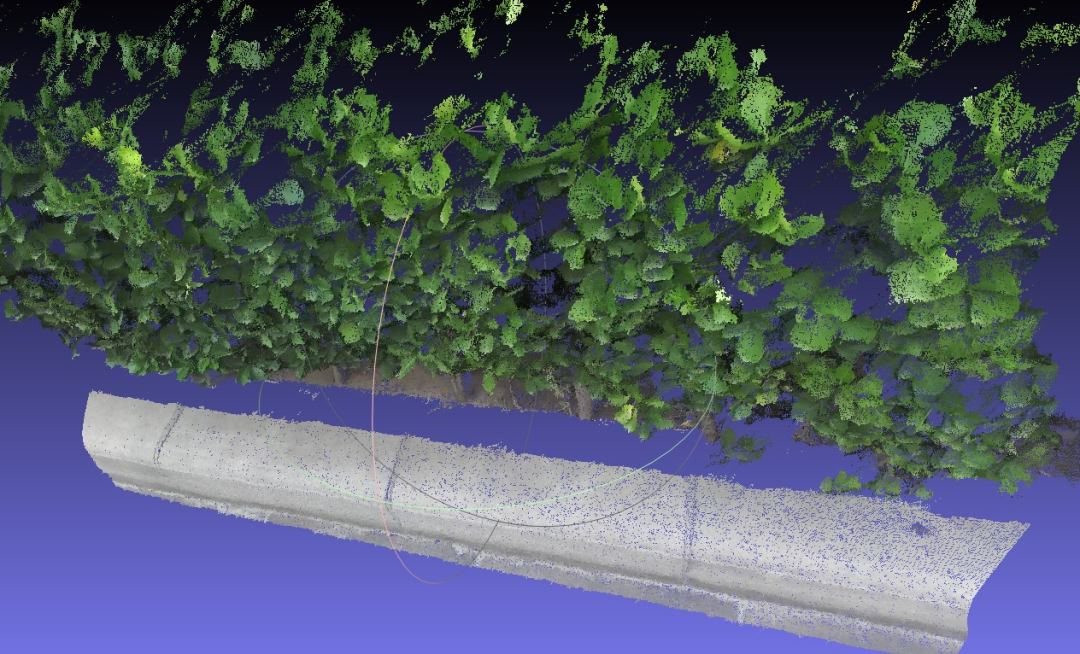
Бинокулярная камера Боблако точек
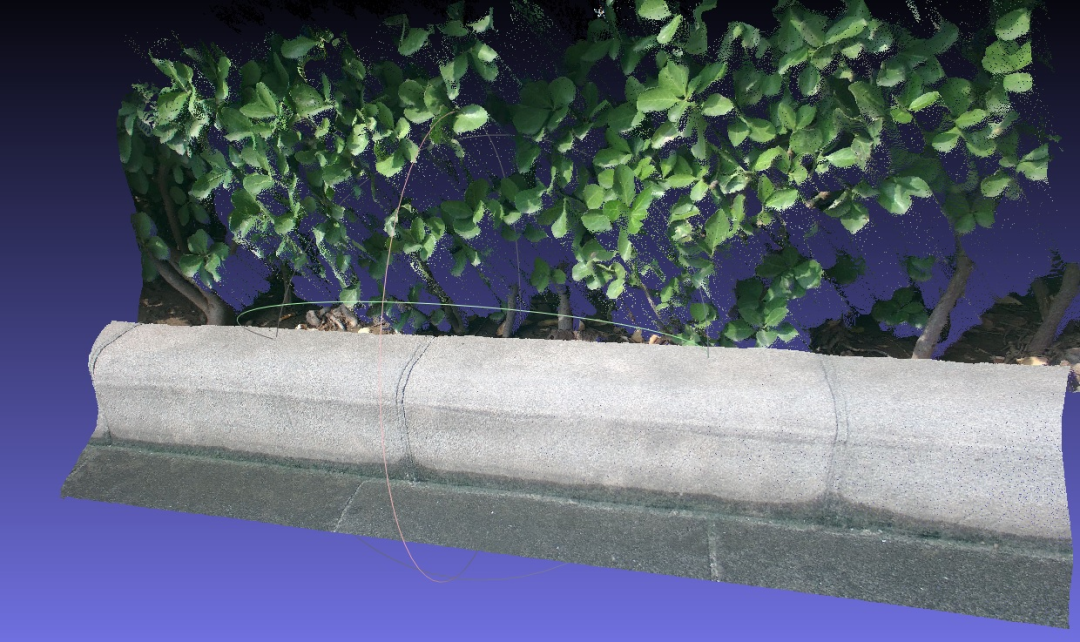
Облако точек Tensor Eye
В этой сцене Бинокулярный фотоаппарат Присутствуют и явные искажения в изображении растений. Бинокулярная камера Эффект Б лучше, чем у Бинокулярного. фотоаппарат А, но отклонения все же есть, видимые невооруженным глазом. Тензор Глазное изображение листьев не имеет искажений или отклонений, видимых невооруженным глазом.
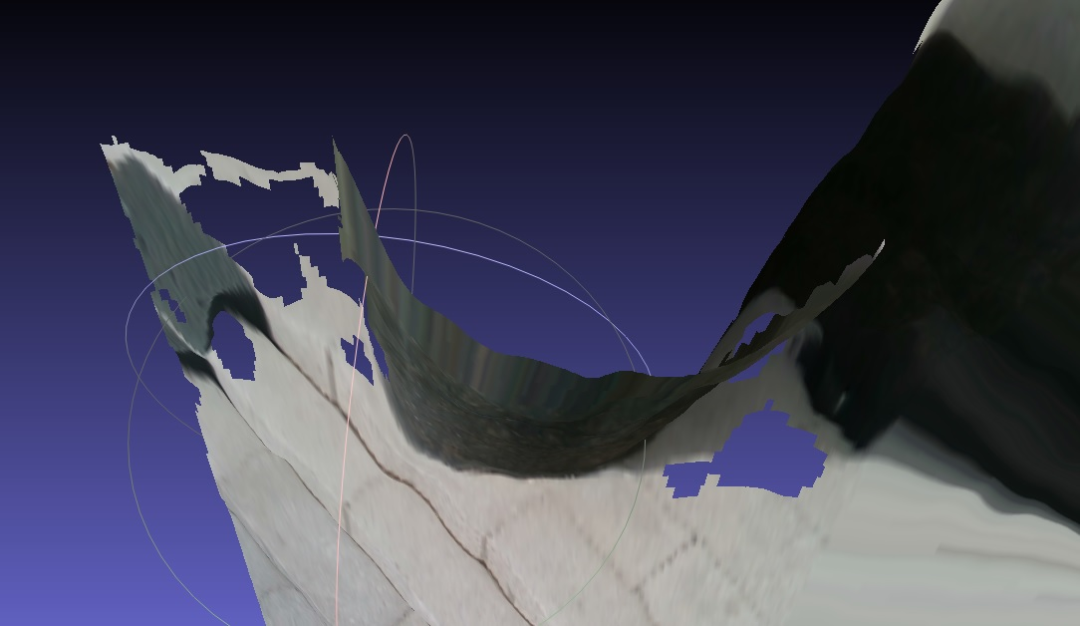
6. Земля + металлическая крышка люка

RGB-изображение
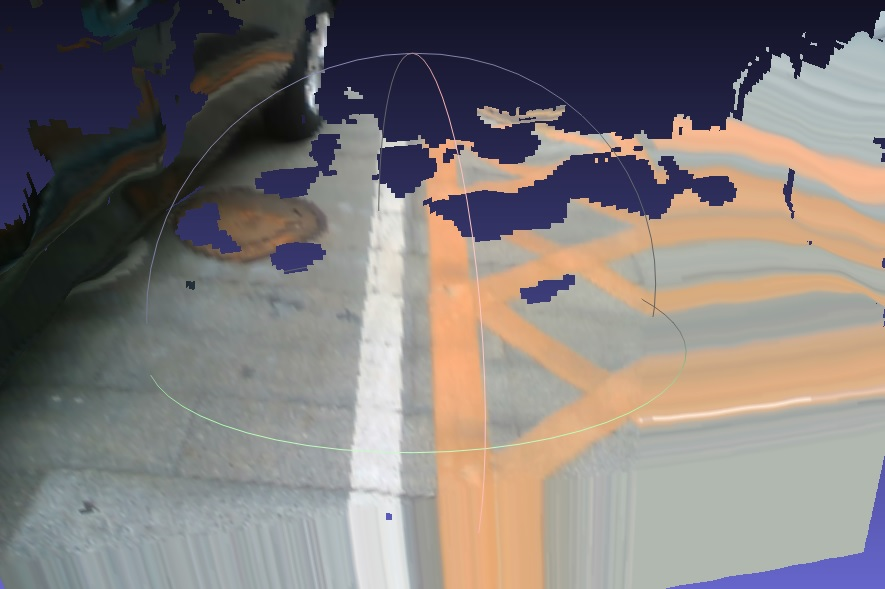
Бинокулярная камера Aоблако точек

Бинокулярная камера Боблако точек

Облако точек Tensor Eye
В этой сцене Бинокулярный фотоаппарат В А большое количество дыр, а грунт и крышка люка сильно деформированы. Погрешность XY составляет сантиметровый уровень. Бинокулярная камера B также имеет серьезные искажения на земле и крышках люков (см. линии парковки и другие знаки, нарисованные на земле, белая прямая линия на дальнем конце, указанная белой стрелкой, очень очевидна), а ошибки Z и XY также на уровне сантиметра. Тензор Eye对这两类物体均无肉眼可见из误差,Края напольной плитки, крышки люков и парковочные линии не имеют видимых искажений.,ZиXYошибка направления<3mm。
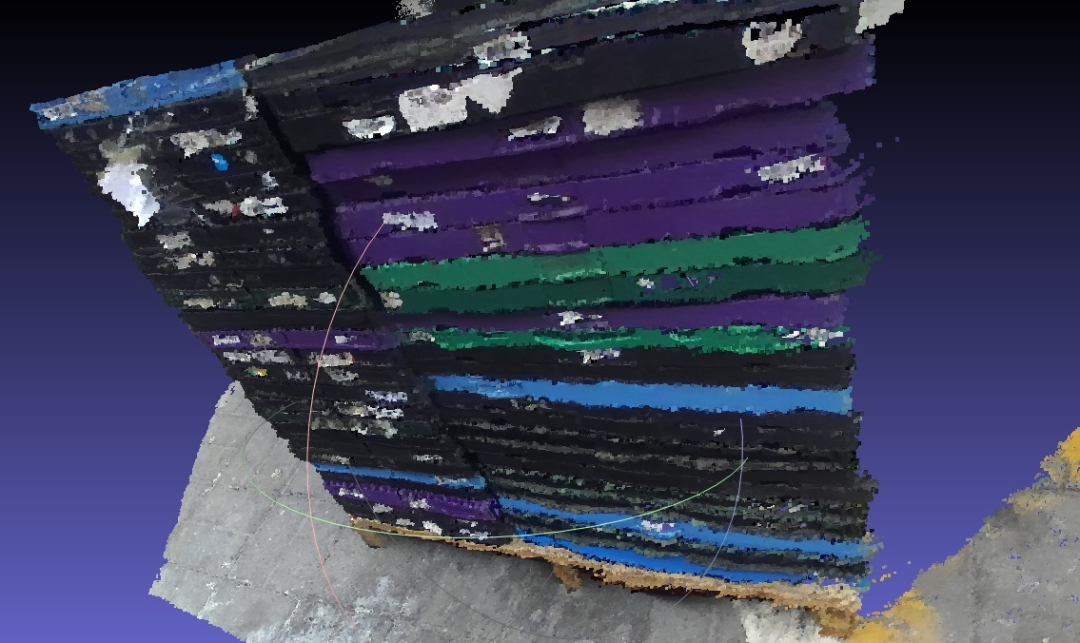
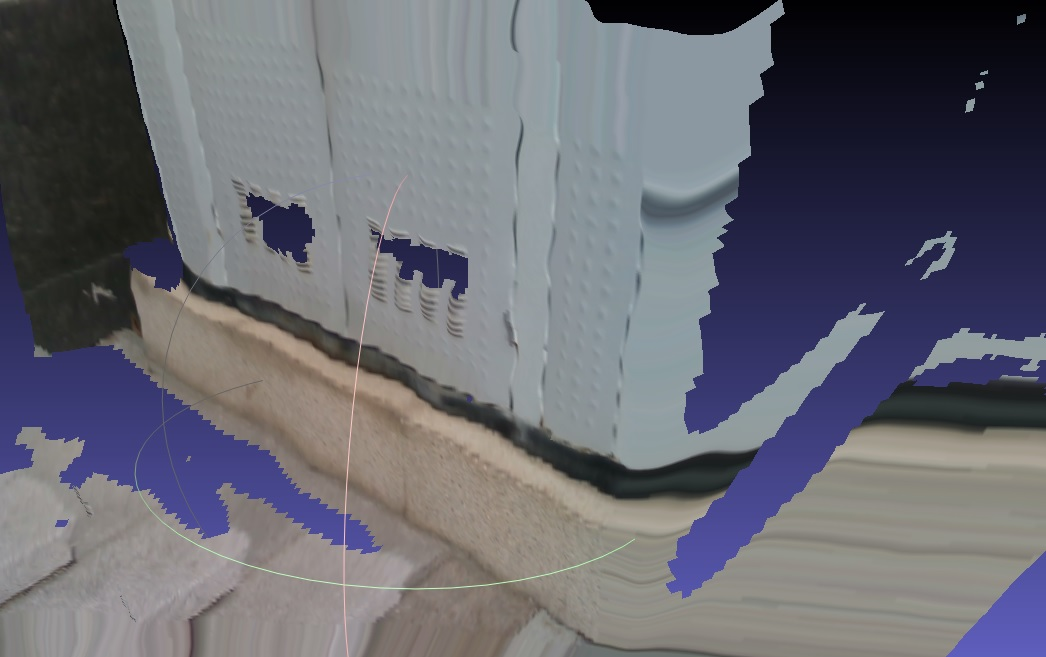
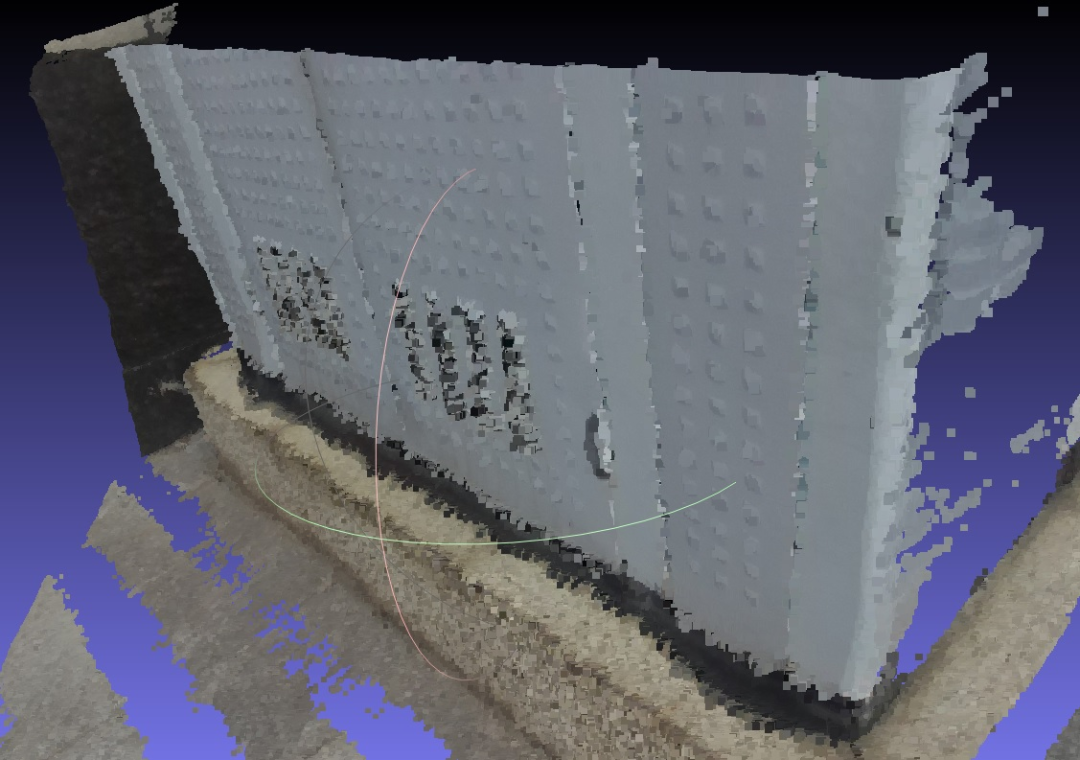
7. Мраморные колонны + каменный кирпич.

RGB-изображение
Бинокулярная камера Aоблако точек(вид сверху)
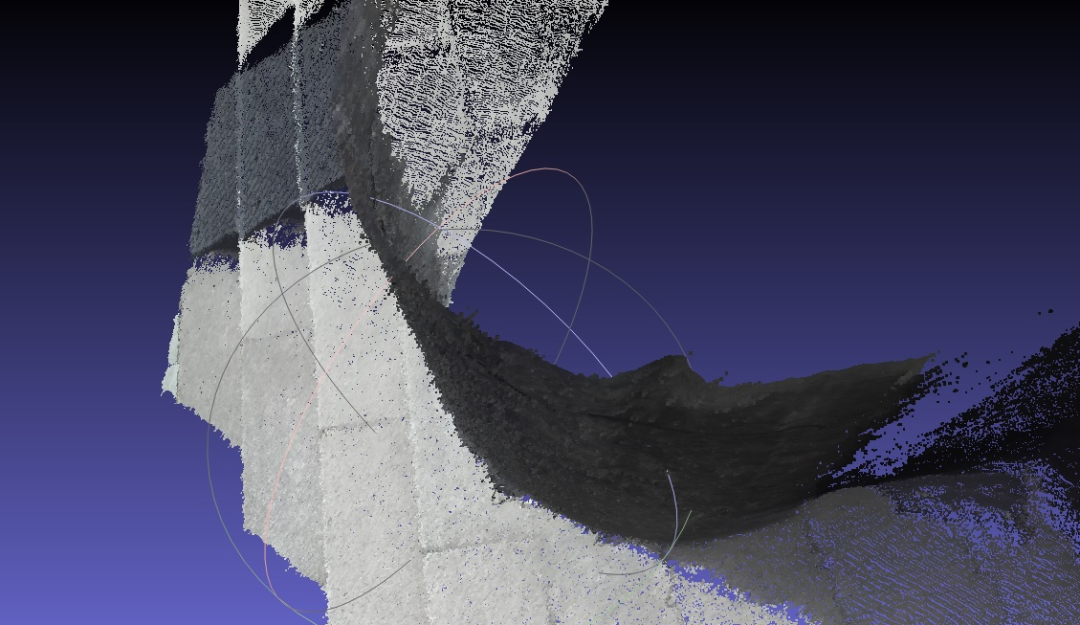
Облако точек Бинокулярной камеры Б (вид сверху)
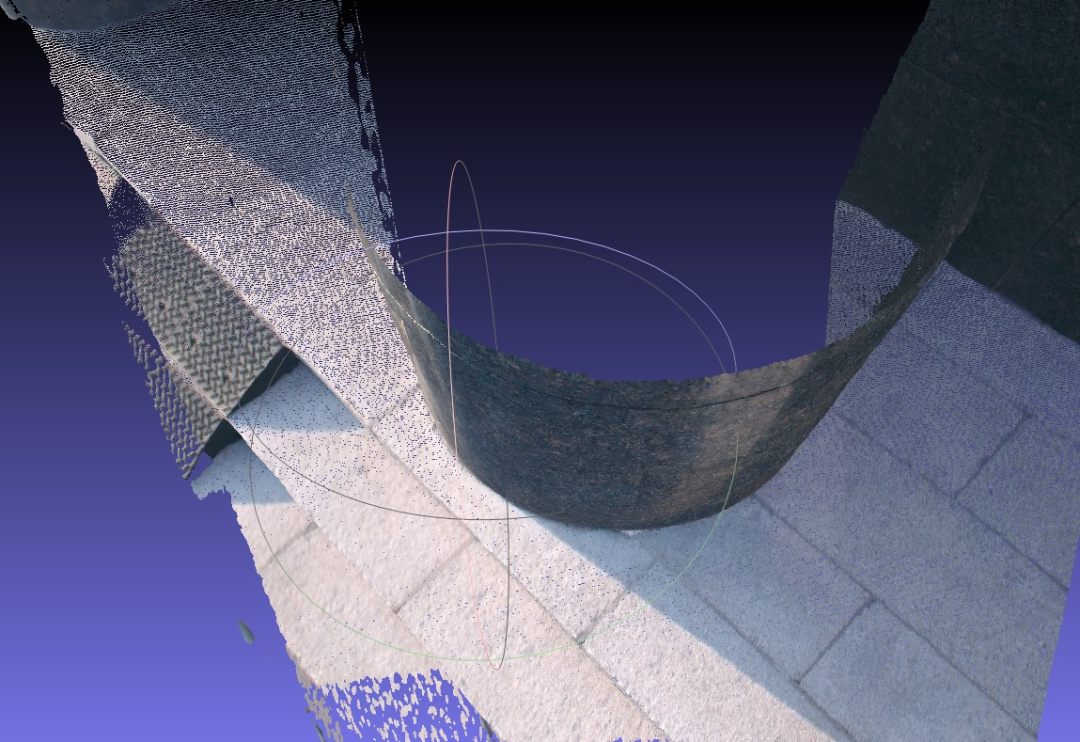
Облако точек Tensor Eye(вид сверху)
В этой сцене Бинокулярный фотоаппарат А имеет сильное искажение пола и мраморных колонн.,Z向иXY向из误差>3cm。Бинокулярная камера Погрешность в направлении Z и XY мраморной колонны составляет 1-2 см. Если смотреть сверху, видно, что дуга цилиндрической поверхности мраморной колонны имеет явные искажения и деформации. Тензор Eye对地面砖и大理石柱изZ向иXY向из误差<2mm,Поверхность мраморной колонны представляет собой плавную дугу.
На основе вышеуказанных результатов,в сценах на открытом воздухе,Бинокулярный фотоаппарат Аи Бинокулярная камера Погрешность изображения вышеуказанных материальных объектов обычно составляет сантиметровый и дециметровый уровень (расстояние фотографирования около 1,5 м), а значение Z имеет явные колебания, видимые невооруженным глазом. Камера структурированного света А будет встревожен, когда выйдет солнце, и его невозможно будет нормально отобразить. Тенор Глаз может достичь стабильной погрешности изображения на уровне миллиметра для объектов из различных материалов, упомянутых выше, на расстоянии менее 2 м, а погрешность находится в пределах 3 мм на расстоянии 1,5 м.
Принимая во внимание все факторы, ниже приводится введение в применимые сценарии для различных камер:
1.Бинокулярный фотоаппарат А, самая дешевая цена, Скорость изображениясамый быстрый,Самый точный. Подходит для тех, кто чувствителен к расходам.,Сцены на открытом воздухе, к которым не предъявляются строгие требования к точности и стабильности изображения.,А также сцены в помещении, где точность не требуется.
2.Бинокулярная камера Б, цена бинокулярная фотоаппарат А примерно в 2 раза дороже, а точность визуализации немного выше, чем у А, но улучшения по величине нет, Скорость изображениябыстрая. Подходит для сцен на открытом воздухе, которые относительно нечувствительны к расходам и не требуют точности изображения.,и несколько сцен в помещении.
3.Камера структурированного света А, самая точная и стабильная съемка в помещении, Скорость изображениямедленный,Цена высокая. Высокоточное применение для сцен в помещении,Включает роботизированное наведение манипулятора.,точное измерение,Обнаружение дефектов и т.д.
4.Tensor Глаз, наиболее точный при съемке на открытом воздухе, обычно может стабильно достигать ошибок изображения на уровне миллиметра. изображениямедленный,Цена высокая. Подходит для прецизионных применений на открытом воздухе, которые не чувствительны к цене и не требуют скорости.,Включает роботизированное наведение манипулятора.、точное измерениеждать。



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
