Базовый процесс разработки V4L2!
1. Что такое платформа V4L2?
Полное английское название V4L2 — Video for Linux2, который представляет собой драйвер ядра, специально разработанный для видеоустройств. При разработке видео мы обычно можем напрямую управлять камерой, управляя узлом устройства V4L2. Обычно узлом устройства V4L2 в Linux является **/dev/video0**. Будь то камера MIPI или камера UVC, их базовыми операциями по умолчанию являются узлы /dev/video0.
два. Схема структуры кода V4L2:
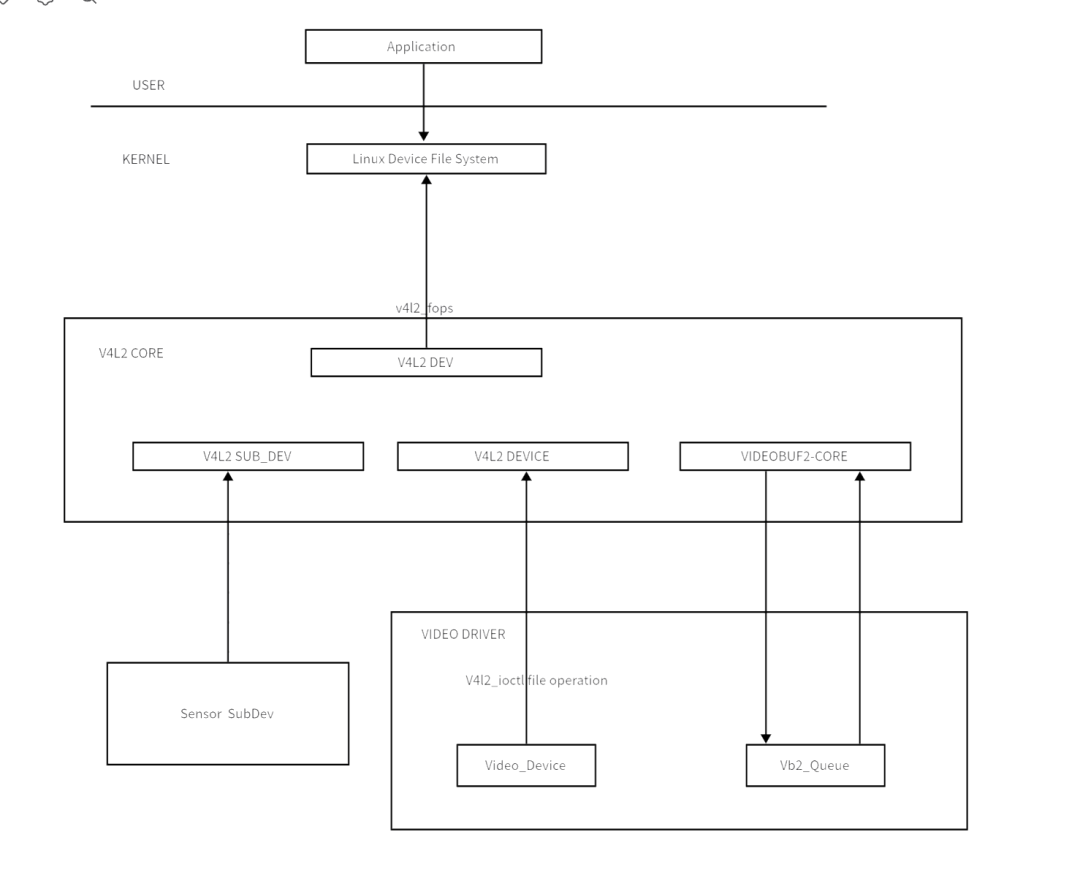
Как видно из этого изображения, при использовании V4L2 для управления камерой вам необходим доступ к драйверу ядра. Весь драйвер устройства работает на Linux. Device File Система управления, Linux File Systemпод управлениемV4L2COREфункция。иV4L2_COREОн содержитV4L2_DEV、V4L2_SUB_DEV、V4L2_DEVICE、VIDEOBUF2_CORE。в,V4L2_DEIVCEВ основном управляет драйверами видеоустройств.、VIDEOBUF2_COREВ основном управляет данными в очереди буфера、V4L2_SUB_DEVВ основном подсистема управления видеооборудованием。Если прикладной уровень хочет контролировать всюV4L2Если уровень драйвера контролирует,Вам нужно только выполнять операции fops (управление формой файла) на v4l2_dev.,Потому что v4l2_dev — это интерфейс, предоставляемый уровнем драйвера пользовательскому уровню.
три. Процесс разработки кода V4L2:
3.1. Откройте узел устройства:
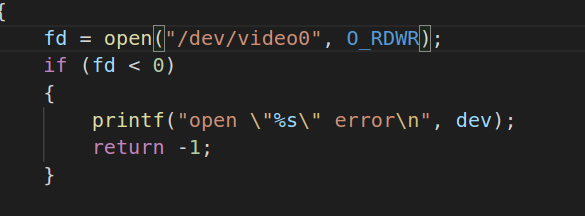
Откройте узел видеоустройства /dev/video0.
3.2. Запрос возможностей устройства.
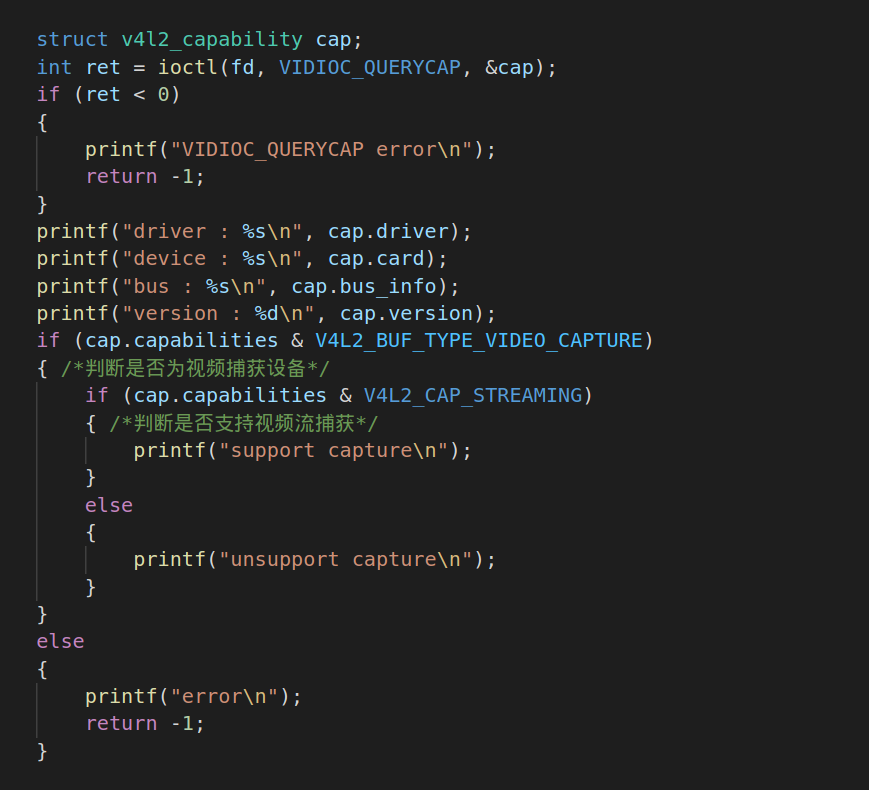
Использование функции ioctl для доступа к базовой команде VIDIOC_QUERYCAP V4L2 предназначено главным образом для запроса характеристик производительности камеры.
3.3. Получите формат, поддерживаемый камерой, и установите формат пикселей.
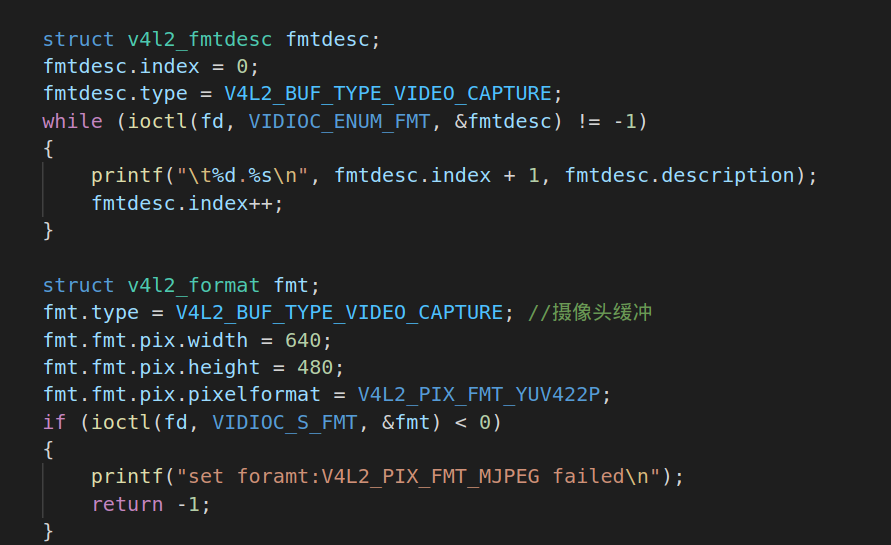
через ioctl VIDEOIOC_ENUM_FMT для получения соответствующего поддерживаемого формата,И установите камеру на соответствующий формат. В том числе: ширина, высота, формат пикселей и т. д. После завершения настройки,Затем используйте команду ioctl, чтобы включить операцию,Включите соответствующее ключевое слово:VIDIOC_S_FMT。
3.4. Сопоставление памяти с пользовательским пространством и операциями очереди.
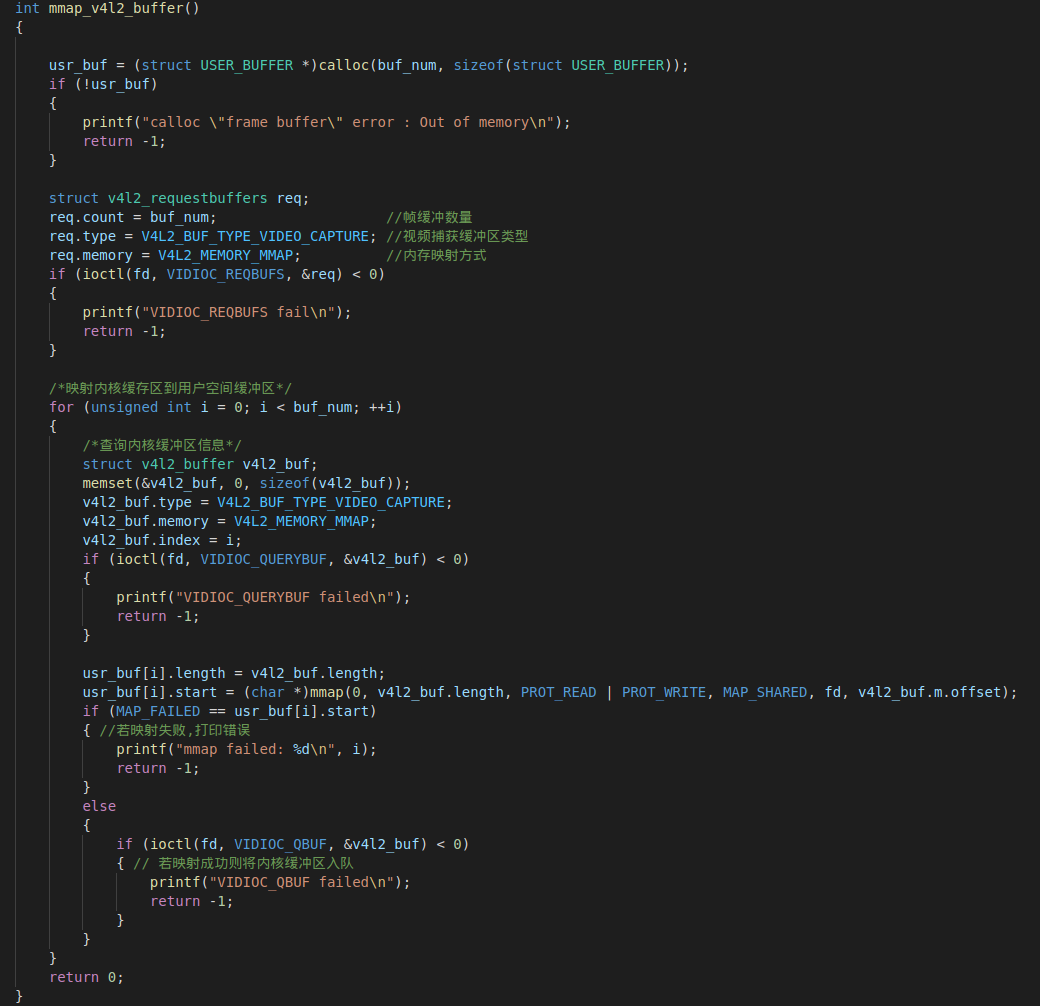
Используйте ioctl для управления VIDIOC_REQBUFS,Применить видеобуфер. После завершения подачи заявки,Сопоставить буферы драйвера с пользовательским пространством,API сопоставления использует mmap. Если сопоставление пользовательского пространства прошло успешно,Затем поместите видеоданные в очередь буфера.,Соответствует присоединению к командеioctlКомандаVIDIOC_QBUF。
3.5. Включите камеру для получения видеопотока.
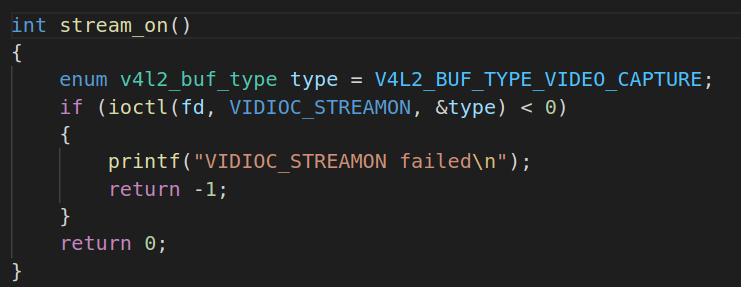
Используйте командуstream_on, чтобы включить камеру v4l2, чтобы она могла нормально запустить процесс сбора.
3.6. Вынуть видеоданные из буфера.
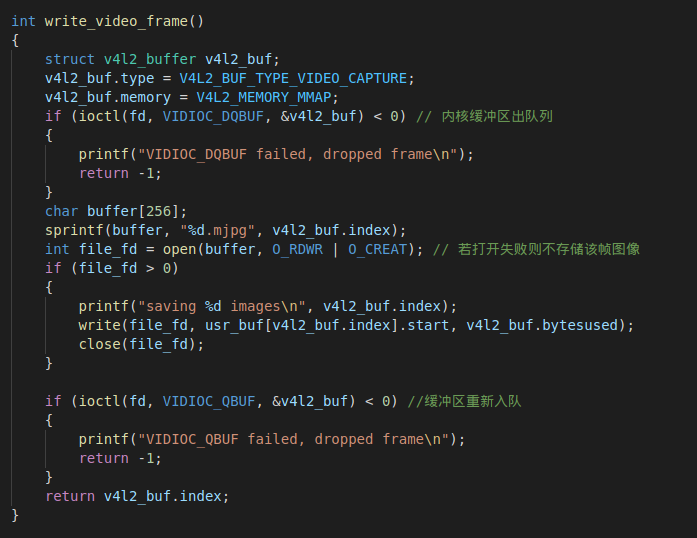
Используйте ioctl для извлечения видеоданных из буфера,它对应的КомандаVIDIOC_DQBUF。использовалVIDIOC_DQBUFпосле,Структура v4l2_buffer содержит соответствующие видеоданные. И запишите соответствующие данные в изображение mjpg. После выполнения всех вышеперечисленных операций,Затем поместите данные камеры в очередь операции VIDIOC_QBUF.
3.7. Выключите камеру для получения потока.
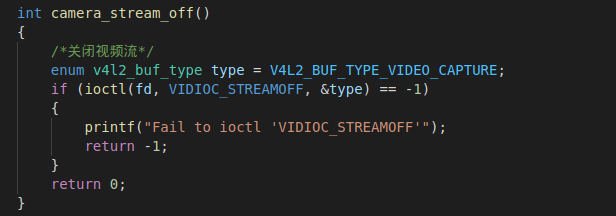
через команду управления ioctl VIDIOC_STREAMOFF закройте работу по сбору камер.
3.8.Несопоставленный буфер
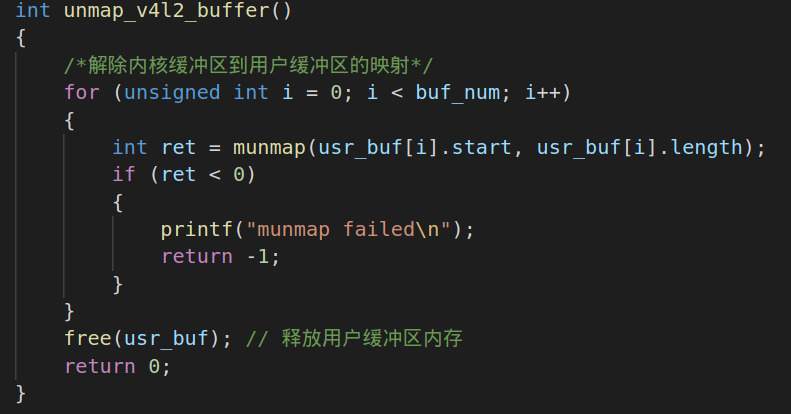
Используйте munmap api для решения операции сопоставления буфера ядра с пользовательским буфером.
3.9. Освободите все ресурсы.
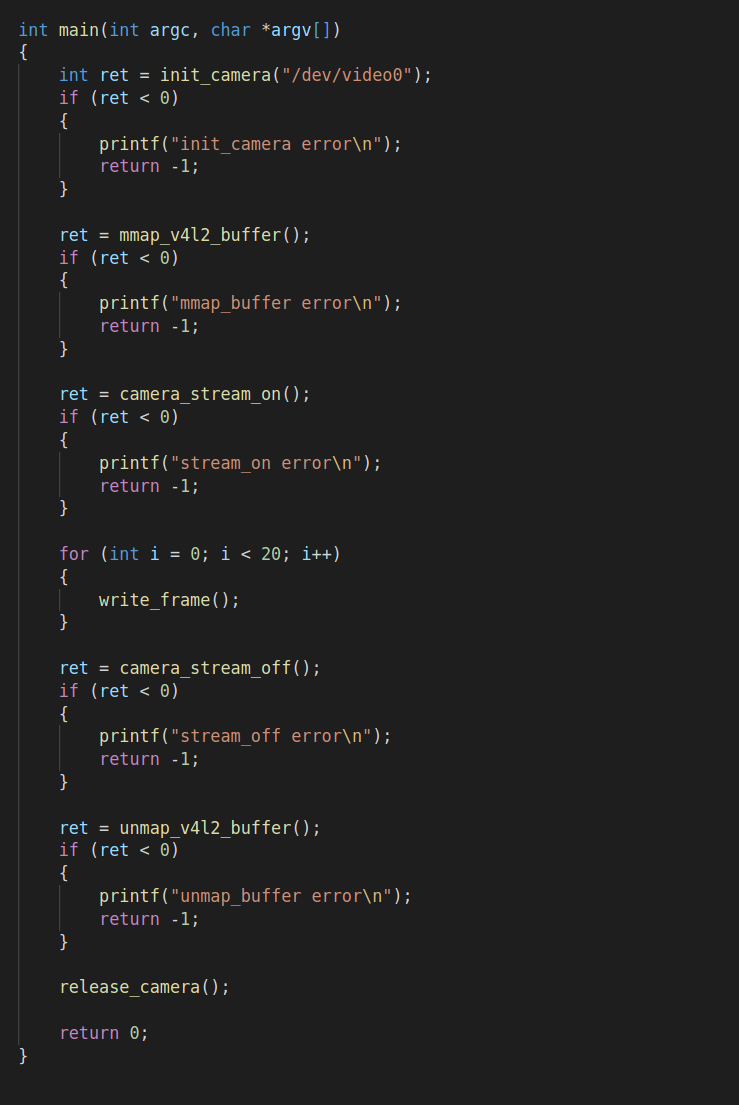
4. Процесс работы всего проекта:



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
