[Baidu Apollo] Изучение автономного вождения: углубленное понимание принципов визуального восприятия платформы Apollo
представлять
В разработке технологий автономного вождения решающую роль играет модуль визуального восприятия. Платформа автономного вождения Apollo от Baidu стремится использовать передовые технологии визуального восприятия для достижения точного восприятия и понимания окружающей среды транспортными средствами, тем самым обеспечивая безопасное и эффективное автономное вождение. Эта статья познакомит вас с основными принципами, техническими характеристиками и применением модуля визуального восприятия автономного вождения Baidu Apollo в автономном вождении.
1. Знакомство с модулем визуального восприятия
Являясь одним из наиболее важных датчиков в системе беспилотных транспортных средств, камера играет незаменимую роль в обнаружении препятствий и светофоров благодаря своей богатой информации и большому расстоянию наблюдения. Это важное дополнение к результатам восприятия лидара.
Однако камеры имеют такие недостатки, как легкое воздействие окружающей среды и отсутствие информации о глубине, что создает огромные проблемы для алгоритма визуального восприятия в беспилотных системах вождения. Поэтому создание набора высокоточных и высокостабильных алгоритмов зрительного восприятия является основной проблемой модуля восприятия автономного транспортного средства. Алгоритм визуального восприятия имеет три основных сценария применения на платформе Apollo, а именно: обнаружение светофора, обнаружение линии полосы движения и обнаружение препятствий с помощью камеры.
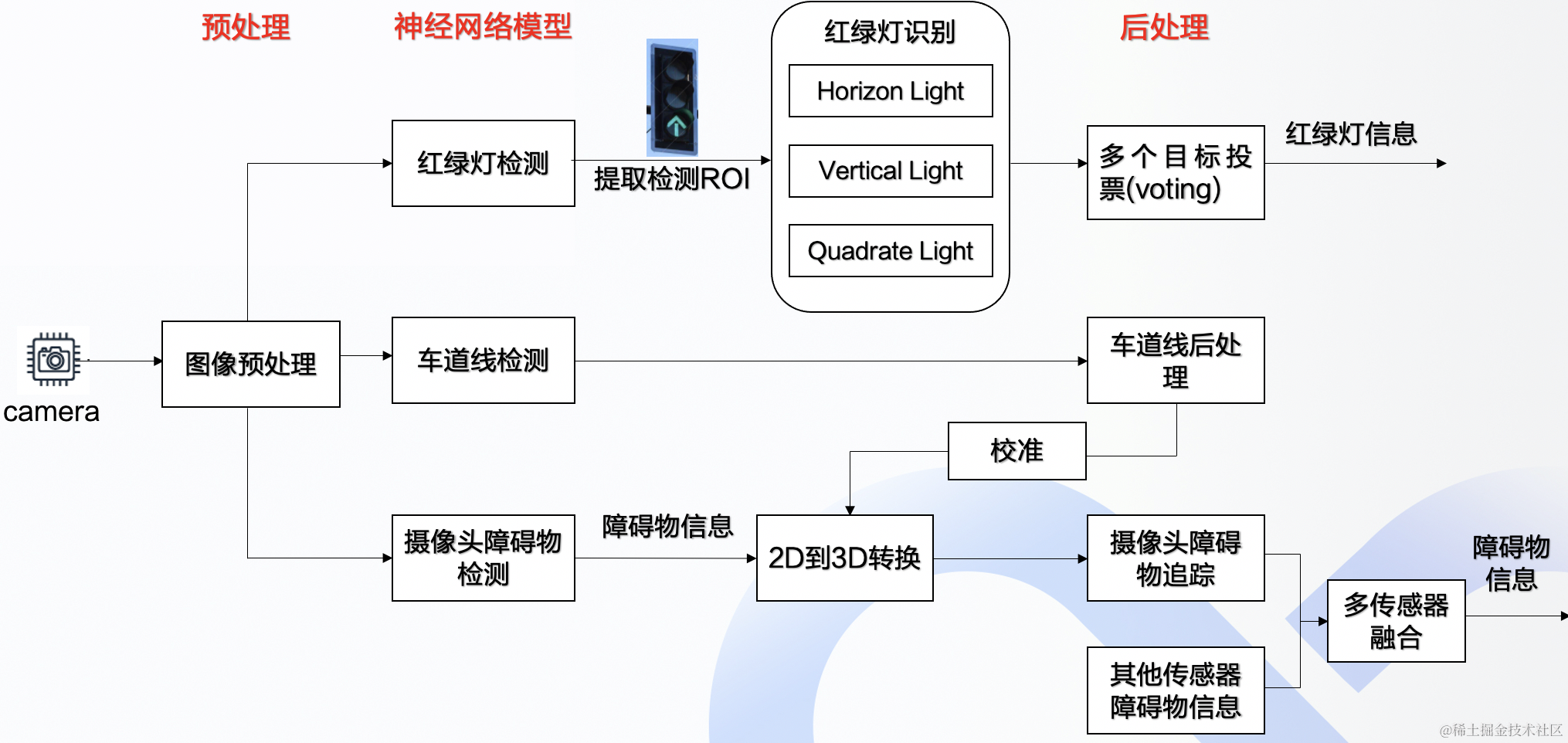
Каждый модуль можно разделить на 3 части: предварительную обработку изображения, модель нейронной сети и постобработку.
- предварительная обработка:Выполните некоторую обработку и интеграцию восходящей информации.,Это упрощает ввод информации непосредственно в Модель для прогнозирования.
- модель нейронной сети:В основном включает в себя некоторые алгоритмы глубокого обучения.,Включает обнаружение цели、Семантическая сегментация、Классификация изображений и т. д.
- Постобработка:Чтобы оптимизировать Модель Эффект,Мы будем использовать некоторые традиционные алгоритмы для дальнейшей оптимизации прогнозирования сети.,Пусть наш алгоритм работает более плавно на реальной машине.
2. Принцип работы модуля визуального восприятия
3. Принцип работы модуля обнаружения светофора.
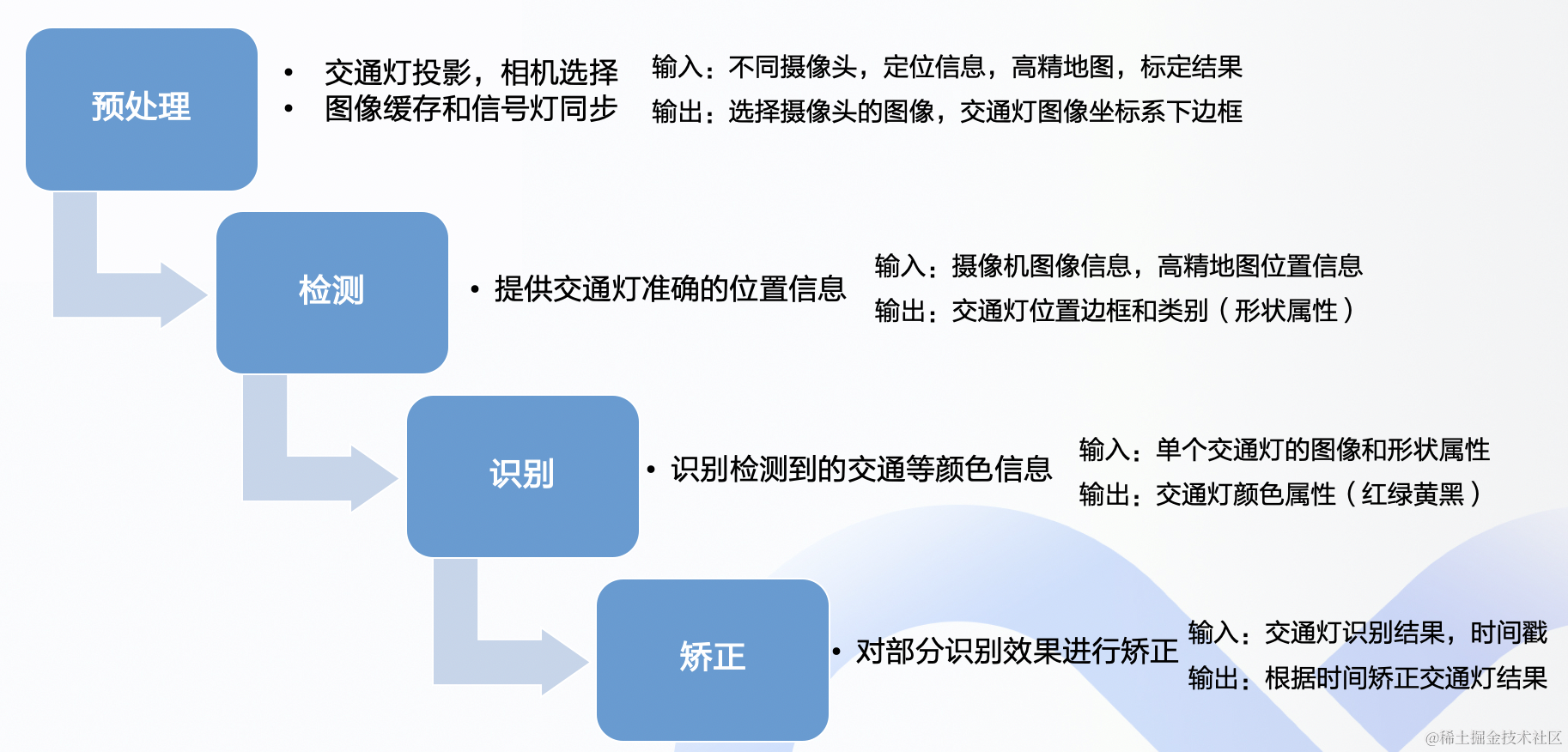
Основная функция модуля обнаружения светофоров — определение состояния светофоров в зоне видимости камеры в текущих дорожных условиях. Это типичная задача обнаружения целей. Как показано на рисунке ниже, модуль обнаружения светофора содержит в общей сложности 4 части, а именно предварительную обработку данных, определение положения светофора, распознавание и коррекцию светофора.
- Обычно светофоры занимают относительно небольшую долю изображения. Чтобы эффективно обнаруживать светофоры, мы будем использовать информацию, предоставляемую высокоточной картой, для предварительного извлечения приблизительного местоположения области светофора из изображения с камеры.
- Часть определения положения светофора использует обычный метод, основанный на CNN из Алгоритм обнаружения целей,Модель получения — просто выберите область,Выходными данными являются светофор по границе и светофор по категории.
- После завершения обнаружения необходимо определить цвет светофора. Мы обучили три легкие сверточные нейронные сети для классификации. Эти три сети соответствуют трем категориям результатов обнаружения: вертикальному, горизонтальному и квадратному.
- Наконец, корректор в основном предназначен для ситуаций, когда достоверность распознавания невысока, и корректирует текущий цвет светофора, запрашивая статус обнаружения предыдущих кадров.
4. Принцип работы модуля обнаружения линии полосы движения.
Мы рассматриваем алгоритм обнаружения линий полосы движения как задачу сегментации и стремимся определить семантическое расположение линий полосы движения на изображении. Даже если оно размыто, подвержено влиянию освещения или даже полностью перекрыто, мы надеемся его обнаружить.
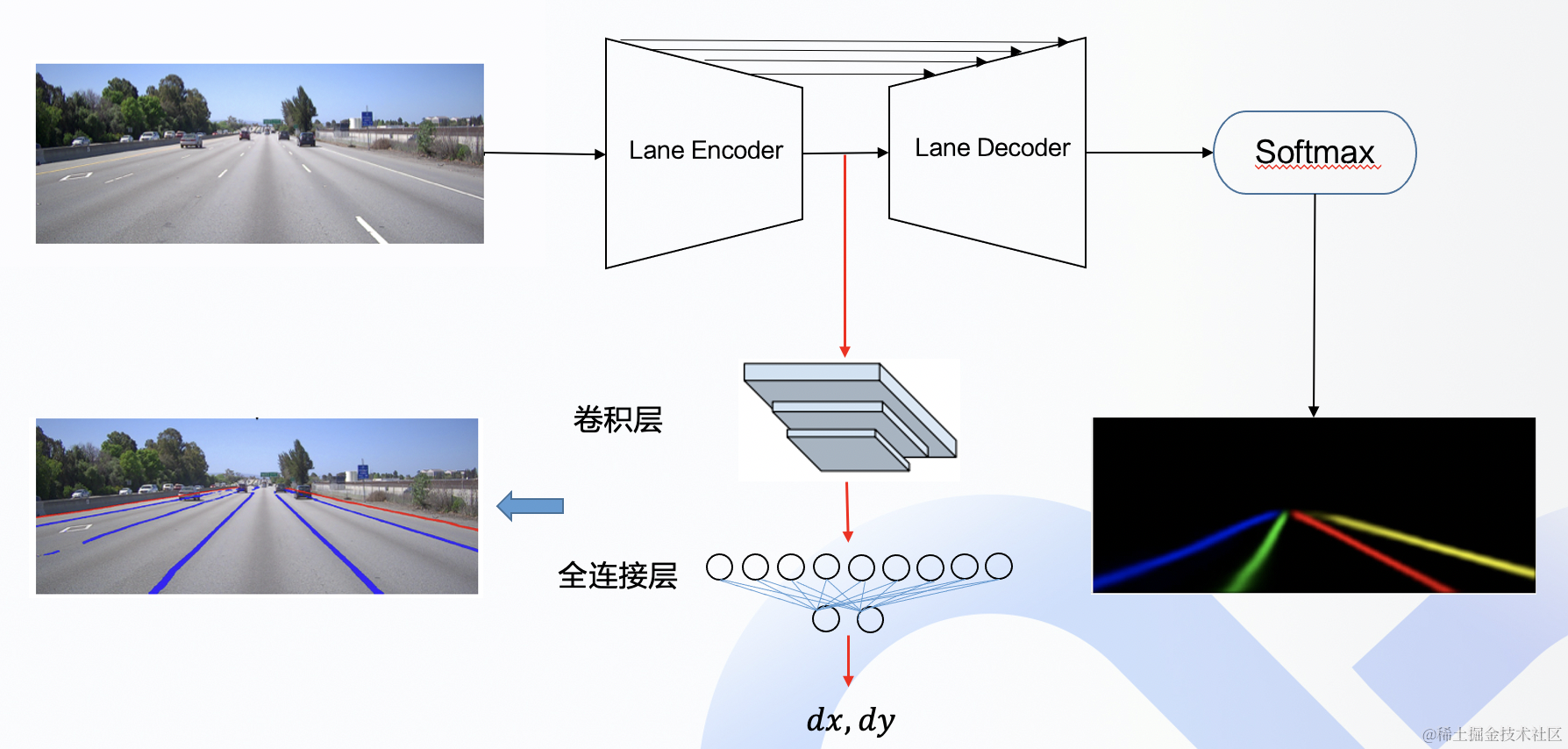
Структура сети обнаружения линий полос показана на рисунке выше. Магистральная сеть представляет собой сеть сегментации со структурой кодирования-декодирования, которая используется для вывода результатов сегментации линий полос. Подключите сетевую ветвь к концу кодера полосы движения, чтобы обнаружить точки схода.
Эта ветвь состоит из сверточного слоя и полностью связного слоя. Сверточный слой преобразует объекты полос для задачи схода, а полностью связный слой глобально суммирует все изображение и выводит положение точки схода.
Модель обнаружения линий полосы движения может эффективно обнаруживать линии полосы движения при перекрытии и при повороте.
5. Принцип работы модуля обнаружения препятствий
Часть обнаружения препятствий использует алгоритм обнаружения препятствий, основанный на монокулярном зрении, и получает информацию о категории и местоположении препятствий на основе изображений, полученных камерой.
Здесь используются семь переменных для представления трехмерной границы: длина, ширина и высота объекта, положение объекта x, y, z и угол поворота объекта θ.
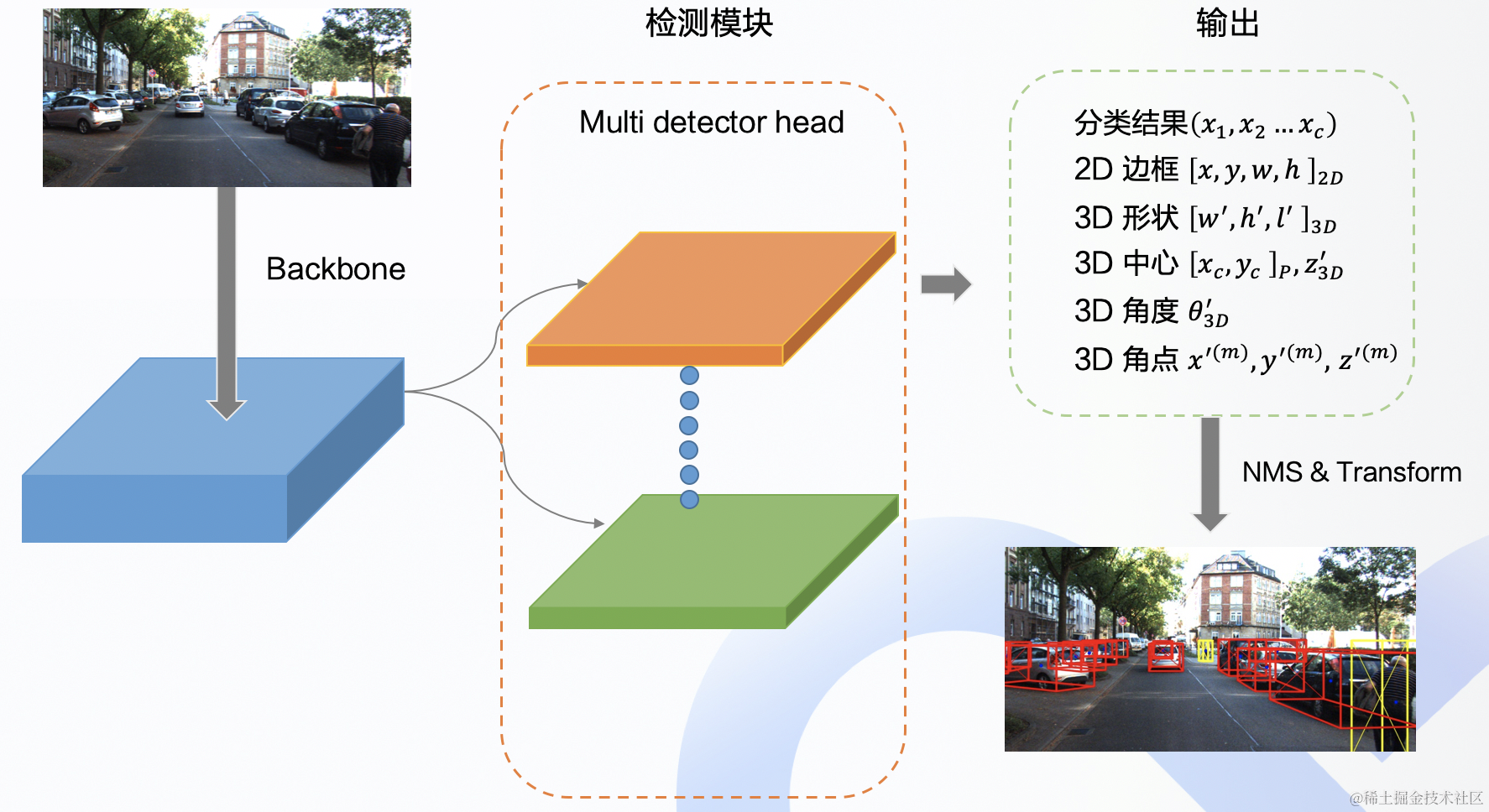
На рисунке выше представлена структурная схема модели трехмерного модуля обнаружения препятствий. Входные данные представляют собой информацию об одном изображении, характеристики извлекаются через нейронную сеть, и, наконец, подключается модуль обнаружения (у Apollo есть две модели обнаружения, одноэтапное обнаружение). на основе метода YOLO) и метода обнаружения, основанного на обнаружении центральной точки).
Наконец, с помощью модели можно получить трехмерную информацию о препятствии (длину, ширину, высоту, угол и т. д.), и на основе этой информации можно рассчитать трехмерную границу препятствия.
5. Резюме
Короче говоря, модуль визуального восприятия автономного вождения Apollo от Baidu имеет широкие перспективы применения в области автономного вождения благодаря высокой интеграции, работе в режиме реального времени, точности, адаптируемости и открытости. Благодаря постоянному развитию и оптимизации технологий модуль визуального восприятия Apollo обеспечит надежную поддержку более безопасного и разумного автономного вождения.



Неразрушающее увеличение изображений одним щелчком мыши, чтобы сделать их более четкими артефактами искусственного интеллекта, включая руководства по установке и использованию.

Копикодер: этот инструмент отлично работает с Cursor, Bolt и V0! Предоставьте более качественные подсказки для разработки интерфейса (создание навигационного веб-сайта с использованием искусственного интеллекта).

Новый бесплатный RooCline превосходит Cline v3.1? ! Быстрее, умнее и лучше вилка Cline! (Независимое программирование AI, порог 0)

Разработав более 10 проектов с помощью Cursor, я собрал 10 примеров и 60 подсказок.

Я потратил 72 часа на изучение курсорных агентов, и вот неоспоримые факты, которыми я должен поделиться!

Идеальная интеграция Cursor и DeepSeek API

DeepSeek V3 снижает затраты на обучение больших моделей

Артефакт, увеличивающий количество очков: на основе улучшения характеристик препятствия малым целям Yolov8 (SEAM, MultiSEAM).

DeepSeek V3 раскручивался уже три дня. Сегодня я попробовал самопровозглашенную модель «ChatGPT».

Open Devin — инженер-программист искусственного интеллекта с открытым исходным кодом, который меньше программирует и больше создает.

Эксклюзивное оригинальное улучшение YOLOv8: собственная разработка SPPF | SPPF сочетается с воспринимаемой большой сверткой ядра UniRepLK, а свертка с большим ядром + без расширения улучшает восприимчивое поле

Популярное и подробное объяснение DeepSeek-V3: от его появления до преимуществ и сравнения с GPT-4o.

9 основных словесных инструкций по доработке академических работ с помощью ChatGPT, эффективных и практичных, которые стоит собрать

Вызовите deepseek в vscode для реализации программирования с помощью искусственного интеллекта.

Познакомьтесь с принципами сверточных нейронных сетей (CNN) в одной статье (суперподробно)

50,3 тыс. звезд! Immich: автономное решение для резервного копирования фотографий и видео, которое экономит деньги и избавляет от беспокойства.

Cloud Native|Практика: установка Dashbaord для K8s, графика неплохая

Краткий обзор статьи — использование синтетических данных при обучении больших моделей и оптимизации производительности

MiniPerplx: новая поисковая система искусственного интеллекта с открытым исходным кодом, спонсируемая xAI и Vercel.

Конструкция сервиса Synology Drive сочетает проникновение в интрасеть и синхронизацию папок заметок Obsidian в облаке.

Центр конфигурации————Накос

Начинаем с нуля при разработке в облаке Copilot: начать разработку с минимальным использованием кода стало проще

[Серия Docker] Docker создает мультиплатформенные образы: практика архитектуры Arm64

Обновление новых возможностей coze | Я использовал coze для создания апплета помощника по исправлению домашних заданий по математике

Советы по развертыванию Nginx: практическое создание статических веб-сайтов на облачных серверах

Feiniu fnos использует Docker для развертывания личного блокнота Notepad

Сверточная нейронная сеть VGG реализует классификацию изображений Cifar10 — практический опыт Pytorch

Начало работы с EdgeonePages — новым недорогим решением для хостинга веб-сайтов

[Зона легкого облачного игрового сервера] Управление игровыми архивами
